AssOrx: Funkcia a vlastnosti
Uviedli sme, že v ďalšom (tomto) článku v tom budeme pokračovať. Ale aký mu dať nadpis? AssOrx: schéma zapojenia - 3. časť? Asi nie.
A tak sme zvolili nový nadpis.
No a keďže toto je článok o funkcii a vlastnostiach AssOrxu, tak aby to bolo pekne pokope, znovu uvedieme tie už tie spomínané v minulom článku a samozrejme doplníme ďalšie, ešte neuvedené.
autor: Janko O. V minulom článku o AssOrxe (AssOrx: schéma zapojenia - 2. časť) sme sa začali venovať aj jeho funkcii a vlastnostiam.
V minulom článku o AssOrxe (AssOrx: schéma zapojenia - 2. časť) sme sa začali venovať aj jeho funkcii a vlastnostiam.









Ako sa náš AssOrx správa, čo má spoločné s pôvodným Orange Flight Stabilizerom, v čom sa podobá na FY-30A či Guardian 2D/3D a v čom sa od nich odlišuje?
Samozrejme, vychádzali sme z vlastných dobrých skúseností s používaním gýr v modeloch lietadiel. Neskôr sme „gyro-efekt“ (zisk gýr) diaľkovo menili v závislosti od polohy riadiacich pák a vzniklo Dynamické riadenie gýr. Výrobcovia modelárskeho príslušenstva začali jednotlivé gyrá „integrovať“ do jedného zariadenia a vznikli 3-axis Flight Stabilizery, ako napríklad náš obľúbený Orange Flight Stabilizer. Žiaľ, diaľkové (plynulé) ovládanie „gyro-efektu“ väčšinou nemajú a samostane, pre každú os, už vôbec nie. A tak tu naše Dynamické riadenie nemalo šancu, čo sme chápali ako krok späť.
Neskôr sa objavili Autostabilizačné systémy ako FY-30A a Guardian 2D/3D (a samozrejme aj iné), ktoré síce stabilitu modelov posunuli na vyššiu úroveň (použitím systému absolútnej stabilizácie - 3D mód) a boli pre nás spočiatku vzorom, avšak ani ony nemali dynamické riadenie stabilizačného účinku a navyše sa u nich objavili nové (pre nás dovtedy neznáme) „necnosti“. Napr. pri miernom vychýlení riadiacej páky zo stredovej polohy systém vypol režim „absolútnej“ stabilizácie a zostal len režim „relatívnej“ stabilizácie (klasické „gyrovanie“). Pritom však model sebou neprirodzene trhol a v podstate skokom mierne zmenil trajektóriu letu (či už smerovo ale bohužiaľ aj výškovo).
Okrem toho, ani Orange Flight Stabilizer a ani FY-30A nemajú možnosť samostatného (a pritom „gyrovaného“) ovládania krídeliek (Guardian 2D/3D to má) a o samostatnom „gyrovanom“ ovládaní predného kolesa (nezávisle od smerovky) ani nesnívajú. Ale my s Miroslavom sme o tom stále snívali. A tak bolo jasné, že s tým treba niečo urobiť.
Orange Flight Stabilizer sme zvolili ako základ pre jeho mnohé veľmi dobré vlastnosti (relatívne malé „kvantovanie“, nízka cena, na rozdiel od mnohých iných je „zapúzdrený“ v pre AssOrx využiteľnej krabičke, …). Má však jednu nepríjemnú necnosť: jemné chvenie serv a to aj vtedy, keď je „gyrovanie“ vypnuté. Toto bola prvá úloha, ktorú bolo treba vyriešiť: chvenie softvérovo odstrániť, bez citeľného negatívneho dopadu na latenciu, presnosť a jemnosť „gyrovania“. Podarilo sa, AssOrx nechveje, drží ako pribitý.
Dynamické riadenie je interné, bez potreby samostatného ovládacieho kanálu. A samozrejme pre každú os samostatné, nezávislé. 100-stupňová Dynamika gyrovania je neustále vypočítavaná z aktuálnej polohy tej-ktorej riadiacej páky a jej stredovej polohy. Tá je zistená tesne po zapnutí v procese kalibrácie. Preto: niekoľko sekúnd po zapnutí musia byť riadiace páky v neutrále a model v absolútnom kľude.
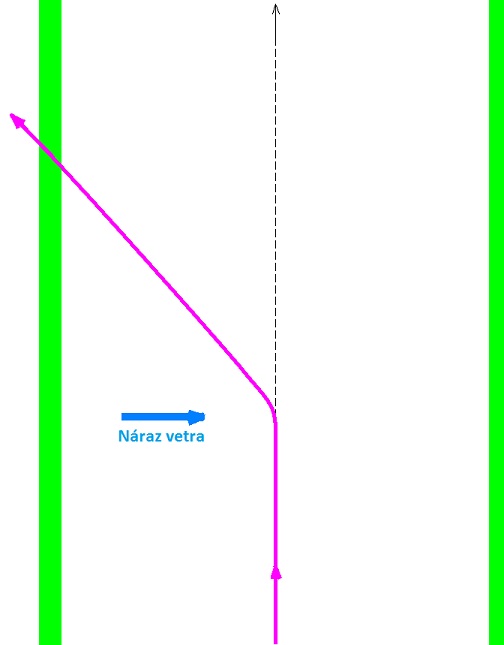
Praktickými skúškami sme overili, že model bez akéhokoľvek stabilizačného systému na poryv vetra reaguje napr. takto:
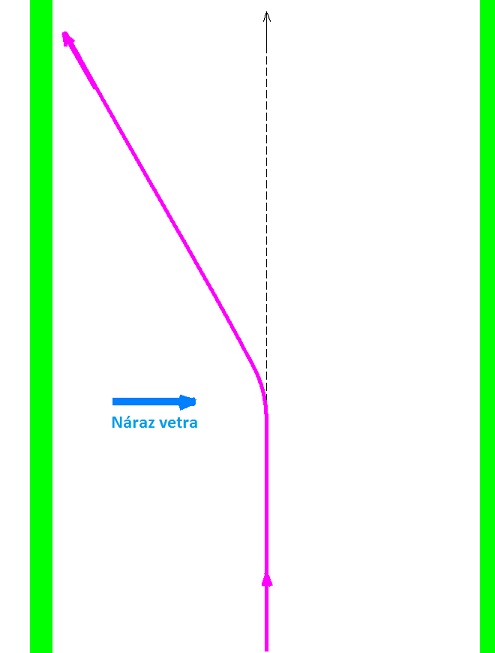
Ak je na stabilizáciu použité gyro alebo hoci aj 3-osový stabilizačný systém, ktorý len „gyruje“, čiže robí len relatívnu stabilizáciu (nemá Head Lock, či Attitude Lock), tak na poryv vetra reaguje napr. takto:
Zvýšením citlivosti (zisku) gyra či stabilizačného systému môžeme situáciu ešte viac zlepšiť,
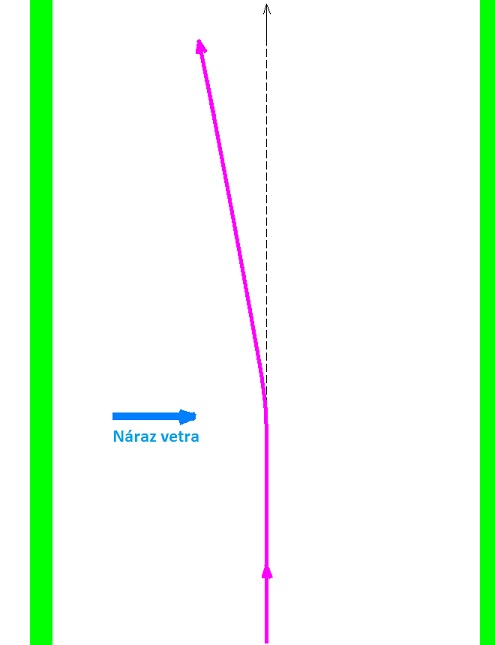
ale model sa sám nevráti do pôvodného smeru. Nulové vychýlenie modelu (pri poryve vetra) z pôvodného smeru by sa TEORETICKY dalo dosiahnuť tým, že by sme citlivosť (zisk) stabilizačného systému nastavili na nekonečne veľkú hodnotu. Ale keďže takýto stabilizačný systém funguje ako záporná elektromechanická spätná väzba, tak by na (žiadanú - chcenú) zmenu smeru letu modelu bola treba nekonečne veľká výchylka riadiacej páky. Už Albert Einstein vedel, že s nekonečnom bývajú „drobné“ problémy a my tu teraz máme hneď nekonečná dve  .
.
Aby bolo možné nastaviť dostatočný zisk stabilizačného systému a tento sa súčasne s pilotom „nepretláčal“ o to, kto viac vplýva na to, kam model vlastne bude letieť, tak sme už asi pred štyrmi rokmi v našich, gyrami vybavených, modeloch zaviedli DYNAMICKÉ RIADENIE GÝR. Jeho funkcia je taká, že ak je riadiaca páka (knipel) v neutrále, tak stabilitu modelu zaisťuje gyro (stabilizačný systém) maximálnou mierou. Čím viac pilot pôsobí na riadiacu páku, tým menej stabilizačný systém zasahuje do riadenia modelu. Pri knipli v krajnej polohe je stabilizačný účinok gyra nulový a pilot má model plne v moci, vrátane akejkoľvek akrobacie.
Na potvrdenie toho, že dynamické riadenie gýr nie je nezmysel, sme použili vyjadrenie nezainteresovaného: Ing. Michal Černý v časopise RC revue č. 8 / 2013 na stane 14, v článku „Stabilizační systém Hype X3-Control“ (okrem iného) píše:
„X-3 Control pracuje jako standardní tříosé gyro, v tomto smyslu se velmi podobá gyru Orange RX3S, jinak je ale mezi jejich projevy propastný rozdíl.
Zásadní rozdíl oproti Orange RX3S je v tom, že podobně jako AS3X tento systém nijak neomezuje akrobacii, pilot se s účinky gyra za letu „nepere“ (nebije). Stabilizace v té ose, v níž přichází povel k výraznější výchylce kormidla, se omezuje a možná i vypíná. To vše ukazuje na to, že X3-Control toho umí ve skutečnosti výrazně víc, než jak jej výrobce v návodu představuje.“
Vetu: „Stabilizace v té ose, v níž přichází povel k výraznější výchylce kormidla, se omezuje a možná i vypíná“ by sme do našej technickej reči preložili, že X3-Control má (na rozdiel od Orange RX3S) dynamické riadenie gyro-účinku. A ako vidno, tak na autora článku to urobilo veľký dojem..
Aby sa však model po poryve vetra vrátil do pôvodného smeru, tak ako je to na nasledujúcom obrázku,
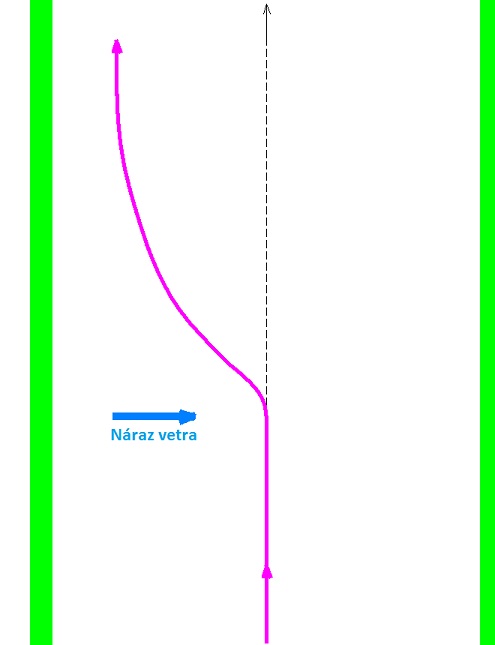
tak stabilizačný systém okrem relatívnej stabilizácie, musí mať aj absolútnu stabilizáciu (Head Lock, Attitude Lock). Systémy FY-30A a Guardian 2D/3D takúto stabilizáciu majú, ale
- 1. využívajú na to 3-osové akcelerometre
- 2. pásmo činnosti absolútnej stabilizácie je statické (pevne dané, nemenné)
Ad 1.
Náš AssOrx akcelerometre nemá, pretože využívame Orange Flight Stabilizer (Orange RX3S). Funkciu akcelerometrov nahrádzame tak, že hodnotu „gyro-efektu“ získanú výpočtom zo vstupného a výstupného signálu Orange RX3S integrujeme v čase. Áno, nie je to presne to isté, ako keď sa použijú akcelerometre, ale pre naše modelárske účely je to metóda plne vyhovujúca. Prečo?
Stabilizačné systémy s akcelerometrami majú opodstatnenie v modeloch s FPV (a obdobné systémy v skutočných lietadlách), kde takýto model (alebo skutočné lietadlo) prevažne (dlhé minúty, skutočné lietadlo až hodiny) letí rovno a len zriedka a krátko (rádovo sekundy, skutočné lietadlo minúty)) zatáča - mení smer.
Pri bežných modeloch je to však presne naopak: tie väčšinu letu letia v zákrutách a rovno letia len niekoľko (desiatok) sekúnd (závisí od rýchlosti modelu). Nepoznám bežného rekreačného modelára, ktorý by nechal model letieť bez zásahu do riadenia hoci len jedinú minútu.
Ad 2.
Na systémoch FY-30A a Guardian 2D/3D nám vadí to, že ak je riadiaca páka v určitom (relatívne úzkom) pásme okolo neutrálu, tak systém prejde do režimu absolútnej stabilizácie (napr. pri výškovke: aktuálny sklon modelu udržiava „za každú cenu“). Ak však chcete model MIERNE pritiahnuť alebo potlačiť, tak na MIERNE pohyby riadiacej páky vôbec nereaguje. Však je v pásme činnosti (zachytenia) absolútnej stabilizácie.
Ak však s pákou pohnete VIAC (mimo pásmo absolútnej stabilizácie), tak systém absolútnu stabilizáciu vypne a model „skokom“ zmení polohu (v tomto prípade) výškovky, teraz už zodpovedajúcu polohe knipla. To má za následok trhnutie modelom, ktoré však vôbec nemusí byť jemné, však ste s pákou pohli VIAC.
Túto necnosť sme v AssOrxe vyriešili tak, že vlastne neexistuje žiadne pevné pásmo absolútnej stabilizácie. Do hry opäť vstupuje tzv. Dynamika. Tá ovplyvňuje nie len už zmieňovanú relatívnu stabilizáciu (dynamické riadenie gyro-účinku), ale aj absolútnu stabilizáciu (dynamické riadenie hodnoty Integrálu) a navyše aj dynamické riadenie rýchlosti zmeny hodnoty Integrálu.
Čo to v praxi znamená?
Ak je riadiaca páka v neutrále, tak systém sa správa rovnako ako FY-30A, či Guardian 2D/3D, čiže (napr. pri výškovke: daný sklon modelu udržiava „za každú cenu“). Keďže „naša“ Dynamika je 100-stupňová, tak už pri veľmi malom vychýlení (menej ako pol stupňa) riadiacej páky (knipla) začne výškovka opúšťať predchádzajúcu polohu a POMALY - PLYNULE prechádza do polohy danej aktuálnou polohou knipla. Rýchlosť prechodu z jednej polohy do druhej je daná Dynamikou. Čím bližšie je riadiaca páka k neutrálu, tým pomalšie sa presúva (rádovo sekundy). Čím bližšie je riadiaca páka ku svojej krajnej polohe, tým rýchlejšie mení výškovka svoju polohu. V krajnej polohe knipla je POMALosť – PLYNULosť pohybu výškovky nulová.
Na uvedených príkladoch sme spomínali výškovku, ale AssOrx je 3-osový, takže rovnako sa správa pri ovládaní krídeliek a smerovky (vo verzii 3-3-3). Správanie verzie 5-3-5 bude popísané v inom článku.
Šírka servo-impulzov, vychádzajúcich z AssOrxu, je obmedzená tak, aby neboli kratšie ako 800 mikrosekúnd a dlhšie ako 2200 mikrosekúnd.
Mnohé „koeficienty“, ovplyvňujúce správanie AssOrxu (napr.: Derivačná konštatnta, Integračná konštatnta, Zotrvačnosť Integrálu, ...), sú nastaviteľné, čím je možné systém „vyladiť“ - prispôsobiť individuálnym potrebám pilota či toho-ktorého modelu.
Súvisiace články:
AssOrx: schéma zapojenia - 2. časť
AssOrx: schéma zapojenia - 1. časť
(Auto-)Stabilizačný Systém AssOrx pred skúškami
Dynamické riadenie gýr v modeloch lietadiel
Použitie gýr v modeloch lietadiel - 2.časť
Použitie gýr v modeloch lietadiel - 1.časť
Zisťovanie vlastností gýr – 3. časť
Zisťovanie vlastností gýr – 2. časť
Zisťovanie vlastností gýr – 1. časť
<Staršie | tento článok | Novšie>
Napísané: 6. 10. 2013, 14:43 | Prečítané: 9594x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 2
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Že to má zmysel, sa snažíme dokázať už niekoľko rokov (viď článok Dynamické riadenie gýr).
V uplynulých dňoch (nedeľa, pondelok, utorok a streda) prebehli praktické skúšky AssOrxu a musím povedať, že rozdiel medzi ním a neupraveným Orange Flight Stabilizerom je obrovský. Tu hrá samozrejme rolu ešte aj "absolútna" stabilizácia modelu, ktorú pôvodný Orange Flight Stabilizer nemá.
Diaľkové ovládanie gyro-efektu samostatným kanálom samozrejme význam má, ale to dynamické ovládanie tam dať mohli. Zatiaľ to má jedine (podľa článku Ing. Černého) len ten X-3 Control. Navyše nevieme presne ako to X-3 má, lebo Ing. Černý to bližšie nešpecifikuje.
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)