Ed_20 Flight Stabilizer: aj s ovládaním podvozkovej nohy
Veď je to takmer presne mesiac, čo sme predstavili firmvér Ed_11: pokračovateľa veľmi úspešného Open Flight Stabilizera Ed_10.
Cez to všetko sme si však občas povzdychli: „Škoda že nemá stabilizáciu riadeného podvozkového kolesa, tak ako to mal (a ešte stále má) náš AssOrx verzie 5-3-5“.
No ale teraz sa to zmenilo: verzia Ed_20 má aj stabilizáciu riadeného podvozkového kolesa.
autor: Janko O. Skoro by sa dalo povedať: „Do mesiaca a do dňa“.
Skoro by sa dalo povedať: „Do mesiaca a do dňa“.









V niektorých našich modeloch (ktoré majú samostatne riadené podvozkové koleso) ešte stále používame náš vlastný letový stabilizátor AssOrx verzie 5-3-5. Sme ale zrejme jediní, pretože sa ukázalo, že okrem nás si AssOrx-a vyrobil už len náš poľský modelársky kolega Bogdan.
Ani sa nečudujeme, dôvod je jasný: AssOrx je komplikovaný a pracný na výrobu, čo drvivú väčšinu modelárov vždy odradí. A tak sme sa sami potešili, keď sme objavili Open Flight Stabilizer amerického modelára JahnaRB, kde stačí vziať originálny „Orange“ letový stabilizátor Rx3S a preflešovať jeho firmvér.
Žiaľ, po počiatočnom nadšení sme dospeli k názoru, že jeho stabilizačný mód Rate je síce fajn, ale mód Hold je (mimo 3D akrobaciu) nepoužiteľný a na stabilizačné vlastnosti nášho AssOrxa sa takpovediac „nechytá“. Ak niekto namieta, že však stačí mód Rate, tak n-tý krát zopakujem, že:
Oproti dobrému módu Hold je režim Rate len stabilizáciou tretej triedy.
A tak sme sa dostali do stavu, že so slzami v očiach sa rozlúčime s Open Stabilizerom, odprosíme „starého dobrého“ AssOrxa a opäť ho namontujeme do našich modelov. Jedine, že by sa stal zázrak  .
.
A on sa asi naozaj stal: najprv sa ponúkol náš kamarát Imrich Kišš, že keď bude mať trochu času, skúsi upraviť zdrojový kód Open Flight Stabilizera od JohnaRB. Bolo treba upraviť tú časť kódu, ktorá spôsobovala jav, ktorému sme dali meno „strašná necnosť“. V tom ale do „deja“ nečakane a s plným nasadením vstúpil náš kamarát a modelársky kolega tu, z Banskej Bystrice, Eduard Bovan - Edo B. Poslal rovno upravený kód. Nebolo to síce ešte úplne ono, ale po viacerých konzultáciách Edo poupravil zdrojový kód Open Stabilizera podľa našich predstáv. Tie vychádzali z mnohých praktických skúseností s našim AssOrxom, avšak vďaka tomu, že signál nemusel prechádzať viacerými procesormi, bol Edov softvér takpovediac „hbitejší“, čo sa prejavilo najmä pri menších modeloch, kde bol AssOrx náchylnejší k rozkmitaniu stabilizovaného systému.
Po viacerých úpravách a verziách Edo poslal na otestovanie verziu Ed_9, ktorá fungovala tak ako sme chceli, ale k úplnej dokonalosti jej chýbalo také to správne vyvážené nastavenie PID-hodnôt. Opäť sme využili osvedčené hodnoty z AssOrxu, Edo ich implementoval do default-nastavenia Open Stabilizera a tak uzrela svetlo sveta legendárna verzia Ed_10. Tá bola do súčasnej doby „naflešovaná“ do desiatok a možno až stoviek letových stabilizátorov.
Lenže …
Potreba stabilizácie samostatne riadeného podvozku a vynikajúce výsledky letového stabilizátora Ed_10 nám nasadili chrobáka do hlavy: čo tak k Ed_10-ke realizovať akýsi prídavný modul, ktorý by si z Ed_10-ky „vycucol“ gyro-efekt a „pribalil“ by ho k signálu riadenia podvozkovej nohy. A tak sme ešte na jeseň (podzim) roku 2015 taký modul zrealizovali:
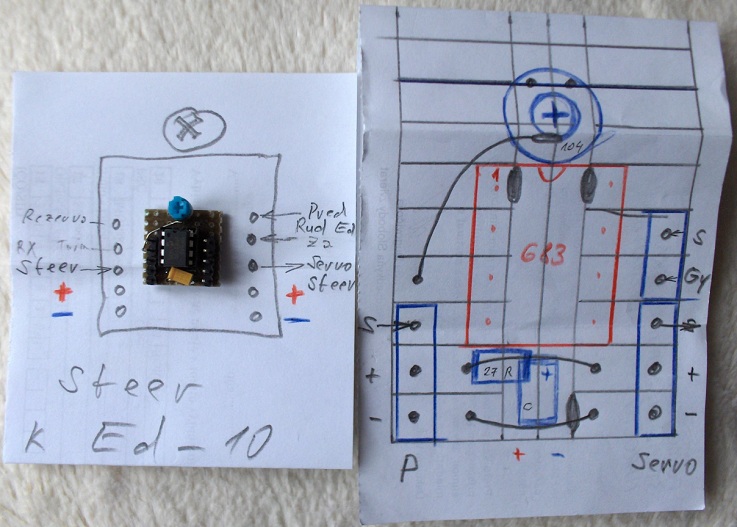
Je osadený procesorom PIC12F683 a okrem už spomínaného obsahuje aj funkciu timera (opäť „obšľahnutého“ z AssOrxu), kedy sa po dvadsiatich sekundách vypne ovládanie podvozkovej nohy, aby jej servo počas letu zbytočne „necvičilo“. Pohnutím páky, ovládajúcej podvozok (napr. tesne pred pristátím), sa jeho riadenie (a stabilizácia) opäť zapne.
V roku 2015 sme funkciu tohto prídavného modulu už nestihli otestovať a tak až vo februári (v únoru) tohto roku ho Miroslav nainštaloval do svojho dvojmotoráka SkyMule. V priebehu marca (března) všetko aj úspešne otestoval.
Takže modul riadne funguje, ale ako by som povedal: „zaváňa“ AssOrxom. Nie v zmysle funkcie, to je OK, ale v zmysle komplikovanosti a prácnosti výroby takého modulu. Kto si taký modul vyrobí? My a možno kamarát Bogdan  .
.
Optimálnym riešením by bolo, keby to celé bola záležitosť preflešovania Orange stabilizéra Rx3S. Lenže sú tu aj niektoré otázky ohľadne hardvérových obmedzení:
-
má procesor v RX3S ešte nejaké voľné vývody (vstup, výstup, reverzácia a nastavenie gyro-efektu ďalšieho stabilizovaného kanálu)?
-
má procesor ešte nejakú voľnú pamäť na spracovanie ďalšieho stabilizovaného kanálu?
-
čím nastavovať mieru stabilizácie a reverzáciu gyro-efektu?
-
čím sa budú nastavovať PID-hodnoty tohto „podvozkového“ kanálu?
-
bude potom treba zodpovedajúco upraviť aj softvér pre programovacie prípravky (dLUX, Aquastar, TGY160A)?
Nuž, toľko problémov a nejasností, že sme ani nemali odvahu tým Eda otravovať. Až začiatkom tohto roku som v telefonickom rozhovore Edovi „nadškrtol“ problematiku stabilizácie riadenia podvozkovej nohy a Edo pripustil, že až bude mať čas, tak sa skúsi pozrieť na onu „neprekonateľnosť“ hardvérových obmedzení.
Nerobil som si ilúzie a viac menej som očakával verdikt v zmysle: nie sú voľné piny, nie je voľná pamäť, …. nedá sa to  .
.
Lenže Eda len tak nejaké hardvérové obmedzenia nezlomia. Našiel riešenie všetkých piatich otázok spomínaných vyššie. Výsledkom je Flight Stabilizer verzie Ed_20.
Našiel potrebné voľné vývody procesora, „odpáraním“ nepoužívaných častí kódu ušetril potrebnú pamäť a vyriešil spôsob nastavovania a reverzovania stabilizačného účinku aj PID-hodnôt prídavného kanálu: pomocou programovacieho prípravku (ktorého firmvér Edo mimochodom tiež musel upraviť  ).
).
Signál riadenia podvozku sa z RC prijímača privedie do letového stabilizátora na vývod s označením SW Rud:
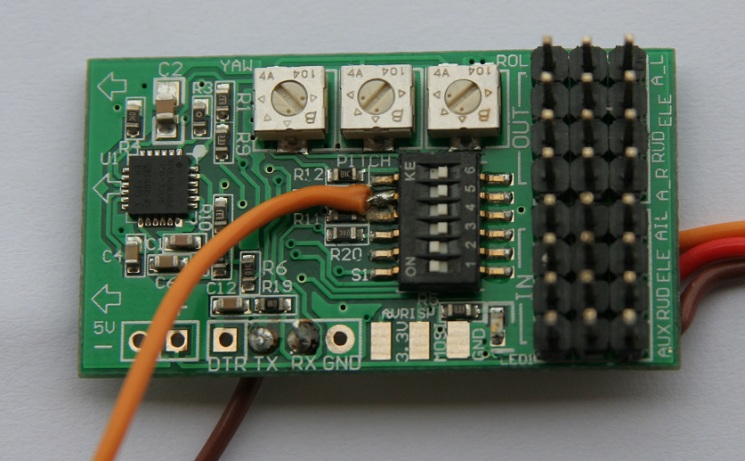
Výstupný signál pre servo riadenia podvozku sa vedie z vývodu označeného RX:
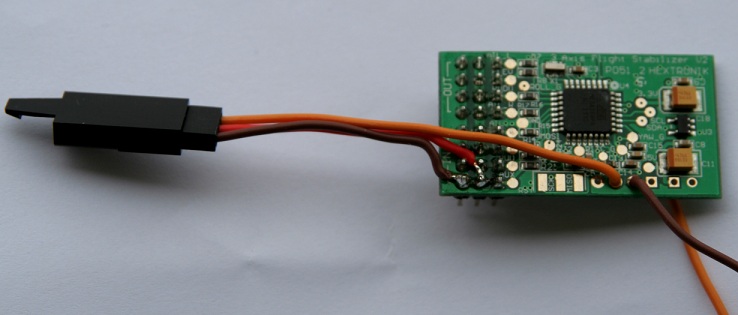
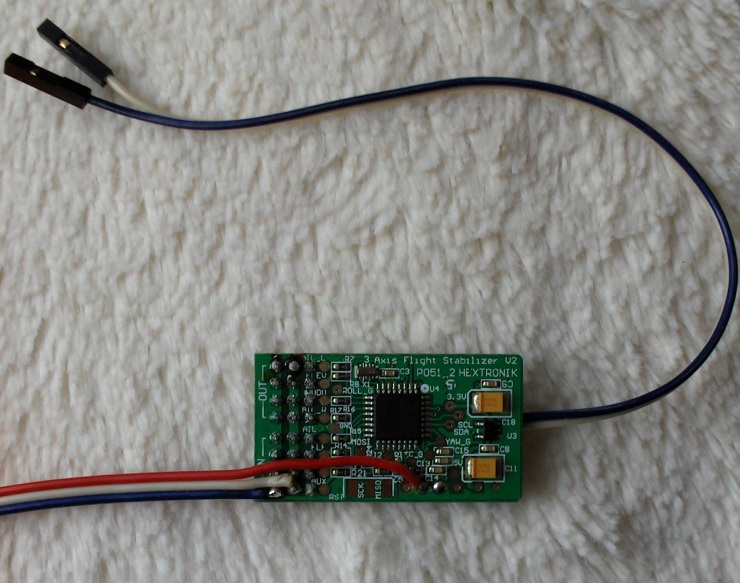
Farby 3-žilového servokáblika nezodpovedajú štandardu. Postupoval som metódou: "Akú mala, takú dala."
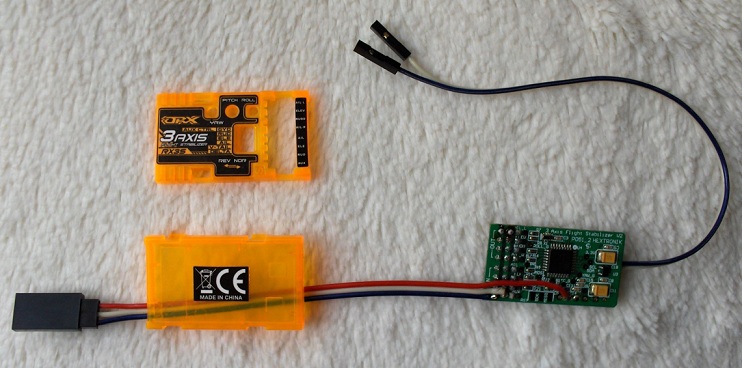
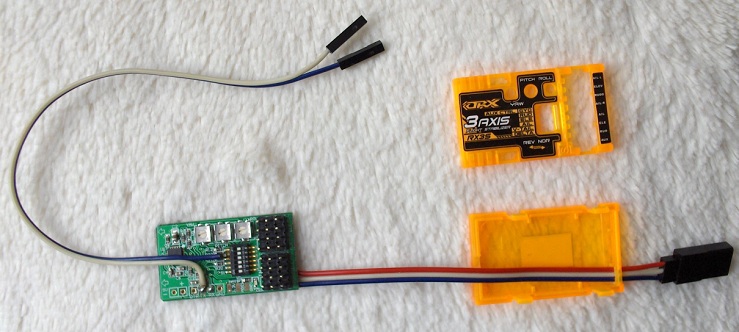
Do oranžovej krabičky je potrebné urobiť zodpovedajúce otvory a výrezy, prevliecť kábliky zakončené konektormi a potom to môže vyzerať aj takto:
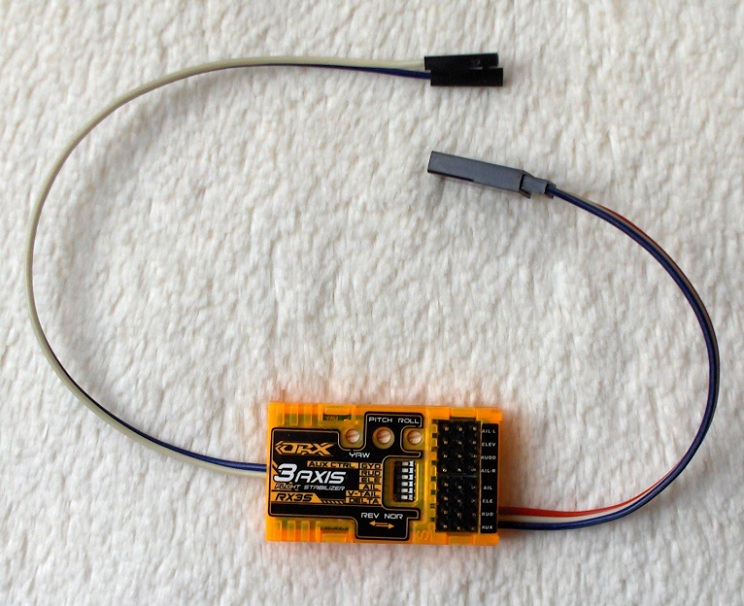
Po zavretí krabičky takto:
Na úspešné nastavovanie Flight Stabilizera verzie Ed_20 je nutné preflešovať aj Programovací prípravok (v našom prípade dLUX). Potom sa po pripojení napájania prihlási takouto úvodnou „obrazovkou“ (Edo vďaka, super  ):
):
Nastavenie Timera (vypínajúceho „gyrovanie“ podvozkovej nohy) je možné v krokoch: 10, 15, 20, 25, 30, 35 a 40 sekúnd. Ja som si nastavil 15 sekúnd:

Nastavenie reverzácie (znamienkom -) a účinnosti stabilizácie (tzv. Gyro-efektu) podvozkovej nohy je možné v rozsahu: -128 až 127:

PID-hodnoty pre režim Rate sú prednastavené na (pre nedostatok miesta na displeji je namiesto Steering zobrazené len Ste):

ale každú z nich je možné samozrejme zmeniť (a nenulovou hodnotou zložky „I“ je vlastne možné dosiahnuť stabilizáciu typu Hold).
PID-hodnoty pre režim Hold sú prednastavené na:
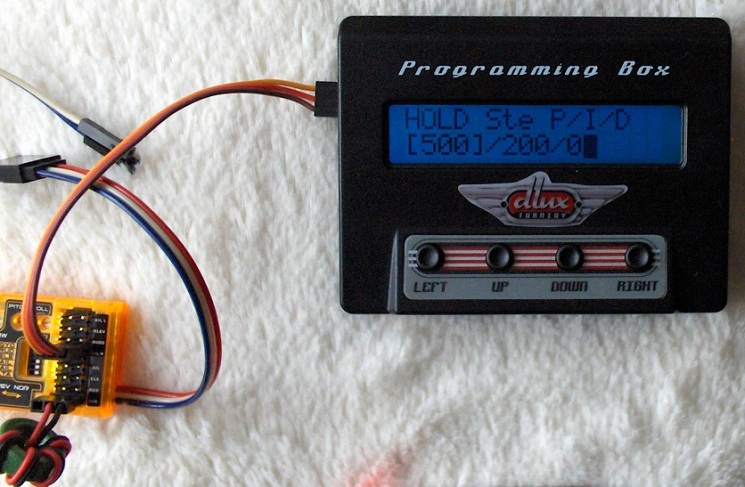
ale každú z nich je možné samozrejme zmeniť (a vynulovaním zložky „I“ je vlastne možné dosiahnuť stabilizáciu typu Rate).
Je zrejmé, že ak nevyužijem (alebo vôbec nezapojím vstup a výstup pre) kanál stabilizácie riadenia podvozkovej nohy, tak Flight Stabilizer verzie Ed_20 môžem použiť ako Flight Stabilizer verzie Ed_11. Na jeho nastavovanie pomocou Programovacieho prípravku (dLUX, Aquastar, TGY160A) však tento musí byť naflešovaný zodpovedajúcim firmvérom (ver. 20). Nie je možné nastavovať Open Stabilizer verzie Ed_10 a Ed_11 Programovacím prípravkom verzie 20 a naopak.
Vzhľadom na vykonané softvérové úpravy, musí byť časový sled kanálov (impulzov), prichádzajúcich z RC prijímača do letového stabilizátora Ed_20 taký, aby AUX_IN bol posledný kanál.
Sada predpripravených súborov na pohodlné preflešovanie letového stabilizátora RX3S na verziu firmvéru Ed_20 sa nachádza v sekcii Download alebo TU.
Súbory na preflešovanie aj iných typov letových stabilizátorov ale aj Programovacích prípravkov na verziu firmvéru Ed_20 sa nachádzajú v sekcii Download alebo TU.
<Staršie | tento článok | Novšie>
Napísané: 28. 3. 2016, 15:51 | Prečítané: 7080x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 10
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Do you have any documentation in english?
Thank you!
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
I wan to use it with double aileron.
Thank you.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Version ED_20 has programmed new pins for stabilizing wheel. Input signal is connected to SW_RUD. Switch SW_RUD must be set to NOR position.
Output signal for servo driving is connected to pin named as RX.
ED_20 version requires to program RX3V2 board and also programming box. Files are located in DOWNLOAD section.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Na ktorý kanál je namapovaný tento pridaný kanál v CPPM (resp. SBUS) sekvencii? Na ktoré gyro je naviazaný, na smerovkové? Ak by šlo vypnúť timer gyrovania nohy - steeringový kanál by sa negyroval (napr. s P/I/D = 0), ale fungoval by bez obmedzenia, nemohol by mať tento pridaný kanál všeobecnejšie využitie ?
RX3S V2 s Ed10 používam s CCPM vstupom (uvažujem o SBUS) a jeden kanál navyše by sa veľmi hodil. Podvozkový kanál je interne použitý na prepínanie módu stabilizácie, takže reálne je k dispozicii len 7 kanálov. Ôsmy klasický kanál by bol super!
V Ed20 je steringový výstup alokovaný na RX pin, lenže v origo OFS (aj v Ed10) je tu alokovaný sériový vstup. Znamená to, že Ed20 SBUS verziu nepodporuje? Ak, tak nebolo by výhodnejšie prehodiť ho na iný pin (napr. TX)?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Verzia č.20 bola vo verzii PWM testovaná niekoľko desiatok hodín, zatiaľ čo pre CPPM a SBUS to tak nebolo. Preto som tento týždeň zaobstaral FrSky prjímač s CPPM a aj SBUS výstupom. Dnes som skúšal verziu ED20_CPPM. Funguje ako má. Radenie vstupných kanálov je poradí "RETA1a2F" - t.j. smerovka, výškovka, plyn, krídelko ľavé, aux, krídelko pravé, koleso a posledný vstup je vyhradený pre klapky.
Výstupy (7 kanálov) sú radené podľa tabuľky pre OFS, t.j. na PB0 (Ail_IN) je CPPM, na PB1 (Ele_IN) je výstup klapiek, na PB2 (Rud_IN) je plyn, na PB3 (Aux_IN) je ovládanie kolesa, na PD4 (Ail_l_OUT) je krídelko ľavé, na PD5 (Ele_OUT) je výškovka, na PD6 (Rud_OUT) je smerovka a PD7 (Ail_r_OUT) je krídelko pravé.
Výstup pre koleso má po naflešovaní stabilizačnej jednotky hodnotu VR-Gain nastavenú na nulovú hodnotu a taktiež má vypnutý časovač. V tejto konfigurácii sa signál pre koleso prenáša zo vstupu na výstup bez korekcie PID. Takže je možne tento kanál využiť aj na iné účely.
Verzia ED_20_SBUS - bola taktiež otestovaná. Aby bolo (vôbec) nadviazané spojenie RX - RX3S, musel som signál z RX hardverovo invertovať. Spravil som to cez tranzistor a dva odpory. Spojenie bolo nakoniec nadviazané, ale vyskytli sa ďalšie nedostatky.
Odskúšaná bola aj ED_11_SBUS. Verzia č.11fungovala bez problémov.
Výsledok je teda taký, že verzia č.20 funguje spoľahlivo pre PWM a CPPM. Ale ak niekto chce za každú cenu používať SBUS, tak tam je momentálne lepšia verzia č.11.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
vďaka za bližší popis. Predpokladám, že to rozhodenie kanálov (REATA1a2F) a alokácia výstupov čo popisuješ platí len pre CPPM a SBUS verzie, a nie pre štandardnú verziu (Ed__v_c20_20160324_RX3S_V2.hex)? Tá by to mala mať tak ako píše Janko O. v článku, vrátane spájkovania na doske, či?
Ešte k tomu SBUS, táto zbernica počíta až s 16-timi proporcionálnymi kanálmi. Myslím si, že práve ten počet kanálov je zaujímavý a je hlavným (určite nie jediným) dôvodom, prečo to modelár použije. Pri 8-kanáloch je jednoduchšie použiť CPPM, pri viac než 8 kanáloch CPPM nestačí. Podľa toho čo píšeš, si v RX3SV2 obsadil AUX2 výstup, takže počet kanálov zostal stále 8 a reálne vlastne len 7 servových kanálov.
Zdalo sa mi zaujímavé "pridávaný" steeringový kanál (alebo aj ďalšie ak na to dôjde) prihodiť do SBUS protokolu (v rádiu) na pozíciu 9 resp. vyššie. Tvoj fw v zásade využiť aj ako SBUS dekodér.
Prečo to vôbec riešim? Lebo "tvoj" stabilizátor používam napr. aj vo vlečnej (FrSky+Taranis), kde by sa mi zopár kanálov navyše zišlo ako soľ (rud, ele, 2x aile, 2x flaps, steering, ovládanie vlečného háčika, rc-žhavenie, ovládanie osvetlenia) .Voľných portov na doske stabilizátora (TX, RX apod.) je dosť.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Tých "zopár" kanálov navyše pri CPPM je možne celkom elegantne vyriešiť. K Taranisu treba použiť X8R (prípadne X6R) a tento prijímač nabindovať s prepojenými prepojkami 1-2, 3-4. Vtedy sa (pri nastavenom mode D16) aktivuje 8 kanálov SBUS a ďalších 8 kanálov PWM je na pinoch X8R. Pomocou prevodníka odkaz sa spraví prevod na CPPM a takýto signál sa privedie na stabilizér. Verzia ED_20 CPPM má 7 kanálov PWM + 8 PWM je na výstupoch X8R. To už by malo stačiť.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
trochu si ma svojou odpoveďou predbehol, presne tak som to nakoniec aj urobil. K stabilizátorovským výstupom mi pribudlo ďalších 8 univerzálne použiteľných kanálov. Lenže som nepoužil CPPM verziu fw s prevodníkom SBUS->CPPM, ale priamo SBUS verziu Ed_11 (myslím že by to šlo aj s Ed-20).
Trošku sa mi nepozdávalo vyvádzať RX pin z dosky káblikom (riziko odtrhnutia ?). Navyše by som musel použiť externý SBUS invertovací kábel. V SBUS-ovej verzii fw je vstup AIL-IN nevyužitý - vyhradený je pre CPPM vstup (CPPM verziu fw). Preto som sa rozhodol použiť ho aj ako vstup pre SBUS. Na dosku som pridal 1 tranzistor a 2 odpory, čím som SBUS invertor zakomponoval priamo do dosky stabilizátora. Budený je zo spomínaného AIL-IN vstupu. K nemu pripájam priamo SBUS výstup z prijímača. Vstup je ale zároveň funkčný aj pre verziu fw s CPPM budením
 .
.
Úprava je možno trošku náročnejšia, lebo z dôvodu nízkeho profilu krabičky som musel použiť tranzistor v SMD púzdre. Ale pri troche trpezlivosti to šlo a mechanicky sa mi to zdá oveľa spoľahlivejšie. Ak by to niekoho zaujalo, mám k tomu obrázkový návod
 .
.
Ed a Cevarovci, ešte raz veľká vďaka!
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)