Rušenie spôsobené regulátorom (ESC)
Elektronike sa venujem už viac ako päťdesiať rokov, ale prekvapenia, ktoré mi v súvislosti s rušením RC prijímača (40 MHz) pripravil regulátor v modeli Easy Star, boli nečakané.
Dôvodom boli pomerne vysoké prúdy, ktoré sú v elektropohonoch úplne bežné, ale pre klasického slaboprúdového elektronika sa zdali byť priam závratné.
autor: Janko O.
Bolo to pred asi dvanástimi rokmi, keď sme sa "vinou" môjho brata Miroslava po akmer 20-tich rokoch vrátili k modelárčeniu. Ako to naozaj bolo, je popísané v článku Ako som objavil penu.
Zo "spaľovákov" sme presedlali rovno na elektrolety, konkrétne na Easy Starov, poháňaných jednosmerným motorom Permax 400, regulátory sme použili Jeti JES 020.
Prúdový odber, v závislosti od použitej batérie, bol 7 až 12 Ampérov, čiže "smiešna" hodnota v porovnaní s vyše 170 Ampérami, s ktorými sa "hrajkáme" teraz. Cez to všetko sa diali čudné veci.
Dva identické modely Easy Star, Miroslavov a môj, poháňané identickými pohonnými jednotkami, napájané idnetickými batériami, vybavené identickými RC prijímačmi, sa správali diametrálne odlišne.
Ten bratov poslušne lietal, či už v blízkosti pilota, alebo aj poriadne ďaleko, no ten môj bol počúvny len do vzdialenosti asi 20-tich metrov. Potom, ak bežal motor (ale nie na plno), sa model začal divo a neovládateľne metať a skoro vždy sa to skončilo haváriou. Ak bol motor vypnutý, tak s riadením problém nebol.
Bolo to jasné: RC prijímač bol rušený "niečím", čo súviselo s pohonnou jednotkou. Motor bol odrušený obvyklou trojicou kondenzátorov, ktorú odporúča výrobca motora.
Do podozrenia upadol regulátor. Oplášťoval som ho tenkou medenou fóliou (tienenie), ktorú som uzemnil. Nepomohlo! S Miroslavom sme si navzájom vymenili regulátory. Paradoxne, ani to nepomohlo. A tak na rad prišlo meranie.
Skrátim to a spomeniem už len záver:
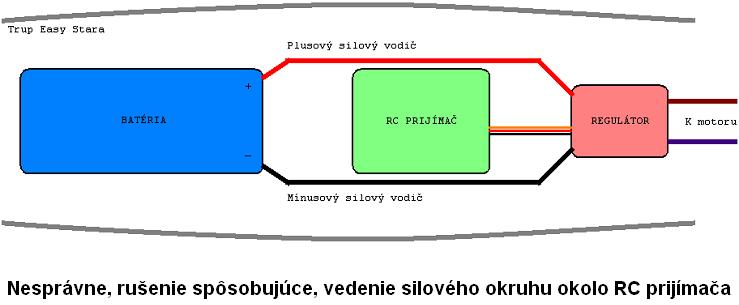
Divoké kmitanie serv bolo spôsobené silným MAGNETICKÝM rušením, ktoré sa naindukovalo do RC prijímača (Futaba). Príčina bola v nesprávnej inštalácii silových káblov medzi pohonnou batériou a regulátorom. Mínus pól batérie bol vedený okolo RC prijímača z jednej strany, plus pól okolo RC prijímača z druhej strany. Takže RC prijímač bol v strede slučky, tohoto "závitu", ktorým tiekol prúd okolo 10 Ampérov.
Keby to bol jednosmerný "hladký" prúd, to by nevadilo, ale tento prúd bol regulátorom "rozsekaný" (PWM) na impulzy rôznej šírky (a veľkej amplitúdy), ktoré podľa princípu Fourierovej transformácie produkujú takmer nekonečné množstvo vyšších harmonických kmitočtov. Podstatné je to, že niektoré z týchto kmitočtov spôsobili rušenie buď vstupného signálu v pásme 40 MHz, alebo možno medzifrekvenčného signálu 455 kHz.
Toto rušenie magnetickým poľom som identifikoval pomocou osciloskopu, priblížením meracej cievky (pripojenej na vstup osciloskopu) do blízkosti RC prijímača. Pri bežiacom motore sa na tomto jedinom závite meracej cievky naindukovalo rušivé vysokofrekvenčné napätie niekoľko desiatok milivoltov, čo pri citlivosti RC prijímača (rádovo jednotky mikrovoltov) je hodnota obrovská.
Nechcelo sa mi prerábať starostlivo vedenú inštaláciu silového rozvodu (bol to môj prvý elektrolet), tak som RC prijímač rovnako starostlivo zabalil do Alobalu a "ofačoval" priehľadnou izolepou. Vznikla tak tzv. Faradayova klietka a situácia sa rapídne zlepšila. To som už však bol "nakazený" paranojou a tak som chcel odrušenie doviesť až k dokonalosti a možno až k "ad absurdum".
Za zdroj rušenia som považoval čokoľvek. Do Alobalovo-izolepového kabáta som postupne obliekol všetky batérie (čo pochopiteľne zhoršovalo chladenie) a dokonca aj silové vodiče medzi batériou a regulátorom. Každé toto opatrenie prispelo svojou "troškou do mlyna" a rušenie bolo stále menšie a menšie, ale z modelu sa stávalo lesklé Alobalové monštrum.
A tak som utrel slzu  , vytrhal starostlivo "zakopanú" silovú kabeláž vedenú po obidvoch stranách trupu a celú ju som zrealizoval znovu a inak.
, vytrhal starostlivo "zakopanú" silovú kabeláž vedenú po obidvoch stranách trupu a celú ju som zrealizoval znovu a inak.
Obidva silové vodiče teraz viedli už len popri jednej strane trupu (tak, ako to mal môj brat Miroslav, ktorý - možno ani netušiac - sa takto týmto problémom vyhol), čo najďalej od RC prijímača, boli tesne pri sebe a hlavne boli skrútené. Táto starodávna "finta", ktorú dnes tak úspešne využívajú počítačové siete Ethernet, sa volá Twisted Pair, čiže skrútená dvojlinka.
Okrem toho som skúšal znížiť rušenie použitím toroidov. Musím povedať, že táto metóda sa ukázala ako absolútne neúčinná nielen praktickým overením, ale ani na meracích prístrojoch nebolo možné zistiť žiadne zlepšenie.
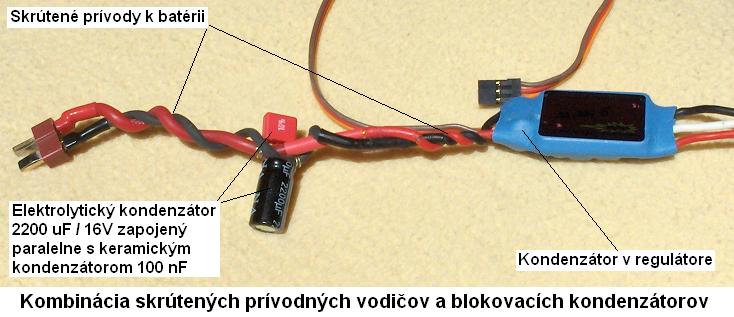
Úplne iná situácia nastala, keď som paralelne k batériovým prívodom regulátora (teda medzi plus a mínus, čo najbližšie k regulátoru) zapojil elektrolytický kondenzátor s vysokou kapacitou (2200 uF/16V). Bližšie je o tomto probléme pojednané v článku Vplyv odberu serv na rušenie.
Rušenie v okamihu prestalo, pretože pulzujúci prúd, spôsobujúci rušenie, tiekol len kratulinkými vodičmi medzi týmto kondenzátorom a regulátorom. Dlhými vodičmi medzi batériou a takto upraveným regulátorom tiekol len "hladký" jednosmerný prúd. A ten rušenie nespôsobuje.
A tak táto kombinácia dvoch opatrení (kondenzátor pri regulátore a skrútené vodiče) priniesli ono túžobne očakávané "ovocie" v podobe bezporuchového riadenia modelu.
Neskôr, keď som začal používať striedavé (brushless) motory a tomu zodpovedajúce regulátory, všimol som si, že v nich už spomínaný kondenzátor pripojený je. Jeho prvotnou a hlavnou úlohou je tzv. rekuperácia energie z cievok elektromotora. Odrušenie je len akousi pridanou hodnotou. Ale mohli by sme to smelo nazvať: Two in One - dva v jednom.
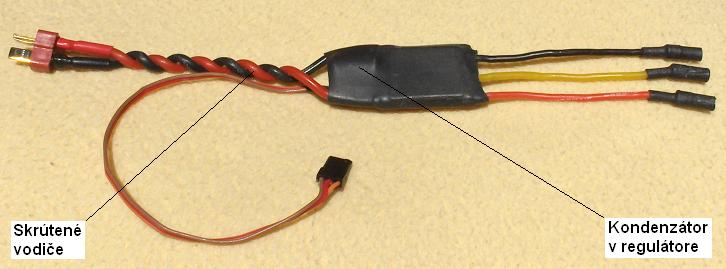
Keď som pred časom na HobbyCity kúpil dva 30 Ampérové regulátory pre jednosmerné (brushed) motory značky Turnigy (určené do dvojmotorového modelu Twin Star, poháňaného opäť dvomi Permax 400-kami), všimol som si, že regulátory sú už od výroby osadené spomínaným blokovacím elektrolytickým kondenzátorom. Firma Jeti do svojich jednosmerných regulátorov tieto kondenzátory dodnes nemontuje.

Je otázne, či by toto, na začiatku tohoto článku spomínané rušenie, spôsobené magnetickým poľom okolo silových vodičov, mohlo zapríčiniť nespoľahlivé riadenie modelov, ovládaných RC súpravami na 2,4 GHz. Ačkoľvek tieto zariadenia využívajú voči poruchám výrazne odolnejšie komunikačné metódy ako súpravy pre pásma 35 a 40 MHz, je možné, že pri zhode viacerých nepriaznivých okolností by mohlo dôjsť k problémom aj tu.
A tak netreba "dráždiť kobru bosou nohou", ale treba používať skrútené silové vodiče, ktoré budú vedené čo najďalej od RC prijímača a jeho antén(y) a ak je to len trochu možné, je vhodné "twistovať" aj vodiče vedúce z regulátora do motora.

Súvisiace články:
Vplyv dlhých prívodných káblov na činnosť serv.