Vízia 2019: Kibicovať a varovať
A aby sme to viac konkretizovali, tak nadpis neznamená, že v tomto roku nebudeme lietať, ale o to viac budeme ostatným modelárom do pilotovania kibicovať, prípadne ich nejako varovať. Kibicovať a varovať, to je (bude) úloha novej bezpečnostnej stratégie našej PC Telemetrie.
Takže na rovinu: Kibicovať (nám) a varovať (nás) bude naša PC Telemetria. A to všetko preto, aby sme zvýšili bezpečnosť našich modelov a samozrejme všetkého živého, čo sa môže nachádzať v dosahu našich lietajúcich strojov.
autor: Janko O. Ak sa vám to zdá byť nezrozumiteľné, tak vedzte, že to nebol úmysel. Skôr sme nenašli stručné a jasné vyjadrenie našich zámerov na rok 2019.
Ak sa vám to zdá byť nezrozumiteľné, tak vedzte, že to nebol úmysel. Skôr sme nenašli stručné a jasné vyjadrenie našich zámerov na rok 2019.









O našich zámeroch sme vás už predbežne informovali v článku „My sme na zimu pripravení! Je aj zima pripravená na nás?“ Konkrétne píšeme:
Pre rok 2019 sme si totiž stanovili úlohu, zaviesť do elektroniky našich modelov akýsi vyšší level bezpečnosti, prostredníctvom Letových asistenčných systémov a nejakej „drobnej“ palubnej automatizácie. Pojem Letový asistenčný systém je možno príliš vznešený, pojem Letový asistent toho zase veľa neprezradí a tak asi najvýstižnejší bude taký trochu znevažujúci pojem: Letový (asistenčný) kibic.
„Drobná“ palubná automatizácia má zase za úlohu odbremeniť pilota od niektorých činností, ktoré môžu odpútavať jeho pozornosť od toho najdôležitejšieho: od riadenia modelu.
K ich realizácii nás (do)viedli niektoré tohtoročné neblahé skúsenosti, teda havárie modelov, prípadne „horúce chvíle“, kedy k havárii chýbal len krôčik. S Miroslavom sme tieto nehody dlho a opakovane analyzovali a dospeli sme k záveru, že keby vtedy bol pri pilotovi nejaký pozorný „kibic“, prípadne keby sa niektoré úkony „urobili samé“, tak by sa nehody nestali.
Za výraz „kibic“ môže môj bývalý kolega, ktorý ho rád používal a ja sa priznám, že sa mi ten výraz zapáčil: je krátky a v podstate výstižný.
My sme Letového asistenčného „kibica“ v našej PC Telemetrii rozdelili na:
1. automatické spustenie hlásenia rýchlosti modelu, ak sa tento dostane do rozsahu kritických rýchlostí. Tu je výraz Letový asistenčný kibic naozaj na mieste, pretože je to podobné, ako keď tesne pri vás stojí nejaký „kecálek“, ktorý sleduje ako lietate a súčasne sleduje displej vašej telemetrie. A ak ste mu predtým povedali, aká je kritická (pádová) rýchlosť vášho modelu, nečudujte sa, ak vás (bez toho, aby ste ho o to požiadali) začne „láskavo“ upozorňovať, že rýchlosť vášho modelu je „proklatě nízka“, či blízko pádovej. Na druhú stranu, keď sa to tak vezme, jeho kibicovanie vám môže zachrániť model  .
.
Samozrejme sme sa snažili „ošetriť“ aj stavy, keď model štartuje, prípadne roluje po dráhe, aby kibic svojimi „pindami“ pilota zase zbytočne neotravoval.
2. varovanie pritiahnutej výškovky. Tu asi musíme rozviesť, čo to znamená a čo nás k tomu priviedlo. Mnohokrát som si všimol, že v určitých situáciách má pilot modelu tendenciu akosi podvedome priťahovať výškovku, hoci na to nie je rozumný dôvod. Typicky sa to deje pri priblížení na pristátie, kedy model dokončí poslednú zákrutu a potom má už len pomaly klesať a dosadnúť. Avšak po zrovnaní modelu na konci zákruty, naraz model mierne stúpne – urobí vlnku. Všimol som si, že to robím nielen ja, ale aj mnohí iní modelári. Dôvodom je asi to, že zákrutu robí model v bočnom náklone, pri (mierne) pritiahnutej výškovke. To je OK, avšak po zrovnaní modelu sa model už tak „neprepadáva“ (jeho účinná plocha nie je zmenšovaná kosínusom uhla náklonu (cos 0 = 1)) a tak model mierne stúpne (pokým sa pilot nespamätá a výškovku nepovolí).
Preto sme zaviedli bezpečnostné opatrenie s názvom: Varovanie pritiahnutej výškovky. Nie je to hlasový „kibic“, ale naozaj zvukové varovanie prerušovaným tónom s rôznou výškou. Čím naliehavejšia situácia, tým vyšší tón. Naliehavosť je priamo úmerná miere pritiahnutia výškovky a nepriamo polohe plynovej páky. Ak je model vybavený rýchlomerom, tak sa do miery „naliehavosti“ zapracováva aj rýchlosť modelu.
Z predchádzajúceho je zrejmé, že naše modely musia byť vybavené aj prenosom stavu výškovky (prostredníctvom telemetrie) do minipočítača BenQ.
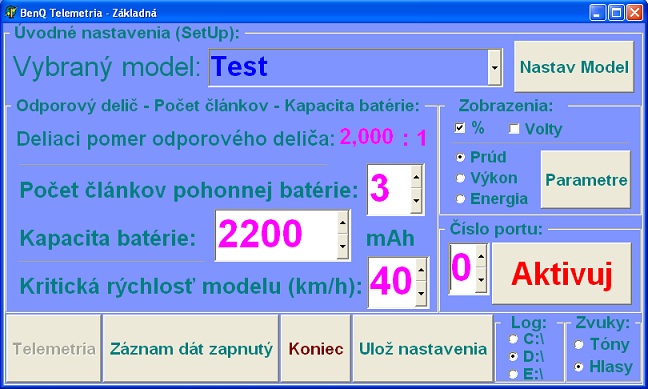
Okrem toho sme samozrejme upravili aj úvodnú obrazovku našej PC Telemetrie:
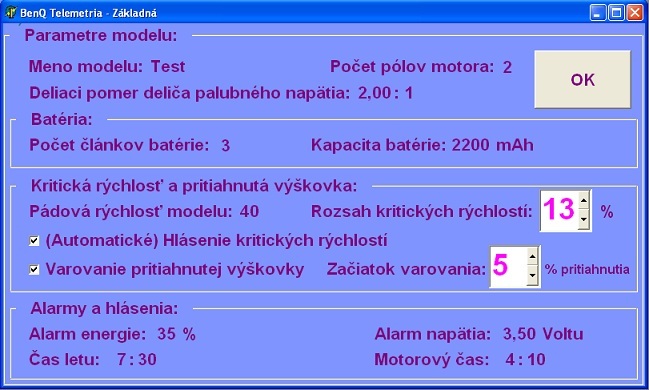
Pribudlo aj okno zobrazenia a nastavenia parametrov Letového asistenta:
Pre účely „ladenia“ programu bolo upravené aj okno samotnej telemetrie:
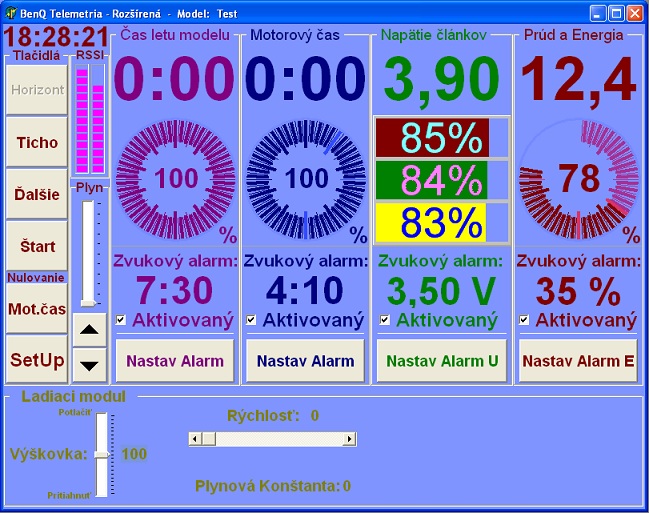
Konkrétne: dole pribudol tzv. Ladiaci modul, ktorý sa aktivuje, ak je nastavený komunikačný port číslo 0 (na úvodnej obrazovke). Vtedy program nespracováva reálne dáta z telemetrického spätného kanála, ale pracuje v režime simulovaných dát.
Vďaka tomu sme mohli činnosť kibica a varovania pritiahnutej výškovky natočiť na video pekne doma v teple:
Video: Aut. hlásenie kritických rýchlostí a varovanie pritiahnutej výškovky (až po nahratí videa som zistil, že je veľmi slabý zvuk)
Mimochodom: realizáciu (doprogramovanie) Ladiaceho modulu považujeme za jeden z nápadov roku 2018 a bude spomenutý v niektorom nasledujúcom článku.
V článku „My sme na zimu pripravení! Je aj zima pripravená na nás?“ konštatujeme aj toto:
Letové asistenčné systémy aj „drobná“ palubná automatizácia budú popísané v niektorom ďalšom článku. Momentálne sú hotové: ako po hardvérovej tak aj po softvérovej stránke, avšak nie sú odskúšané v praxi.
To je však v súčasnosti pravda len čiastočná, pretože Letový asistenčný kibic a Varovanie pritiahnutej výškovky odskúšané je!
Udialo sa to v stredu 9.1.2019, kedy sa skľudnili veterné pomery a ja som sa odhodlal ísť na testovacie lety so Skipperom na Ďatelinu.
Nabil som štyri baterky s tým, že ich asi nevylietam, ale že by som chcel aspoň počas jedného letu odskúšať Kibica aj Varovanie (pritiahnutej výškovky).
Na Ďatelinu som (vďaka rozsiahlym prípravám „novej technológie“) prišiel (sám) pomerne neskoro: o 15:35 hod. Keďže sa kvôli snehu parkovať na Ďateline nedalo, tak som auto odstavil na „trojuholníku“ a na kraj Ďateliny som postupne pozvláčal: stolík, stoličku, kufrík, „zazimovaný“ vysielač a samozrejme model. A čas plynul. Začal som sa obávať, že ak sa objavia nejaké „zádrhele“, tak napokon nič neodskúšam.
Avšak zádrhele sa nevyskytli a veci išli nečakane hladko. Kibic aj Varovanie fungovali nad očakávanie dobre a nebolo ani potrebné meniť ich nastavenia.
A tak som si let užíval a nechával sa „ukecať“ hláseniami Kibica a dal som aj na výstrahy Varovania, že výškovka modelu je bezdôvodne pritiahnutá. A let začal byť akýsi uhladenejší a ja zas kľudnejší.
Perfekt! V určitých momentoch som o oboch zapochyboval a bol som ochotný odprisahať, že model nemá až takú nízku rýchlosť a že výškovka nie je pritiahnutá. Avšak letmý pohľad na displej a sústredenie na moju ruku (držiacu knipel výškovky) ma ubezpečili, že nie oni, ale moje zlozvyky a moje zmysly ma chcú ošáliť.
Celkom hladko som pristál a založil druhú baterku. Avšak po odštartovaní som zistil, že Kibic hlási (a displej ukazuje, čo sa rýchlosti týka) nezmysly. Ihneď som pristál a zistil, že Pitotova trubica je upchatá snehom. Pri pristávaní musel model prekonávať aj nerovnosti aj stopy po lyžiaroch a do nízko-položenej Pitotky sa nabral sneh.
Pitotku som zložil a sneh vyfúkol. Postupne som vylietal všetky štyri baterky a tak som vďaka výkonnému pozičnému osvetleniu lietal až do zotmenia - do pol piatej. Potom som zase všetko vyvláčil hore k autu, naložil a išiel nad mieru spokojný domov.
Druhý deň som vyrobil upravenú „vyvýšenú“ Pitotku:


Najbližšie mám v pláne pomocou Easy Stara NET otestovať ultrazvukový výškomer, ktorý meria výšku modelu nad zemou s presnosťou na centimetre. Maximálnu merateľnú výšku som zvolil 200 cm. To stačí na to, aby moduly malej palubnej automatizácie na základe výškomera samostatne vysúvali a zaťahovali podvozok, či umožňovali / blokovali ovládanie riadenia predného kolesa a pod. Ale o tom zase niekedy inokedy.
<Staršie | tento článok | Novšie>
Napísané: 13. 1. 2019, 16:26 | Prečítané: 5452x | Kategórie: FrSky a Telemetria | Napísal: admin |
Komentáre: 5
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Velmi uzitocne! ako som kedysi lietal len na stopky, tak teraz uz su len zo zvyku, aby som videl ci sa prilis neskracuje cas lietania. :)
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
My v tom vidíme ďalší posun v snahe o zvýšenie bezpečnosti (a predĺženie života) modelov. Podobne ako sme to pred rokmi videli v telemetrii, potom v letových stabilizátoroch a napokon aj v poriadnom (dobre viditeľnom) pozičnom osvetlení modelu.
Hoci sme sa dosť často stretli s (potichu vysloveným) názorom, že tam (v modeli) máme kadejaké ".ujoviny".
Teraz už nikoho nepresviedčame ani nezdôvodňujeme, prečo to tam máme.
Skôr použijeme tento trefný výrok: odkaz
.jpg){kind=link}
Oli, nechcel by si o tom tvojom nastavení pripraviť nejaký krátky článoček?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
raz mozno hej, zatial je to take hranie sa pri lietani s malym epp modelcekom.
Ale tej radosti ked sa nieco pritom nove naucim a funguje to ako ja chcem.

Inak v podstate to mam len pobrate vedomosti z Risovych (RiMr) a inych videi a prisposobene cca tomu co chcem dosiahnut.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 .
.
Ahoj Supan.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)