VýškoStat 2 (stabilizátor výšky letu): Praktické overenie
Vtedy sa štvrtáci „potia“ a ostatní študenti, aby ich nerušili, tak v škole nie sú.
To znamená, že ani jedni ani druhí nemajú telesnú.
A to znamená, že telocvičňa je vtedy prázdna.
A to teda znamená, že som mohol prakticky overiť vylepšený – dvojprocesorový stabilizátor výšky – VýškoStat 2.
autor: Janko O. Minulý týždeň prebehli na slovenských stredných školách maturitné písomky.
Minulý týždeň prebehli na slovenských stredných školách maturitné písomky.









Prvú (plne funkčnú) verziu VýškoStatu sme spomínali v článku „Model na vôdzke (vodítku): cesta ku stabilizátoru výšky (1)“ a jej praktické overenie v článku „Model na vôdzke (vodítku): stabilizátor výšky v činnosti (2)“. Prebehlo aj jej praktické overenie v telocvični na Murgaške (mimochodom: najlepšej strednej škole v BanskoBystrickom kraji), ale žiaľ, nemám z toho ani fotografie a ani žiadne video.
Všetko bolo OK, len mi vadilo, že nijako nebola signalizovaná aktivácia VýškoStatu. Aby ste rozumeli: stabilizáciu výšky (a „odchytenie“ jej referenčnej hodnoty) urobí pilot prepnutím toho správneho vypínača na vysielači. Ale z bezpečnostných dôvodov je program navrhnutý tak, že sa VýškoStat v určitých kritických situáciách sám deaktivuje (čo teraz vo Verzii 2 dáva najavo rýchlym blikaním) a výška modelu je tak opäť ovládaná manuálne – pilotom. Lenže: z dôvodu použitia „malého“ (8-vývodového) mikrokontroléra PIC12F683, som narazil na problém „nedostatku vývodov“. Skrátka: doplniť softvér o signalizáciu nebol problém; problémom bol hardvér – signalizačné LEDky nebolo kam pripojiť.
A tak vývoj VýškoStatu začal svoju druhú fázu: „prekopanie“ hardvéru na 18-pinový čip – konkrétne PIC16F88. Ten poskytoval „priehrštie“ voľných vývodov. Okrem hardvéru bolo treba „prekopať“ aj softvér, ale to nebol problém – išlo to rýchlo. Taktiež bolo treba na konce krídiel môjho CanadAira CL-84 nainštalovať vhodné signalizačné LED-svetlá. Zvolil som modré 3W LEDky: na každé krídlo po dve, navzájom zvierajúce uhol 90°. Keďže výstupy PIC mikrokontrolérov nedokážu dostatočne rozsvietiť takéto výkonné LEDky, bolo treba VýškoStat doplniť o výkonový obvod s Darlingtonovým tranzistorom TIP122, zapojeným súčasne aj ako stabilizátor prúdu (aby LEDky svietili rovnako, bez ohľadu na stav nabitia batérie).
Predbežné skúšky prebehli na „testovacej stolici“ v suteréne nášho domu. Sveteľná signalizácia fungovala tak ako mala, avšak pri podrobnej analýze signálu z ultrazukového modulu HC-SR04 sa prejavilo síce zriedkavé, cez to všetko však znepokojujúce „zabrhlávanie“ motorov (kratulinký pokles otáčok). Dôvodom je charakter analógového signálu, ktorý musí výškomerný modul spracovávať. Krásne to vidno na nasledujúcom videu, ktoré zachycuje výrazné kolísanie amplitúdy odrazeného signálu modulu HC-SR04:
Video: VýškoStat - signál z ultrazvukového senzora
Po spracovaní tohto signálu a jeho prevedení na impulzy, ktorých šírka zodpovedá výške modelu nad zemou, bolo vysvetlené aj ono „zabrhlávanie“: V určitom okamihu (na nasledujúcom videu v 6. sekunde) je generovaný „nenormálne“ dlhý impulz, ktorého šírka isto nezodpovedá výške modelu nad zemou:
Video: VýškoStat: šírka impulzu zodpovedá výške modelu nad zemou
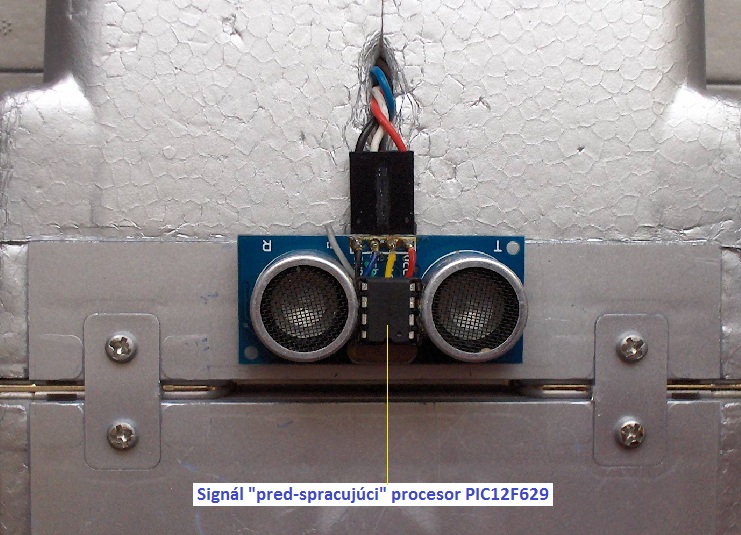
Po realizácii množstva ďalších meraní a testov bolo rozhodnuté: VýškoStat 2 sa bude skladať z dvoch mikrokontrolérov. Jeden (PIC12F629) bude LEN merať výšku modelu nad zemou a štatistickým spracovaním vyberať správne hodnoty dĺžky impulzov a korigovať, či eleminovať nesprávne hodnoty dĺžky impulzov z ultrazvukového modulu HC-SR04 (niekedy sa takáto procedúra nazýva Signal Processing).
Druhý procesor (mikrokontrolér) si na „požiadanie“ vyzdvihne predspracované hodnoty z prvého procesora a ďalej sa bude venovať LEN samotnému udržiavaniu nastavenej výšky modelu nad zemou.
Komunikáciu medzi procesormi som sa rozhodol realizovať ako jednovodičovú. Keďže klasická sériová komunikácia (RS-232), ale aj komunikácia OneWire vyžadujú, aby boli procesory presne taktované, vymyslel som si radšej vlastný prenosový protokol, ktorému je nesynchrónnosť taktu oboch procesorov ľahostajná.
Tým, že som použil jednovodičovú komunikáciu medzi procesormi, namiesto pôvodne dvojvodičovej (Trig a Echo) medzi procesorom a ultrazvukovým modulom, uvoľnil sa mi jeden potrebný pin procesora a vrátil som sa k tomu, že samotný VýškoStat 2 je realizovaný opäť „malým“ 8-pinovým mikrokontrolérom PIC12F683. Jedným z dôvodov bolo aj to, že už som mal z Verzie 1 v modeli pripravené lôžko pre modul stabilizácie výšky s „malým“ procesorom.
Ešte niekoľko dní po vyjasnení podoby hardvéru, vybíjal som sa na „vyčačkaní“ samotného programu VýškoStatu 2: už z Verzie 1 mi vyšla ako najlepšia regulácia (výšky, teda ťahu motorov) typu PD (Proporcionálna s Derivačným urýchlením procesu), avšak doplnená o zložku, ktorej som dal meno: Tendencia.
Vzhľadom na pomerne významnú hmotnosť modelu, trochu „lekvárový“ charakter ťahu motorov a pružný charakter vzduchového „vankúša“ pod modelom sa ukázalo ako potrebné, výpočtom stanoviť tendenciu (vertikálneho) pohybu modelu. Príklad: Uznáte, že je iné (dobré) ak sa model blíži k nastavenej výške a jeho vertikálna rýchlosť klesá, a iné (zlé) ak sa model blíži k nastavenej výške a jeho vertikálna rýchlosť stúpa. Vtedy sú hodnoty zložiek P (úmerné odchýlke výšky) aj D (úmerné derivácii odchýlky výšky, čiže (vertikálnej) rýchlosti) takpovediac „nič nehovoriace“.
Po mnohých testoch na „testovacej stolici“ (čiže na „bakuli“) sa podarilo softvér „Signal Processingu“ v mikrokontroléri PIC12F629 zdokonaliť:
Video: Výškostat 2: signál bez výpadkov
Dokonca tak, že VýškoStat 2 pracoval aj nad (zvuk-pohlcujúcim) kobercom, čo pri Verzii 1 nepripadalo do úvahy.
A tak som po dohode s vedením školy, v stredu 16.2.2016 v telocvični na Murgaške absolvoval praktické overenie funkcie VýškoStatu 2. Vzal som si aj tablet a tak si z toho môžete pozrieť krátke videá:
Video: CanadAir CL-84: s VýškoStatom 1
Video: CanadAir CL-84: s VýškoStatom 2
Video: CanadAir CL-84: s VýškoStatom 3
Video: CanadAir CL-84: s VýškoStatom 4
<Staršie | tento článok | Novšie>
Napísané: 22. 3. 2016, 11:15 | Prečítané: 5641x | Kategórie: Denník | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)