Robotika v modelárstve
autor: vpershing
pridal: mior
______________________________________
Poznámka Janka O.:
Ako vždy, skvelý článok - nadčasový. Vladko, vďaka. K tejto myšlienke ma priviedol môj 17-ročný syn, ktorý sa pred nejakým časom naučil "lietať" (http://vimeo.com/13080368). Ledva nastúpil na elektro priemyslovku, začal sa v tom vynikajúco orientovať. A po pár lietaniach sa ma pýtal:
"A nevedelo by to letieť samo? Veď techniku na to už máme...."
K tejto myšlienke ma priviedol môj 17-ročný syn, ktorý sa pred nejakým časom naučil "lietať" (http://vimeo.com/13080368). Ledva nastúpil na elektro priemyslovku, začal sa v tom vynikajúco orientovať. A po pár lietaniach sa ma pýtal:
"A nevedelo by to letieť samo? Veď techniku na to už máme...."









Takže páni, naučení lietať na tranzistorových rádiách, musíme si priznať, že po pojmoch ako digitálne servá, 2,4Ghz DSM, nano LiPol batérie, brushless motory, plne programovateľné vysielače http://rcmodely.cevaro.sk/index.php?id=246, alebo telemetria a FPV sa musíme prispôsobiť aj tomu, že nastupuje nová éra - robotika v modeloch.
Ako neskutočné nám pripadali prvé články o prvých bezpilotných armádnych lietadlách. S takým zázemím, aké im je dopriate si to však väčšina predstaviť vie. Čo však my bežní modelári? Zbežný dotaz cez Google nám však napovie, že dnes už podobné projekty existujú. A to od plne akademických (vysoké školy v USA ale už aj na Slovensku) až po naprosto amatérske napr. http://code.google.com/p/ro-4-copter/
Stačí si pozrieť pár stránok (drobný výňatok z mojich záložiek):
http://www.elenafrancesco.org/arduino/baronpilot/
http://www.rcalbum.com/index.php?action=dtl&amode=&id=5021&lng=1
http://www.kkmulticopter.com/index.php
a mnoho ďalších aj z odkazov z nich.
Celkom pekne je to zhrnuté na http://www.rcgroups.com/forums/showthread.php?t=1097355
Čo však s tým môže urobiť bežný slovenský modelár s obmedzeným domácim rozpočtom?
Niektoré veci sú aj komerčne dostupné na http://www.elektromodely.com . To sa ale týka hlavne tých, čo radi nakupujú a menej študujú  .
.
Nuž po dôkladnom preštudovaní väčšiny spomenutých odkazov sa pokúsim odpovedať, ako na to:
Začalo to tým, že ma syn žiadal, aby som ho naučil programovať tie šváby, čo sa mi na stole povaľujú. Rozhodol som sa teda čo sa len dá naštudovať
A vybral som mu za vynikajúce vysvedčenie za 1.polrok vývojový systém Arduino.
Po prvých pokusoch s LED, potenciometrami, LCD displejom alebo sériovom prenose údajov už vedel ako na to.
A tak sa hneď s kamarátmi pustil do ďalšej výzvy - programovaniu autonómnych robotov http://vimeo.com/20958292
Keď sa jeho tím vrátil z celoštátnej súťaže s prvou cenou, bolo to jasné (ak počítate čas, naozaj sa jedná o obdobie 2 mesiacov, tá mládež je skutočne vyspelá), že urobíme niečo autonómne aj vo vzduchu....
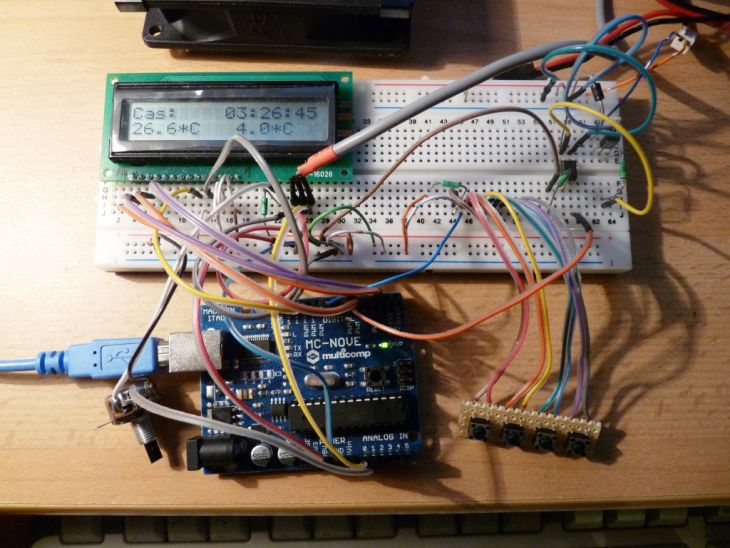
Najskôr sme postavili ďalšie Arduina...

Cesta k lietajúcemu robotovi je však nesmierne ťažká a zložitá (odhliadnuc od kúpenia toho ako celku).
V prvom rade je treba definovať "autonómnosť" modelu - jednoducho povedané kam až vieme dospieť k nej. Základnou je stabilizácia polohy či už letiaceho alebo visiaceho modelu. K tomu účelu sa používajú už dávnejšie gyroskopy, reagujúce na zmenu v niektorej z osí a vyvolávajúce reakciu na jej vyrovnanie. Pri bežnom lietadle ich použitie má od autonómnosti hodne ďaleko, používa sa hlavne na elimináciu vplyvov poryvov vetra a podobne.
Tu teraz oddelím lietajúce modely od tzv. aj visiacich (vrtuľníkov). U lietadiel je samozrejme dôležitá aj dopredná rýchlosť zaisťujúca vztlak nosných plôch a preto by bolo potrebné sledovať aj ju.
Vrtuľníky sú na tom lepšie. U nich túto veličinu snímať netreba. A tak v prvom priblížení k autonómnosti volíme vrtuľový model.
Reagovať však na akúkoľvek zmenu podmienok sa u neho dá jedine menením nastavenia vrtuľového kompletu, ktorého mechanická časť je však tou najnáročnejšou a aj najdrahšou vecou na celom systéme.
Obísť sa to dá viacrotorovým systémom.

Existuje mnoho riešení - od trikoptera s 3 vrtuľovými rotormi (jeden z nich osovo natáčateľný) až po oktokopter s ôsmimi rotormi... Pri voľbe typu tu rozhoduje hlavne nosnosť samotného systému (daná pomerom medzi hmotnosťou zariadenia a úžitkovou hmotnosťou) pri danom type napájania. Viac motorov - väčší vztlak ale za cenu väčšieho odberu energie. Každý motor naviac totižto aj niečo váži a aj niečo spotrebuje...
Okrem toho je pri voľbe dôležitá aj celková požadovaná funkcia - simulácia náhodných UFO pohybov alebo naprosto kľudný let so zavesenou HD kamerou...
Nuž a k tomu pristupuje samotné riadenie. Riadiť napr. 4 motorový QaudCopter každý motor jedným kanálom... Rád by som videl toho čo to skúsi.
Preto tu nastupuje riadiaci počítač.
A k nemu samozrejme aj príslušné snímače. A tu sa dostávame k podstate názvu tohoto článku - robotike. Na začiatok stačia 3ks jednoosých gyroskopov (alebo 1 troj-osý)
zaisťujúce stabilizáciu vo vodorovnej hladine. K nemu dodatočne môžeme zapojiť akcelerometre, magnetometre, GPS, barometrické snímače, ultrazvukové snímače vzdialenosti, infračervené snímače vzdialenosti, umelé horizonty, pitotove trubice, a ďalšie. Nuž a potom je už len na programe, ako si s nimi poradí. A k tomu treba prirátať aj neštandardné požiadavky na akčné členy - motory a ich regulátory. Bežné BLC pracujú s obvyklou opakovacou frekvenciou 50Hz (20ms perióda). To je však dlhá doba na okamžitú reakciu - niektoré systémy (preprogramované z riadenia PPM signálom na I2C riadenie) pracujú s 500Hz.
http://www.youtube.com/watch?v=4bTa7vpllh4&feature=player_embedded#at=33
A samotné motory - nesmú sa rozkmitať v celom rozsahu otáčok a hlavne ani pri ich zmene. A vybrať k tomu ďalej správnu vrtuľu, aby mala dostatočne rýchlu odozvu na zmenu otáčok ale aj dostatočný ťah... Navyše v niektorých typoch koptérov sú potrebné aj vrtule s opačným smerom otáčania...
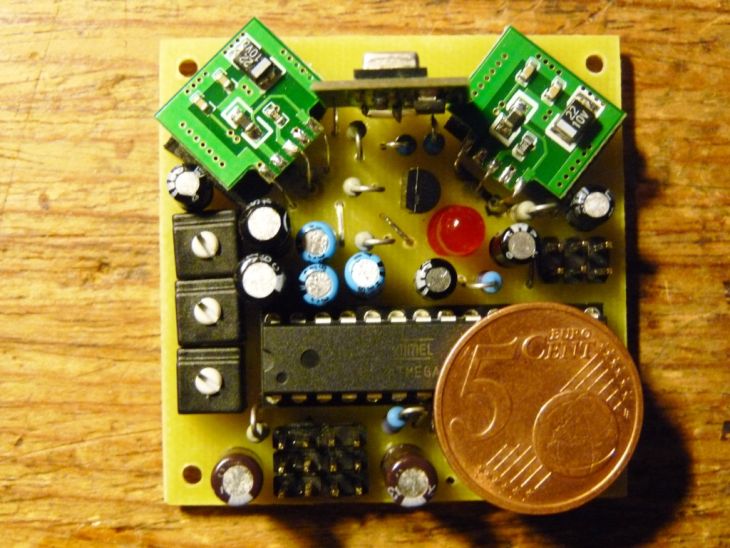
Pokiaľ teda máme všetko preštudované, máme dostatok trpezlivosti a hlavne odhodlania (a aj nejaký rozpočet) , môžeme sa nakoniec o niečo podobné pokúsiť:
Takže robotika v modeloch? Áno, pomaly ale isto. Už sú prototypy, ktoré dokážu model presunúť po určitej trajektórii na dané miesto, vykonať tam činnosť a vrátiť sa nazad na miesto štartu len na základe predprogramovaných činností. Nuž a to je predstava môjho syna o modelárstve....
vpershing
<Staršie | tento článok | Novšie>
Napísané: 28. 2. 2013, 18:08 | Prečítané: 12010x | Kategórie: Elektronika | Napísal: mior |
Komentáre: 7
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Má nejaký web, kde by som sa mohol dozvedieť viac?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
"Keď šikovný chlapec má šikovného otca, ktorý sa mu venuje, ..... tak potom dokážu báječné veci".
Vpershing má takýchto synov troch ..... (najstarší je už zamestnaný v Googli).
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)