Letové stabilizátory – ako to vidím ja: 4. (záverečná) časť
Úprava Orange RX3S 3-Axis Flight Stabilizer V2 (verzia bez prijímača)
Spojenie RX3S s SBUS prijímačom - cesta k ďalším kanálom
HW úprava – doplnenie SBUS invertora na dosku stabilizátora
autor: Lubond Štvrtá - záverečná časť série krátkych článkov venovaná týmto témam:
Štvrtá - záverečná časť série krátkych článkov venovaná týmto témam:









Úprava Orange RX3S 3-Axis Flight Stabilizer V2 (verzia bez prijímača)
K tomuto príspevku ma inšpiroval článok "Ed_20 Flight Stabilizer: aj s ovládaním podvozkovej nohy". V mojom prípade však nešlo o “nohu”. Išlo o to, ako získať nejaký ten kanál navyše. A čím ma článok nakopol?
Zmienky o steeringu (riadení) predného kolesa som doteraz nejako prehliadal, lepšie povedané púšťal som ich jedným uchom dnu a druhým von. Viete ako to býva – čo vás nepáli, nehasíte. Ako náhle sa téma steeringu objavila v súvislosti s RX3S, hneď som spozornel. Na to treba predsa sólo kanál - hmlisto som spomínal na zabudnutú tému. No a posledná Edova úprava (Ed_20) jeden kanál pridáva! Týmto aj mne svitla nádej. Priznávam bez mučenia – nie pre steering predného kolieska, ale pre získanie ďalšieho univerzálneho PPM kanála. Ten som si chcel “požičať” práve na úkor steeringu. Ako sa však neskôr ukázalo, kanálov bude dosť ... a nie len na steering.
Môj problém prichádzal postupne, keď som éra začal “vylepšovať” - začali chýbať kanály. Bohužiaľ, CPPM protokol podporuje maximálne 8 kanálov, a pridávať na palubu ďalší prijímač sa mi nezdalo elegantné. Nejako som vytušil, že sa mu nevyhnem a konečné riešenie ponúkne SBUS. Pojmom SBUS sa v podstate označuje Futabou navrhnutý dátový protokol nasúkaný do jednosmernej sériovej linky. SBUS podporuje (okrem iného) až 16 proporcionálnych kanálov. Informácie sa cez SBUS prenášajú digitálne, čo je asi jeden zo zásadných rozdielov oproti CPPM.
Skúsil som naťuknúť Eda, či by bola nejaká šanca využiť procesor v stabilizátore aj ako SBUS dekodér. Myslel som to asi takto: “Pre potrebu stabilizácie si vytiahni z SBUS protokolu čo potrebuješ a ostatné kanály z protokolu len prečítaj a vo forme PPM impulzov ich pošli na voľné piny procesora, my už si s nimi poradíme”. Lenže ...
Ako som tak trošku tušil a ako sa Edo jednoznačne vyjadril, hardvérové možnosti RX3S (voľné piny) a softvérové prostriedky procesora (pamäť, strojový čas) sú už teraz takmer na hraniciach možností. Takže bolo rozhodnuté - “tudy cesta nevede”. Treba si poradiť bez ďalšieho zdokonaľovania Edovho softvéru!
Spojenie RX3S s SBUS prijímačom - cesta k ďalším kanálom
Doteraz som sa s SBUS protokolom stretol len okrajovo. Keďže sa jedná o know-how komerčnej firmy, oficiálne špecifikácie nie sú verejne dostupné. Rozhodol som sa neoficiálne informácie overiť. Na bádanie som použil FrSky 8/16-kanálový prijímač X8R s 8 fyzickými výstupmi a jedným extra SBUS výstupom. Nejaké “nepravdy” som síce v neoficálnej špecifikácii odhalil, ale tie teraz nie sú dôležité. Podstatné je to, že SBUS linkou “tečie” protokol s dátami vysielanými v štandardnom poradí. Takže (v kanálovej sekcii protokolu) dáta o kanále CH1 idú ako prvé a dáta o kanále CH16 ako posledné. Dokonca, aj keď vysielač niektoré kanály nevysiela, len dáta chýbajúcich kanálov sú “nulové”. Inými slovami - formát protokolu je konštantný. Firmvér stabilizátora si v protokole vždy nájde to čo potrebuje. Vôbec nezáleží na tom, ako ja naalokujem kanály na fyzické výstupy prijímača.
Taranisa som nastavil na modulovanie 16-tich kanálov: prvých 8 kanálov bolo určených stabilizátoru a zvyšné 4 kanály prídavným servám a RC-spínačom na palube lietadla.
Prijímač má len 8 fyzických (kanálových) výstupov ale v protokole je kanálov až 16. A to, ktorých 8 kanálov sa na fyzických výstupoch prijímača objaví, to záleží od toho, ako sa prijímač nastaví. Stačilo si k nemu prečítať návod. Ak pri bindovaní použijem prepojku spájajúcu výstup kanála 1 s kanálom 2, a súčasne druhú prepojku s výstupom kanálom 3 a kanála 4, nabindujem prijímač do módu 4.
Založil som obe prepojky a prijímač som nabindoval. Potom som prepojky vybral a prijímač zapol. Hups! Oscík mi potvrdil, že všetkých 16 kanálov mi frčalo cez SBUS. A hlavne, druhá 8-mica kanálov (kanály CH9 až CH16) sa objavila na servo-výstupoch prijímača. Na výstupe označenom ako “1” sa objavil rádiový kanál CH9, na “2” kanál CH10, ..., na “8” kanál CH16.
V tomto momente sa (aspoň teoreticky) zdalo, že mám vyhraté. Ako vieme, stabilizátor si z SBUS-u vyberie svojich prvých 8 kanáov (CH1 až CH8) a zyšných 8 kanálov (CH9 až CH15) bude univerzálne použiteľných na fyzických výstupoch prijímača. Zostávala už len jedna otázka – ako dostať SBUS linku z prijímača do stabilizátora.
Poznámka: Podobným spôsobom sa dá použiť aj 6/16-kanálový prijímač X6R, samozrejme sa musím uspokojiť celkovo len so 14-timi kanálmi, 8 cez stabilizátor a 6 na výstupoch prijímača.
Ako je uvedené v dokumentácii k OpenFlightStab, sériový vstup do procesora je možný len cez RX pin sériového portu procesora. Ten však nie je štandardne zo stabilizátora vyvedený, ale na doske prístupný je. Takže bude potrebné sa k nemu nejako dostať.
HW úprava - doplnenie SBUS invertora na dosku stabilizátora
Pri prepojení prijímača so štandardným SBUS zariadením (SBUS servá apod.) nie je žiadny problém. Ale stabilizátor RX3S nie je štandardné SBUS-zariadenie. V tomto prípade bolo nutné SBUS-signál (výstup z prijímača) invertovať a až ten „otočený“ ponúknuť procáku v RX3S. Toš takto to páni od Futaby vymysleli, čo už.
Takýto invertor je síce hardvérová primitívnosť, ale invertovací kábel je ďalšia bižutéria na palube navyše.
V spomínanom článku Edo a Janko O. popisujú pridanie vstupu na pin RX (vstupný kanál pre riadenie podvozku), a zhodou okolností - mne sa pýtalo to isté, lenže ako SBUS vstup. Skúsil som to nakáblikovať, ale nebol som s tým spokojný (nie som asi dosť zručný ) – zdalo sa mi to dosť náchylné na odtrhnutie a to by bola za letu total katastróófa. Tak som sa rozhodol urobiť to inak - SBUS invertor som doplnil priamo na dosku stabilizátora a ako uvidíte, drátovanie úplne odpadlo.
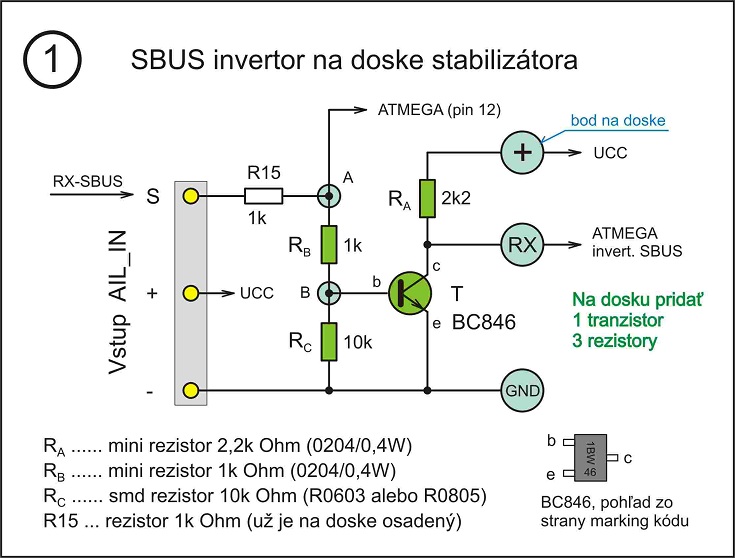
Obr. 1: Schéma zapojenia invertora.
Na dosku som pridal spolu 4 komponenty (na schéme sú zelené), 1 tranzistor a 3 rezistory. Sporovlivejším by stačil asi len 1 rezistor (RA), ale ja sa rád zichrujem a sofistikované riešenia ma mimoriadne uspokojujú . Niekto by odpor RB nahradil prepojkou a RC by úplne vynechal. Ale Hugo Ješita má skúsenosť, že neuzemnená báza vie narobiť neočakávané problémy, takže som to neriskoval ... odpor namiesto prepojky určite neuškodí (netreba ho extra izolovať).
Tu som spojil príjemné s užitočným a za vstup pre SBUS som zvolil fyzický vstup AIL-IN. Tento vstup sa v CPPM verzii firmvéru používa pre CPPM, v SBUS verzii však bude fungovať ako SBUS vstup. Žiadne cestičky nebolo treba prerušovať, takže po úprave je stále možné naflešovať aj CPPM verziu firmvéru. Invertor ostatné obvody prakticky nezaťažuje, len som zo vstupu kúsok “oddelil” pre budenie tranzistora.
Postup úpravy by mohol byť zrejmý z nasledovných obrázkov:
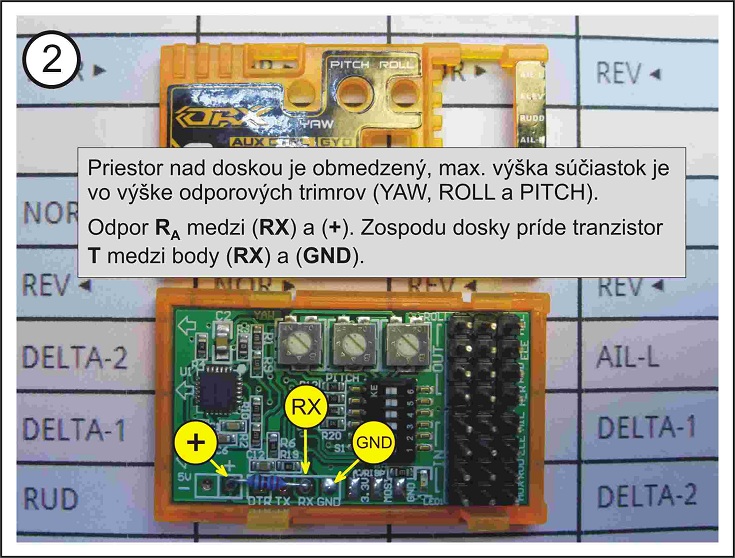
Obr. 2: Relevantné body na DPS (odfotil som to už keď bol RA osadený).
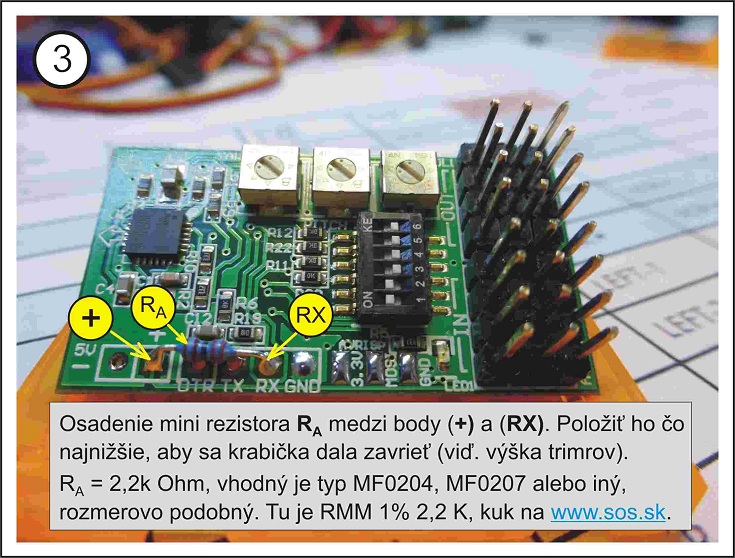
Obr. 3: Osadenie rezistora RA.
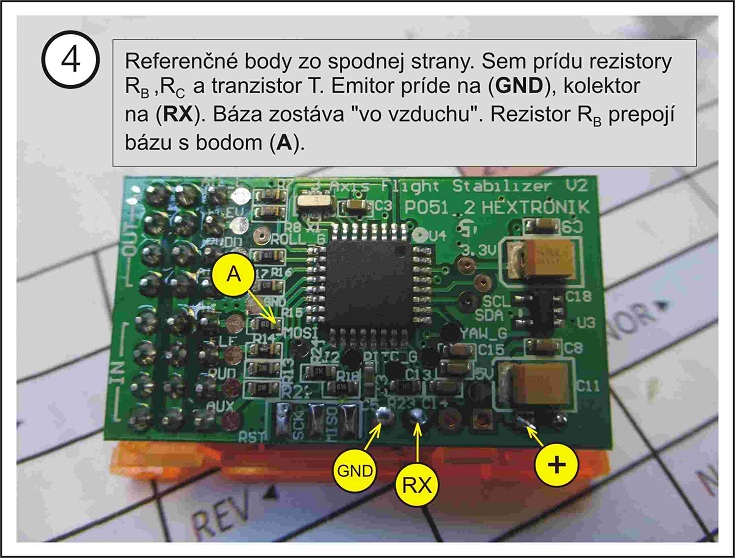
Obr. 4: Vzťažné body na DPS – zo strany procesora.
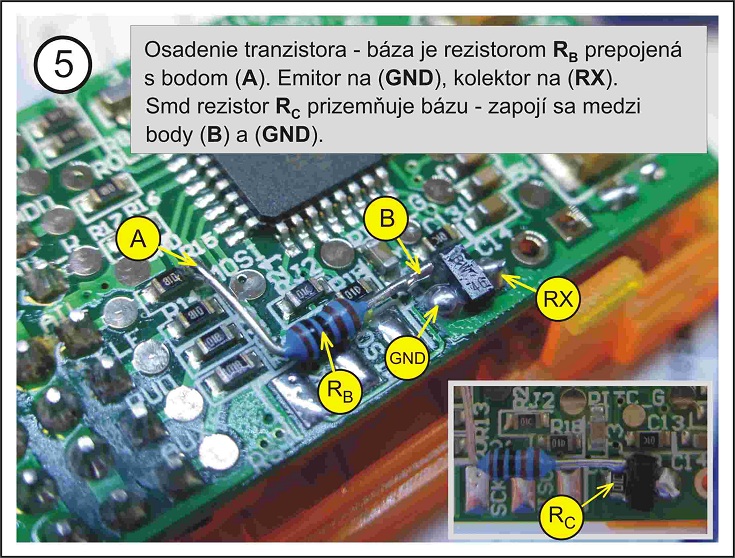
Obr. 5: Osadenie tranzistora, rezistora RB a nakoniec doplnenie smd rezistora RC.
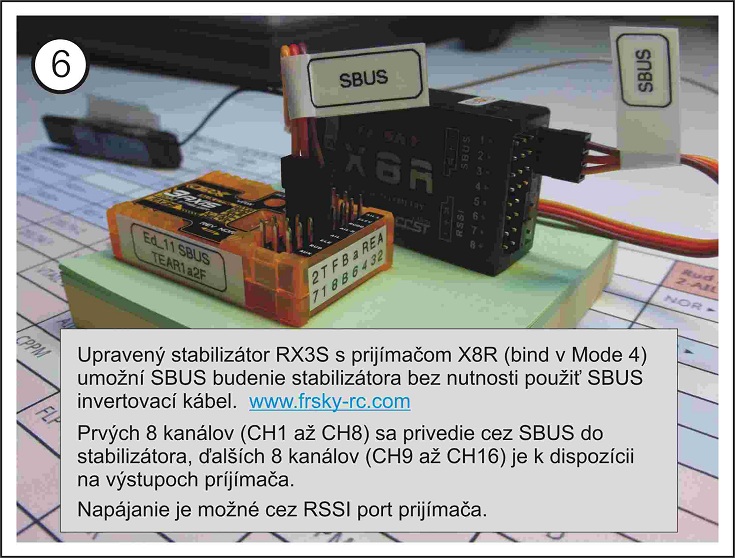
Obr. 6: Upravenú DPS zavrieť do krabičky a prepojiť s prijímačom obyčajným servo
káblikom.
Napájanie prijímača je možne urobiť rôzne: cez RSSI port, cez telemetrický S.PORT, štandardne cez nepoužitý servový výstup, alebo inak. Konzultujte to s návodom k prijímaču!
Pre niekoho možno trochu komplikácia, ale časť súčiastok je vo vyhotovení SMD.
Bohužiaľ, klasický (vývodový) tranzistor tam jednoducho nevojde. Snáď by ešte bolo vhodné pridané komponenty mechanicky poistiť, napr. silikónovým tmelom alebo tavnou tyčinkou.
Po tejto úprave by sa “pýtalo” v dokumente OFS opraviť riadok v tabuľke “RX3S V2 CPPM/Serial (SPEKTRUM/SBUS/SRXL)” nasledovne:
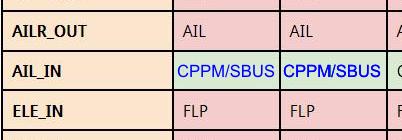
... pôvodne tam je len CPPM
<Staršie | tento článok | Novšie>
Napísané: 26. 4. 2021, 07:59 | Prečítané: 10040x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 10
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
a ešte taká drobnosť, aké je v Ed_11 poradie kanálov v CCPM S.BUS ?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Takýto dekodér obsahuje v podstate každý RC prijímač, pretože z vysielača do prijímača sa prenáša (jediný) signál PPM a úlohou dekodéra je tento sugnál "rozlúsknuť" a vyseparovať z neho jednotlivé kanálové impulzy.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Vysledok: 7 kanalov z krabicky stabilizatora a dalsich 8 priamo z prijimaca, teda spolu 15 kanalov. Preto jeden z podnadpisov "Cesta k dalsim kanalom"
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
A to poradie TEAR1aF ( alebo ine) si moder moze nastavit programovacim pripravkom, ako uz o nich kdesi bola rec.
Vystupov zo samotneho stabilizatora je ale ozaj len 7, lebo 1 z fyzicky pritomnych je obetovany na vstup samotneho signalu SBUS do stabilizatora.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Nepamätám sa, či toto je default poradie (prednastavené vo fw), alebo či som to prestavoval programovacím prípravkom - skôr to druhé. Prípravkom sa dá prestaviť na poradie futabácke RETA1a2F alebo akékoľvek iné, na aké je modelár zvyknutý.
Ten progr. prípravok je pre niekoho možno zbytočná komplikácia, ale myslím že sa oplatí si jeden zaobstarať - aspoň jeden "do partie". Umožní to na stabilizátore nastaviť (prestaviť) veľa užitočných vecí (P/I/D parametre, frejm rejty a DP filter pre digit. servá a iné). Zopár parametrov sa dá nastaviť "páčkovaním" cez rádio, ale niektoré idú prestaviť len cez progr. prípravok. Tabuľky nastaviteľných parametrov sú tu odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Nechtělo by se ti s časovým odstupem napsat ještě další pokračování? Používáš FrSky, nezkoušel jsi tedy přijímače FrSky se stabilizací - S6R, nebo S8R? (Sám jsem S6R testoval, a to v EPP Jetu).
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Nad pokračovaním som nerozmýšľal, zatiaľ. Nenašiel som novú inšpiráciu. RX3S je fajn ale zdá sa mi, že už o tom bolo napísané skoro všetko. Ak by bola nejaká téma, čo by zaujala a vedel by som sa vyjadriť, porozmýšľal by som. Ale vravím, zatiaľ ma nič nekoplo.
S6R tiež mám (v EPP akrobatovi) a príde mi to ako celkom slušný (aj cenovo) komerčák, ale úplne preklepnuté to ešte nemám. Začínam sa venovať akrobacii (klasická IMAC, žiadne 3D). Pôvodne som mal zámer v akrobatovi S6R serióznejšie otestovať, ale som sa k tomu viacmenej nedostal (výhovorka
 ), IMAC lietanie ma celého pohltilo. Pravdu povediac, S6R tu používam zatiaľ viac len ako prijímač, než stabilizátor. Tej akrobacii som dosť prepadol a S6R len občas prepínam do HOLD módu - keď si potrebujem potvrdiť, že problémom sú ručičky a nie počasie ... a tiež ako bezpečnostný doplnok pri vzletoch/pristátiach v problematickom počasí.
), IMAC lietanie ma celého pohltilo. Pravdu povediac, S6R tu používam zatiaľ viac len ako prijímač, než stabilizátor. Tej akrobacii som dosť prepadol a S6R len občas prepínam do HOLD módu - keď si potrebujem potvrdiť, že problémom sú ručičky a nie počasie ... a tiež ako bezpečnostný doplnok pri vzletoch/pristátiach v problematickom počasí.
Len čo sa v akrobacii trochu viac zdokonalím, tak sa zamyslím aj nad článkom. Možno niečo okolo témy ako využiť S6R pri akro nácviku, hoci v tomto momente sa mi táto téma zdá mierne kontraverzná. Musím to najskôr všetko dôkladnejšie "prežiť", nazbierať skúsenosti a nechať si to v hlave uležať. Potom sa uvidí. Ale vďaka ti za prvé vnuknutie!
Mimochodom, ak máš sám nejaké zážitky s S6R - sem s nimi! Priestor tu určite nájdeš a do diskusie sa rád pridám, kedykoľvek
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)