(„Cevaro“) Pozičné osvetlenie modelu: podrobne, aj s návodom
Už ani nevieme, ako veta pokračovala, ale podstatné je, že sa to ujalo a názov „nášho“ osvetlenia bol na svete.
Súčasne sme si uvedomili, že nikde na našej web-stránke nie je jeho ucelený popis, až to začalo vyvolávať dojem, že to nebodaj tajíme a žiadne detaily nechceme zverejniť.
A tak to teda bez problémov odtajníme a zverejníme aj so schémou, s návodom a programom pre mikrokontrolér, pre tých, ktorí by si to chceli sami zrealizovať.
Nie je na tom nič ťažké ani zložité, najprácnejšie je naťahať v krídlach a trupe modelu drôtiky k LED diódam.
autor: Janko O.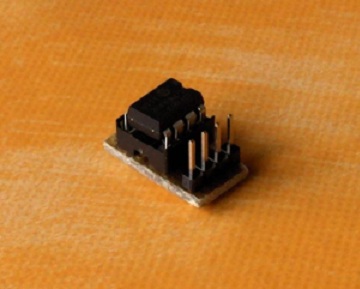 Názov „cevaro osvetlenie“ sme si nevymysleli, ale len prevzali. To raz, pri jednom podvečernom lietaní jeden náš modelársky kolega zahlásil: „To vaše cevaro-osvetlenie ...“
Názov „cevaro osvetlenie“ sme si nevymysleli, ale len prevzali. To raz, pri jednom podvečernom lietaní jeden náš modelársky kolega zahlásil: „To vaše cevaro-osvetlenie ...“









Najskôr uvedieme trochu slov a teórie a v druhej časti budú podklady (pre čoby len trochu zručného kutila) na výrobu takéhoto osvetlenia modelu.
Nie, my sme nič netajili, len sme si boli vedomí, že to „naše“ osvetlenie je akosi príliš tesne naviazané na palubnú časť (telemetrický modul) našej PC Telemetrie. A bez všetkých tých impulzov (PWM signálov), ktoré telemetrický modul „vyrába“, to nie je naše („cevaro“) osvetlenie.
A prečo impulzy pre cevaro-osvetlenie vyrába palubný telemetrický modul? Nuž preto, aby sme na tento účel nemuseli použiť ďalší mikrokontrolér, keďže v niektorých našich modeloch ich je naozaj požehnane (model CanadAir CL-84 si na palube nesie 11 mikrokontrolérov  ). A tak sme sa ešte pri koncipovaní charakteru osvetlenia modelu rozhodli, že signály pre osvetlenie bude generovať mikrokontrolér modulu telemetrie (ktorý toho síce robí dosť, ale toto navyše hádam ešte zvládne).
). A tak sme sa ešte pri koncipovaní charakteru osvetlenia modelu rozhodli, že signály pre osvetlenie bude generovať mikrokontrolér modulu telemetrie (ktorý toho síce robí dosť, ale toto navyše hádam ešte zvládne).
A tak bol kruh uzatvorený a my sme si akosi ani neuvedomili, že do neho okrem nás nikto nemôže vstúpiť.
Až … Na jar tohto roku sa Miroslav rozhodol predať niektoré svoje modely (pod heslom: „Redukcia letového parku“). A boli medzi nimi aj také, ktoré už boli vybavené „našim“ osvetlením. A tak vyvstala otázka: „Čo s tým?“ Nechať tam (pomerne veľký, drahý a zložitý) palubný telemetrický modul nemalo zmysel a bez neho by zase zvyšok osvetlenia (kabeláž, LEDky, výkonový spínač a stabilizátor prúdu) nefungoval.
A tak Miroslav vymyslel, že je treba zrealizovať malinký svetelný modul, ktorý bude generovať „svetelné“ impulzy (tzv. dvoj-blik) a PWM signál (tzv. podsvietenie) tak, aby osvetlenie potenciálnemu záujemcovi – kupcovi fungovalo rovnako ako v ostatných našich modeloch.
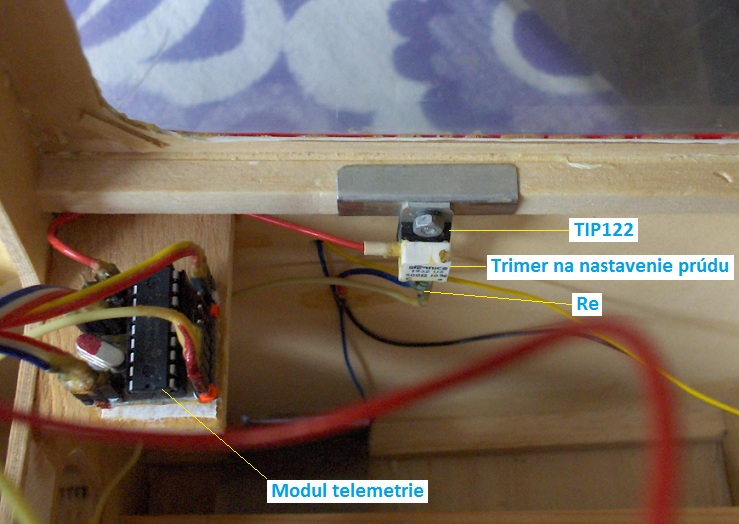
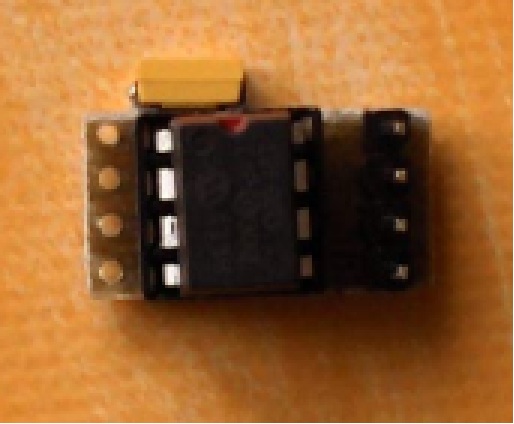
Vyrobil som teda pre Miroslava malinký super-jednoduchý modul, aký vidíte na obrázku:
Skladá sa len z dvoch súčiastok (ak v tomto prípade za súčiastky nepokladám plošný spoj, päticu na IO a 4-pinový konektor): mikrokontroléra PIC12F683 a tantalového kondenzátora 10u, ktorý len blokuje napájacie napätie. Samozrejme, všetko „čaro“ cevaro-osvetlenia robí softvér.
No ale teraz zrejme nastal ten správny čas, aby som rozpovedal aj druhý príbeh. Jeho predohrou je fakt, že naše osvetlenie sa síce páčilo viacerým modelárom, avšak potenciálnym záujemcom sme (do istej doby) vždy so smútkom v hlase oznámili, že tie parádičky - tie „cingrlátka“ robí mikrokontrolér (telemetrie) a že ak ho v modeli nemajú, tak smola  .
.
Až mi minule zavolal na mobil náš modelársky kolega a kamarát z Prešova Blažej Jurko, že on by si také osvetlenie aj urobil, ale aby som ho nasmeroval, že kde na našej stránke máme zapojenie a ďalšie podklady na výrobu. A ja som si v tej chvíli uvedomil, že rôzne čiastkové zapojenia nášho osvetlenia na našej web-stránke síce sú, ale celé je to také roztatárené, že sa v tom ani divá sviňa nevyzná  . A tak som si povedal, že teraz je ten čas, dať to dokopy, aby to bolo na jednom mieste a aby to bolo jasné a zrozumiteľné.
. A tak som si povedal, že teraz je ten čas, dať to dokopy, aby to bolo na jednom mieste a aby to bolo jasné a zrozumiteľné.
Pri popise jednotlivých častí „cevaro-osvetlenia“ pôjdeme od zadu: začneme teda LEDkami. Používame 3-Watové farebné výkonové LEDky (väčšinou zakúpené na ebayi). Hoci sú trojwatové, tak týmto výkonom zasvietia len krátko - počas krátkeho impulzu. Potom nasleduje dlhá medzera, kedy majú čas sa ochladiť a tak ich priemerný výkon je len niekoľko desatín Watu, takže nie je nutné, aby boli nejako chladené, dokonca ani nemusia byť na chladiči . Kvôli dobrej rozpoznateľnosti polohy modelu pri podvečernom lietaní sú umiestnené na štyroch významných miestach modelu:
-
červené na ľavom krídle
-
zelené na pravom krídle
-
žlté (oranžové) na chvoste
-
biele na predku trupu modelu
Najprv sme dávali po jednej takejto LEDke, teraz (s pribúdajúcim vekom a teda zhoršujúcim sa zrakom) vytvárame paralelné dvojice, s možnosťou vytvoriť trojice atď. Schéma výkonovej časti:
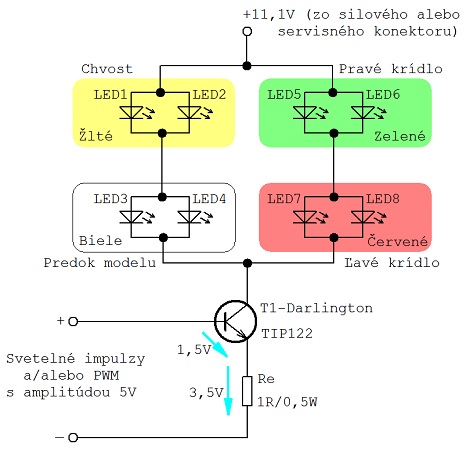
Tranzistor T1 (v Darlingtonovom zapojení) TIP122 plní dvojakú úlohu: výkonový spínač prúdu (v impulze preteká obvodom prúd asi 3,5A) a spolu s rezistorom Re aj úlohu stabilizátora prúdu. Ten je potrebný na to, aby LEDky svietili rovnako bez ohľadu na stav nabitia pohonnej batérie, z ktorej je obvod napájaný.
Inštalácia častí osvetlenia v samokrídle Xeno
Tranzistor ani nemusí byť na chladiči, pretože sa príliš nehreje, vzhľadom na to, že zapojenie funguje v takom impulznom režime, kde impulzy sú krátke a medzery dlhé.
Inštalácia častí osvetlenia v modeli Partenavia P66 Oscar
Aj rezistor Re je výkonovo poddimenzovaný: ten sa síce hreje, ale slúži aj ako poistka: ak niečo zblbne, rezistor sa prepáli a všetko ostatné tak zachráni.

Inštalácia častí osvetlenia vo vetroni Heron
Pri napájaní z 3-článku LiPol je dobré dodržať kombináciu sériového zapojenia farieb ako na obrázku (schéme), inak nemusia všetky farby svietiť rovnako.
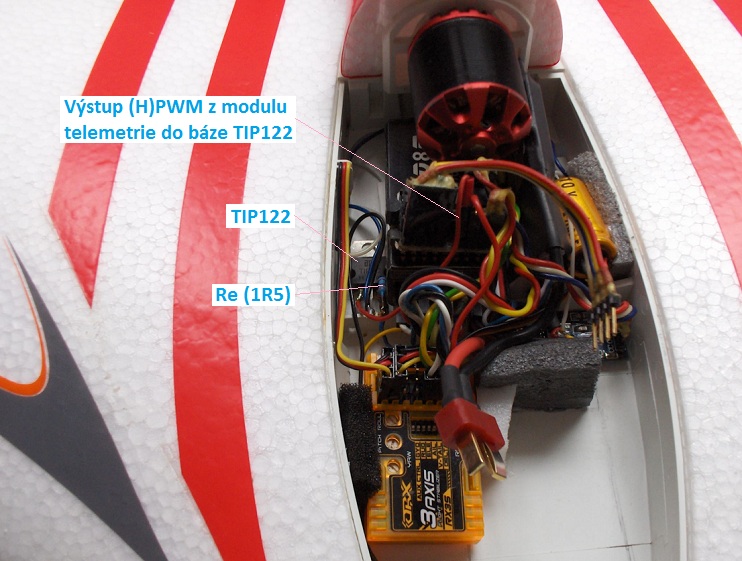
Pripojenie výkonovej časti osvetlenia k nášmu telemetrickému modulu ukazuje nasledujúci obrázok (takto sú zapojené osvetlenia prakticky vo všetkých našich modeloch):
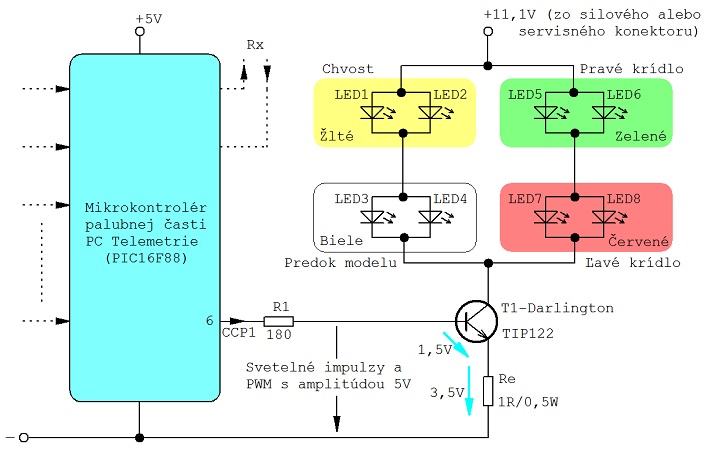
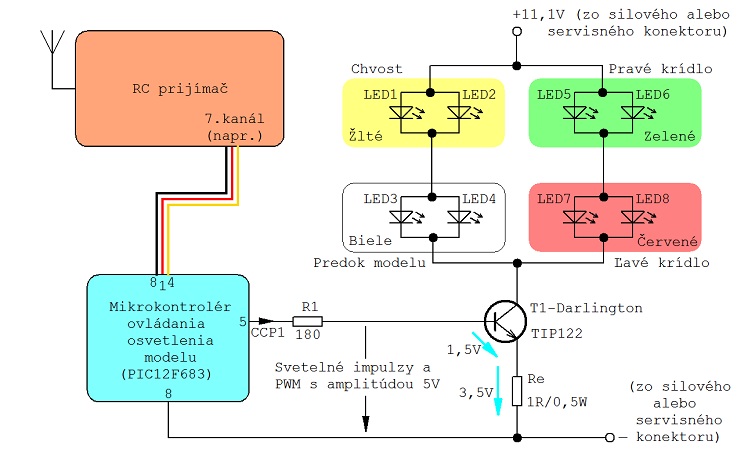
Vývod mikrokontroléra CCP1 (Capture/Compare/PWM) je špeciálny vývod (nemajú ho všetky mikrokontroléry), ktorý v tomto prípade umožňuje tzv. hardvérové PWM. PWM (Pulse Width Modulation) v našom cevaro-osvetlení slúži na tzv. „podsvietenie“ - LEDky svietia zníženým výkonom. Bolo by síce možné použiť softvérové PWM, avšak mikrokontrolér by bol jeho generovaním tak vyťažený, že by nestíhal ostatné veci, alebo ak aj, tak by sa to prejavovalo na nepravideľnosti jeho činnosti. Naproti tomu hardvérové PWM funguje tak, že vyhradené obvody v mikrokontroléri samostatne a nezávisle na jeho „jadre“ vytvárajú impulzy a medzery tých správnych dĺžok (PWM), zatiaľ čo samotný mikrokontrolér (jeho jadro) sa venuje iným činnostiam a keď treba, tak len zmení hodnotu Činiteľa plnenia - Duty cycle (pomer dĺžok impulzov a medzier).
Z radu „malých“ (8-vývodových) mikrokontrolérov má hardvérové PWM (vývod CCP1) čip PIC12F683. Zapojenie cevaro-osvetlenia s takýmto obvodom môže vyzerať takto:
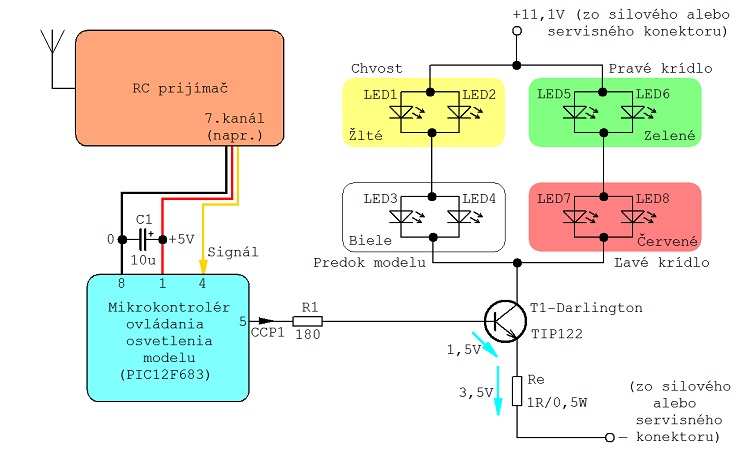
Ale lepšie bude nasledujúce zapojenie, kde vidno aj blokovací kondenzátor C1 a nie je tam (možno mätúce) dvojité zapojenie vývodu mikrokontroléra číslo 8.
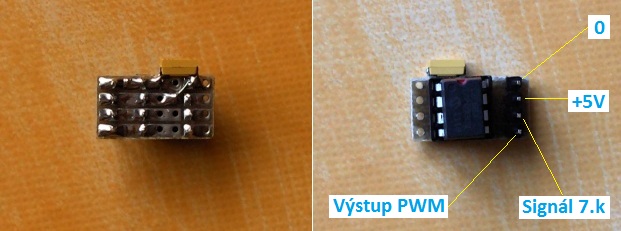
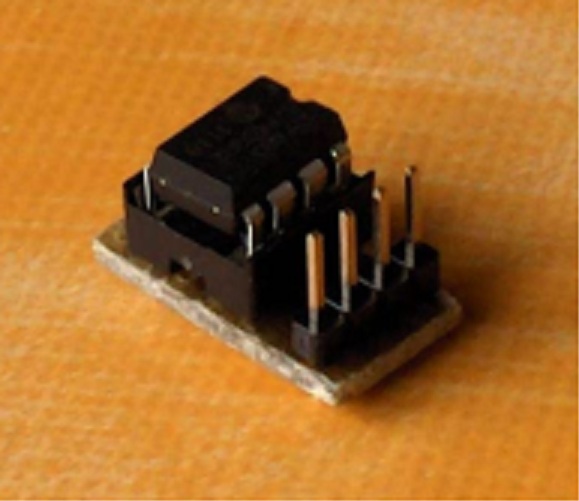
Modul osvetlenia (mikrokontrolérová časť) môže byť rýchlo a jednoducho vyrobená aj takto (tu sa však signál z prijímača privádza na pin číslo 6):
.jpg)
Osvetlenie sa zapína (a rovnako aj vypína) tak, že kanálové impulzy z RC prijímača (v modeli Twin Star sme využili 6. kanál), privádzané na vstup mikrokontroléra musia na chvíľu presiahnuť dĺžku 1950 mikrosekúnd (Na toto si treba dať pozor: máme spätné "echo" od niektorých modelárov, čo sa rozhodli toto osvetlenie zrealizovať, že im to vraj nefunguje. Po telefonickom vykonzultovaní, či ich vysielač dáva naozaj impulzy dlhšie ako 1950us, sa nám dotyční ozvali, že už to funguje. Preto: u niektorých (skôr starších) vysielačov je nutné pomocou EPA (End Point Adjustment) nastaviť dostatočnú šírku impulzov! (aj nad 100%. Tieto vysielače majú rozsah: -100% = 1100us a +100% = 1900us)), tak ako to ukazuje nasledujúce video:
Ovládanie osvetlenia modelu samostatným kanálom
U modelov, kde sú využité všetky kanály (napr. vetroň Heron), sme použili princíp „fantómového“ kanálu: kanál č. 8 je využitý na nastavovanie Master Gainu letového Open stabilizátora Ed_11. Pri dĺžke impulzov 1500us je stabilizácia vypnutá. Pri impulzoch kratších ako 1500us sa zvyšuje stabilizačný účinok v režime RATE (zelený stĺpček narastá naľavo od stredu), pri impulzoch dlhších ako 1500us (nepresiahne však hodnotu 1950us) sa zvyšuje stabilizačný účinok v režime HOLD (zelený stĺpček narastá napravo od stredu). Stlačením spínača osvetlenia dĺžka impulzu 8. kanálu presiahne hodnotu 1950us (kanály č. 9 a 10 sa FrSky modulmi neprenášajú) a osvetlenie sa zapne (alebo vypne). Toto sa však na stabilite letu modelu prakticky nijako neprejaví, nehľadiac na to, že je vhodné zapnúť osvetlenie ešte pred štartom. Ovládanie osvetlenia cez fantómový kanál ukazuje nasledujúce video:
Ovládanie osvetlenia cez fantomový kanál vo vetroni Heron
Ako vyzerá „cevaro“ osvetlenie v praxi môžete vidieť na videách, uvedených v článkoch „Rozlúčka s vetroňmi – 2015“, „Rozlúčka s (babím letom a) vetroňmi – 2015 – 2. časť“ a „„Osvietený“ Skipper na snehu: prepásol som tohoročnú šancu?“, prípadne na nasledujúcom videu:
"Cevaro" osvetlenie v praxi: zapnutie a vypnutie
Dodatočne sme pre vás upravili program tak, aby blikač fungoval aj bez privedenia ovládacieho signálu z RC prijímača: vtedy blikač začne fungovať (podsvietenie + dvojblik) hneď po pripojení pohonnej batérie v modeli.
Ale aktivuje sa len vtedy, keď do vstupu (pin 4 alebo 6) blikača nie je privádzaný ŽIADNY signál z RC prijímača (tento nepoužitý vstup je vhodné pripojiť na GND - teda mínus pól). Čiže z prijímača je privedený len GND a napájanie (GND - čierny, +5V - červený) a signál nie. Ak používate 3-žilové kábliky, tak ten signálový (biely alebo žltý) vytiahnete z konektora. Vtedy, hneď po pripojení batérie, si program v blikači "osahá" ovládací vstup a ak tam nie je žiadny signál, tak sám rozsvieti svetlá a začne "dvoj-blikať".
Taktiež sme pripravili dve verzie programu: jedna so vstupom ovládacieho signálu z RC prijímača na pin mikrokontroléra číslo 4 (tak ako je to na schéme) a druhú so vstupom ovládacieho signálu na pine mikrokontroléra číslo 6 (tak ako je to na fotografii).
Softvér (hex-súbory) pre mikrokontrolér PIC12F683 sa nachádza v sekcii Download alebo:
<Staršie | tento článok | Novšie>
Napísané: 27. 4. 2021, 08:06 | Prečítané: 13844x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 32
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Naozaj to tam sľubujeme. Musím sa pozrieť, v čom je problém.
Zatiaľ Sorry.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Tá funkcia už tam je zakomponovaná.
Ale aktivuje sa vtedy, keď do vstupu (pin 4 alebo 6) blikača nie je privádzaný ŽIADNY signál z RC prijímača.
Čiže z prijímača privedieš len GND a napájanie (GND - čierny, +5V - červený) a signál nie. Ak používaš 3-žilové kábliky, tak ten signálový (biely alebo žltý) vytiahneš z konektora.
Vtedy, hneď po pripojení batérie, si program v blikači "osahá" ovládací vstup a ak tam nie je žiadny signál, tak sám rozsvieti svetlá a začne dvoj-blikať.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Mozno to niekomu pomoze, kedze podobny problem sa tu uz vyskytol.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Vďaka
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pri použití 1W LEDiek by mal mať rezistor väčšiu hodnotu: či 3-krát, to neviem, lebo my 1W LEDky nepoužívame a nemáme ich parametre zmerané: odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Len to vyžaduje nejaký čas a ak je to väčšia úprava, tak to treba aj odskúšať. A my nemáme nejaký testovací modul na experimentovanie.
Dosiaľ sme na požiadanie stvorili viacero verzií softvéru tohto blikača. Naposledy sme niekomu poslali verziu (dva bliky) bez podsvietenia. Ak chcete, tak vám ju prepošlem, ale novú verziu už vymýšľať nebudem.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pariznám sa, že nerozumiem:
- Ja trafopájkou spájkujem všetku elektroniku, aj SMD (okrem silových vodičov).
- Mám tomu rozumeť tak, že ti to nefunguje?
- Chceš , aby som ti to vyrobil ja, alebo chceš tie svoje predať?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 .
.
Urobil som plošák s IO a nebolo toho, kto by mi tam napalil ten program-nik nemá čas. No a blikač s tranzistorom je nespoľahlivý,spozdenie, občas to nejde, sveti a nebliká...takže preto. Dohodneme sa?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Čo sa toho napálenia týka, obrátil si sa na nesprávnych ľudí. Ja čas mám, ja ti to napálim hocikedy.
Ten jeden "zvyšný" mám na to, že občas príde mail, že niekto chce niečo odskúšať, alebo zmeniť/upraviť program, aby to robilo tamto alebo hento.
Ak ti ho predám, nebudem mať možnosť niečo také urobiť a odskúšať.
Pali, nerob ani plošák, urob vrabčie hniezdo (s päticou) a tie 3 súčiastky vhodne usporiadaj a zaisti tavnou pištoľou.
Procesor ti naprogramujem.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 , poviem
, poviem Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
S modely nemám nic společného, ale byl jsem požádán, abych tohle blikátko vyrobil.
Protože nemám zkušenosti s PIC, předělal jsem program pro procesor ATtiny13 (jeden z typů velice rozšířených Arduin).
Zároveň jsem tam přidal volbu obou režimů rozsvěcení LED.
Jestli se to někomu bude hodit, tak tady je k dispozici zdroják programu i s ukázkou na YouTube.
odkaz
Doufám, že autorovi původního programu nebude vadit, že jsem si na web vypůjčil jedno z jeho schémat.
Pokud ano, tak ho samozřejmě smažu.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Chcem si nainstalovat vase cevaro osvetlenie na mikrovrtulnicek Eachine E130, ktory je vsak cely riadeny z jednej zakladnej dosky, kde mam len 8V a to uz mikrokontroler neprezije. Skusal som ho napojit ja napajanie serva kolektivu, vtedy system pekne blikal no bral som stavu servu a vrtulnicek tak nebol ovladatelny.
Vyskusal som ho napojt ai priamo na silovy kabel od 2S LiPolky (7,4V), kde to pri prvom teete fungovalo no pri druhom teste som odpalil kondik na PICku.
Dakujem za akukolvek radu a cest vasej praci!
odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Podľa datasheetu by mal PIC-mikrokontrolér fungovať aj pri napájaní z jedného článku LiPol.
Takže smelo do toho!
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Ako tu mozem nahrat fotky do komentara? Rad by som poslal odforene ako to mam zapojene.
Vdaka za pomoc :)
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
- PIC napájajte (krátkymi vodičmi) z napájania serv kolektívu (5V). On nežerie toľko (pár mA), aby to niečomu vadilo.
- LEDky samozrejme napájajte zo silového rozvodu - tých 8V.
Ak to nebude fungovať, chyba je niekde inde.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Tak nakoniec sme s Blažejom zistili, že nemôžem PIC napájať z iného zdroja než z danej batérie, z ktorej napájam LEDky. Neviem aký to má súvis, ale niečo na tom zrejme je lebo keď si vezmem, že pri klasickom zapojení cez prijímač, z ktorého napájam PIC a do ktorého mi vstupuje výstup z regulátora, z ktorého je napájaný TIP tak sa kruh uzavrie a všetko bliká ako má.
Vykoumali sme nasledujúce napojenie - všetko napájané z 2S balancéra :) A na TIP 122 sme pridali jeden odpor navyše na sredný pin ako sa napája "-" z LEDiek.
odkaz
Z balancéra + ide na + LEDiek v sérii; stredný kábel ide na + napájania PIC a z - na balancéri je urobená rozdvojka, z ktorej sa napája - na PIC a zároveň - na TIPe.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
možno som vás na začiatku nie úplne dobre pochopil.
Až teraz som si všimol, že PIC ste chceli napájať zo samostatnej (teda inej LiPolky).
Aj to by šlo, ale vtedy treba spojiť - (mínus) vývod tohto článku s - vývodom tej pôvodnej pohonnej LiPolky.
Ja som si myslel, že chcete PIC napájať z 1.článku tej pôvodnej pohonnej LiPolky.
Musí fungovať jedno aj druhé!
Priznám sa, že mi nie je úplne jasné, načo ste tam zapojili ten odpor do kolektora TIPu (stredný vývod).
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
//Blikač s ATtiny13A výstupy 2,3 (2blik za sebou)
void setup() {
pinMode(3, OUTPUT); //nastav pin 2 jako výstup
pinMode(4, OUTPUT); //nastav pin 3 jako výstup
}
void loop() {
digitalWrite(3, HIGH); //na pinu 2 zapni proud
delay(50); //počkej 50 ms
digitalWrite(3, LOW); //na pinu 2 vypni proud
delay(150); //počkej 150 ms
digitalWrite(3, HIGH); //na pinu 2 zapni proud
delay(50); //počkej 50 ms
digitalWrite(3, LOW); //na pinu 2 vypni proud
delay(200); //počkej 200 ms
digitalWrite(4, HIGH); //na pinu 3 zapni proud
delay(50); //počkej 50 ms
digitalWrite(4, LOW); //na pinu 3 vypni proud
delay(150); //počkej 150 ms
digitalWrite(4, HIGH); //na pinu 3 zapni proud
delay(50); //počkej 50 ms
digitalWrite(4, LOW); //na pinu 3 vypni proud
delay(1000); //počkej 1 s
}
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)