Snímanie otáčok elektromotorov
Nie, nejedná sa vyložene o meranie otáčok elektromotorov, ale o ich snímanie za účelom ich ďalšieho spracovania.
Spracovaním je možné rozumieť ich hodnotové (číselné) vyjadrenie - tu sa už jedná naozaj o meranie, alebo sa zosnímané otáčky môžu prenášať na diaľku telemetriou (diaľkové meranie) alebo sa môžu spracovávať iným spôsobom, napr. za účelom ich stabilizácie v tzv. governor móde, alebo synchronizácie niekoľkých motorov vo viacmotorových modeloch.
autor: Janko O.
Je teda zrejmé, že skôr, ako budeme s hodnotou o počte otáčok motora čokoľvek robiť, je potrebné túto hodnotu nejakým spôsobom "získať".
Pod pojmom "otáčky" máme v tomto prípade na mysli frekvenciu otáčania rotora elektromotora, teda koľko otáčok vykoná za jednotku času, najčastejšie za minútu.
Snímanie otáčok jednosmerných (brushed) motorov nie je možné bez ďalších prídavných zariadení, ale snímanie otáčok striedavých (brushless) motorov je mimoriadne jednoduché. Situáciu nám uľahčuje aj skutočnosť, že práve tieto motory "ovládli modelárske nebo", hlavne vďaka svojim výkonovým parametrom a tiež životnosti, ktorými výrazne predčili jedmosmerné motory.
Pri snímaní otáčok je podstatné to, že regulátor pre striedavé motory premieňa jednosmerné napätie batérie na tri striedavé napätia so vzájomným fázovým posuvom 120 stupňov (aj trojfázové rozvody v domoch alebo v priemysle majú rovnaké fázové pomery), ktoré sú privádzané do trojice cievok motora, ktoré môžu byť zapojené do "hviezdy" alebo do "trojuholníka" (v modelárskych podmienkach väčšinou do trojuholníka).
Zmena otáčok striedavého motora sa realizuje zmenou frekvencie privádzaného trojfázového prúdu. V priemyselnej praxi majú trojfázové motory buď nemeniteľné otáčky dané frekvenciou elektrorozvodnej siete 50 Hz, alebo pri požiadavke na zmenu otáčok sa používajú tzv. frekvenčné meniče.
V modelárskej praxi samozrejme zmenu otáčok pohonného motora nutne potrebujeme a preto zmenu frekvencie trojfázového prúdu vykonáva regulátor.
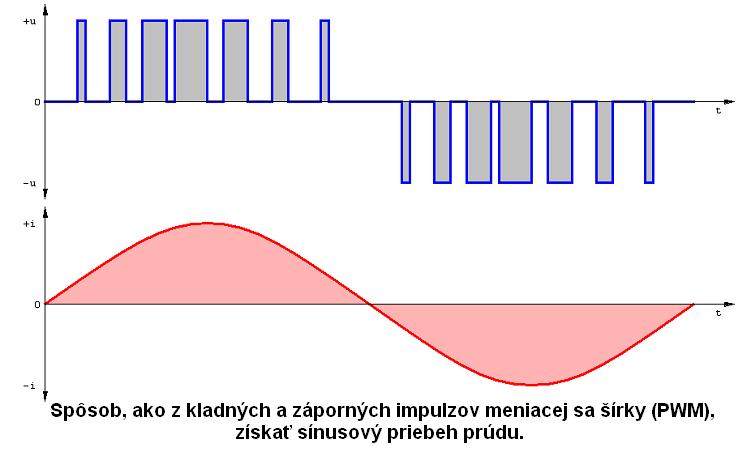
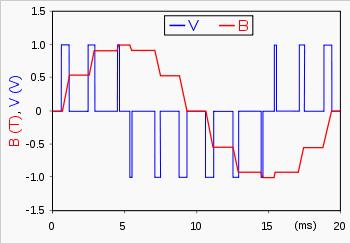
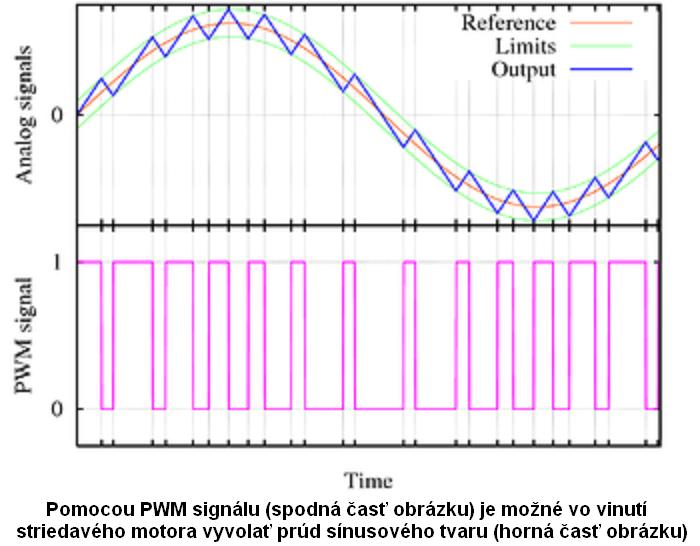
Aby (hlavne) pri nízkych otáčkach neboli cievky motora prúdovo preťažené a aby bol zachovaný "hladký" chod motora, je potrebný kvazi-sínusový (alebo kvazi-trapezoidný) priebeh prúdu cievkami vytvoriť "rozsekaním" jednosmerného prúdu pomocou PWM (Pulse Width Modulation). Prechod takéhoto zložitého priebehu prúdu cievkami motora vytvára strednú hodnotu elektrického prúdu, ktorej tvar je približne sínusový.
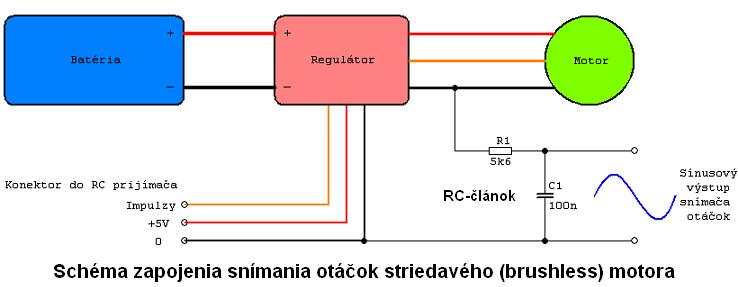
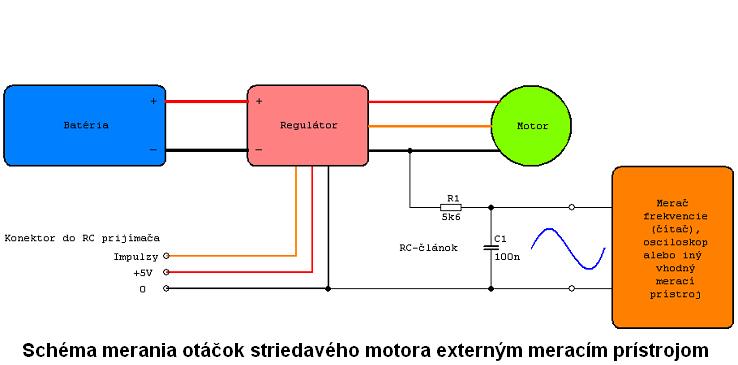
Mohli by sme zosnímať priebeh prúdu niektorej z cievok motora, ale oveľa jednoduchšie je pomocou jednoduchého RC (v tomto prípade nie Radio Control, ale Resistor - Capacitor) článku "vyrobiť" strednú hodnotu zo zložitého PWM priebehu. A ako sme už spomínali, stredná hodnota má sínusový priebeh, ktorého frekvencia je úmerná otáčkam motora.
Modelárske motory poznáme "inrunery" a "outrunery". Z pohľadu snímania, alebo presnejšie povedané, z pohľadu merania otáčok je to rozdiel podstatný. Väčšina inrunerov má v podstate len jeden magnet s dvomi pólmi (S a J), ale outrunery majú magnetov niekoľko a preto aj pólov S a J je viac.
Zhrnieme to a skrátime: merať otáčky inrunerov je oveľa jednoduchšie, pretože jedna perióda privedeného elektrického prúdu do cievky, znamená jednu otáčku motora (o 360 stupňov). Potom stačí zmerať frekvenciu tohoto prúdu a hneď máme otáčky motora za sekundu. Ale keďže sme zvyknutí vyjadrovať otáčky motorov v otáčkach za minútu, vynásobíme zmeranú frekvenciu šesťdesiatimi (1 minúta = 60 sekúnd).
Pri outruneroch je počet magnetov párny a sú dvojaké: polovica magnetov má S pól vonkajší a J pól vnútorný, druhá polovica magnetov je "opačná".
Umiestnené sú na striedačku, takže napríklad motor so 6-timi magnetmi má len tri póly S a tri póly J. Takže pre potreby merania otáčok outrunerov je nutné zmeranú frekvenciu vydeliť tou správnou konštantou (v tomto prípade 3), pretože počet magnetov v outruneroch býva rôzny (ale vždy párny).
RC-článok môžeme pripojiť na ľubovoľný vývod striedavého motora. Pre účely ďalšieho digitálneho spracovania takto získaného sínusového signálu, je niekedy potrebné ho ešte zosilniť a vytvarovať do pravouhlého priebehu. To sa dá dosiahnuť pomocou jednoduchého obvodu uvedeného na obrázku.
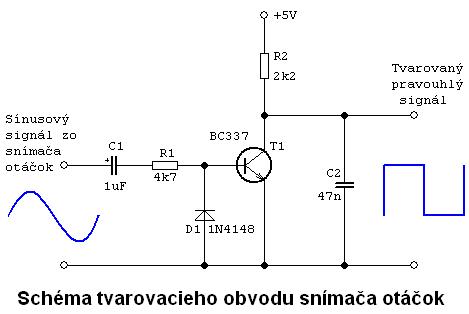
Niekedy (pri náhlych "skokoch" nameranej hodnoty otáčok) je nutné zvýšiť hodnotu kondenzátora C2 na 100nF, alebo aj viac (150nF).
Veľmi dobrý obvod (zrejme aj lepší ako ten náš) na vytvarovanie signálu z jednej fázy motoru ponúka aj náš český modelársky kolega a kamarát Jyrry: v článku Jyrry a jeho výtvory – 3. časť.
Žiaľ, tá web-stránka, na ktorú Jyrry odkazuje, už nie je dostupná. Ale nezúfajte.
Kedysi som si tú schému obkreslil (na papier) a teraz som ju nakreslil v diditálnej podobe. A vyzerá takto:
.jpg)
Takto upravený signál je ľahko spracovateľný mikrokontrolérom, ktorý zmeria jeho kmitočet (frekvenciu) a urobí potrebné matematické výpočty za účelom zobrazenia otáčok daného elektromotora.
Alebo prostredníctvom iného mikrokontroléra bude stabilizovať otáčky motora (napr. modelu vrtulníka), čím získame tzv. Governor mód, alebo pomocou iného obvodu budeme synchronizovať otáčky viacerých pohonných elektromotorov vo viacmotorovom modeli.
Súvisiace články:
Elektroinštalácia viacmotorových modelov - 1.časť
Vyvažovanie elektrických dúchadiel - 1.časť
Vyvažovanie elektrických dúchadiel - 2.časť