Výhody digitálnych serv voči servám analógovým – 1.časť
Tento článok je akýmsi plynulým prechodom medzi 3. časťou minisérie venovanej stabilite kľudovej polohy serv v závislosti od teploty a novou minisériou, ktorá sa bude zaoberať porovnaním vlastností digitálnych serv a serv analógových.
Takže je celkom pochopiteľné, že budeme porovnávať teplotnú stabilitu serv, s tým, že v závere bude poukázané, kde je „zakopaný pes“ a prečo sú digitálne servá o toľko lepšie ako servá analógové.
____________
autor: Janko O.









Takže najskôr urobme malú rekapituláciu a zopakujme výsledky, ktoré jednotlivé servá dosiahli. V 1. časti to boli tieto servá:

V 2. časti zase tieto:

A v 3. časti tieto:

Pripomeňme, že v 1. tabuľke sú len samé analógové servá a mali byť aj v 2. tabuľke, ale do tej sa nám „omylom“ dostalo aj jedno digitálne servo, a to konkrétne HD-2216HB a samozrejme hneď zaujalo svojou teplotnou stabilitou v teplotnom rozsahu, neprekračujúcom +50 st. Celzia. V 3. tabuľke je rozdelenie serv jasne rozlíšené.
Aby sme pochopili, prečo sú vlastnosti serv práve také, musíme pochopiť ich funkciu. Servo (či už klasické - analógové alebo digitálne) sa skladá zo štyroch základných častí:
- elektromotora,
- prevodovky,
- snímača polohy (potenciometra (alebo magnetického enkodéra)) a
- elektroniky.
Začneme chronologicky, teda servom analógovým. Jeho bloková schéma je tu:
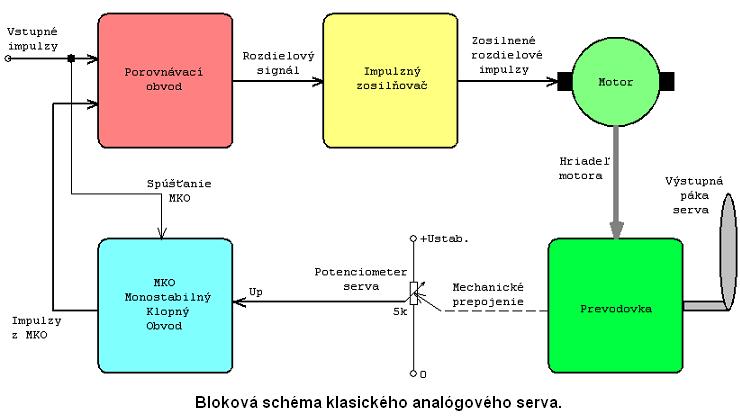
Elektronika je "mozgom" serva pretože vstupné impulzy, prichádzajúce do serva z prijímača porovnáva s impulzami, ktoré si sama "vyrába" v MKO (Monostabilný Klopný Obvod). Šírka impulzov, ktoré generuje MKO, je závislá od časovej konštanty RC-člena a napätia na bežci potenciometra Up. To je závislé od polohy potenciometra, čiže od natočenia výstupného hriadeľa serva. Porovnávací obvod porovnáva vstupné impulzy s impulzami z MKO (urobí ich rozdiel), rozdielový signál pokračuje do impulzného zosilňovača a zosilnený rozdielový signál napája elektromotor.
Ak sa šírka vstupných impulzov zhoduje so šírkou impulzov z MKO, rozdielový signál je nulový a motor stojí. Ak sú vstupné impulzy širšie ako impulzy z MKO, rozdielový signál je kladný a motor sa krúti na jednu stranu. Ak sú vstupné impulzy užšie ako impulzy z MKO, tak je rozdielový signál záporný a motor sa krúti opačne.
Čím väčší je rozdiel medzi šírkou vstupných impulzov a impulzov z MKO, tým rýchlejšie sa bude motor krútiť. Celé obvodové zapojenie serva je vlastne elektro-mechanická záporná spätná väzba, ktorá núti servo, aby sa natočilo do takej polohy, kde bude šírka impulzov z MKO rovnaká ako šírka vstupných impulzov, čím bude rozdielový signál nulový a servo nebude musieť nič robiť. Oj, aká podobnosť s ľudskou povahou!?
Hlavná teplotná nestabilita analógového serva je „zakliata“ v MKO, konkrétne v teplotnej závislosti časovej konštanty RC-člena. A ako už sám názov hovorí, RC-člen (alebo RC-článok) sa skladá z dvoch súčiastok: z rezistora R a z kondenzátora C. A ak by sme mali prstom ukázať na vinníka, tak by to bol najčastejšie tzv. časovací kondenzátor C. Mnohé druhy kondenzátorov menia s teplotou svoju kapacitu, čím sa mení časová RC-konštanta, tým sa mení šírka impulzu MKO a tým sa mení poloha serva. Basta.
Naproti tomu digitálne servo, ačkoľvek sa skladá z rovnakých štyroch základných častí ako servo analógové, tak jeho elektronika je trochu iná:
.jpg)
Niektoré jej bloky sú totožné s blokmi elektroniky analógového serva, ale ústrednú úlohu tu zohráva mikrokontrolér. Úplne chýba MKO, pretože jeho funkciu prebral mikrokontrolér, konkrétne jeho integrovaná súčasť: ADC (Analog to Digital Converter - Analógovo Číslicový Prevodník). Ten napätie z potenciometra premení na digitálnu hodnotu – na číslo. Toto číslo je porovnávané s iným číslom, s digitálnou hodnotou, ktorú mikrokontrolér získal tak, že zmeral šírku vstupného impulzu (signálu z RC prijímača). Na blokovej schéme sme to vyjadrili tak, že mikrokontrolér previedol šírku impulzu na číslo.
 A keďže pre mikrokontrolér je práca s číslami jeho „najobľúbenejšou zábavkou“, tak ten potom na základe programu, ktorý riadi jeho činnosť, na svojom výstupe generuje riadiace impulzy pre motor. Tie sú zosilnené v impulznom zosilňovači a privedené do motora. Dá sa povedať, že ďalšia činnosť digitálneho serva je obdobná, ako činnosť serva analógového. Mikrokontrolér sa snaží udržiavať stav, keď sa číslo z ADC rovná číslu šírky impulzu, vtedy nemusí generovať riadiace impulzy pre motor, takže nemusí robiť (zdanlivo) nič.
A keďže pre mikrokontrolér je práca s číslami jeho „najobľúbenejšou zábavkou“, tak ten potom na základe programu, ktorý riadi jeho činnosť, na svojom výstupe generuje riadiace impulzy pre motor. Tie sú zosilnené v impulznom zosilňovači a privedené do motora. Dá sa povedať, že ďalšia činnosť digitálneho serva je obdobná, ako činnosť serva analógového. Mikrokontrolér sa snaží udržiavať stav, keď sa číslo z ADC rovná číslu šírky impulzu, vtedy nemusí generovať riadiace impulzy pre motor, takže nemusí robiť (zdanlivo) nič.
V čom teda tkvie lepšia teplotná stabilita digitálnych serv? V tom, že nemajú žiadny časovací RC-člen, ktorý by sa skladal z kondenzátora, ktorého kapacita by bola závislá od teploty. Teplotná nestabilita digitálneho serva môže vzniknúť, a merania to potvrdili, keď vplyvom príliš vysokej alebo nízkej teploty prestane byť napätie na potenciometri stabilizované, alebo začne nespoľahlivá funkcia ADC, či mikrokontroléra ako celku.
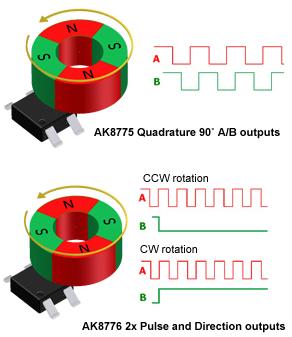
V poslednom období sa do digitálnych serv začína „tlačiť“ nová súčiastka, ktorá má nahradiť ich asi najporuchovejšiu časť – potenciometer (slúžiaci ako snímač polohy). Táto súčiastka má názov magnetický enkodér. Bloková schéma serva s magnetickým enkodérom je tu:
.jpg)
 Pre pochopenie funkcie je podstatné si uvedomiť, že táto súčistka, ktorej hlavnou súčasťou je magnet a špeciálny integrovaný obvod, na svojom výstupe dáva digitálnu hodnotu – číslo, ktoré je úmerné natočeniu (teda polohe) magnetu voči integrovanému obvodu. Ďalšie spracovanie „čísiel“ je rovnaké, pretože mikrokontroléru je ľahostajné, či „pracovné podklady“ dostáva z ADC alebo z magnetického enkodéra. Akurát, že magnetický enkodér sa nemôže vybehať (opotrebovať odporovú dráhu), ako potenciometer.
Pre pochopenie funkcie je podstatné si uvedomiť, že táto súčistka, ktorej hlavnou súčasťou je magnet a špeciálny integrovaný obvod, na svojom výstupe dáva digitálnu hodnotu – číslo, ktoré je úmerné natočeniu (teda polohe) magnetu voči integrovanému obvodu. Ďalšie spracovanie „čísiel“ je rovnaké, pretože mikrokontroléru je ľahostajné, či „pracovné podklady“ dostáva z ADC alebo z magnetického enkodéra. Akurát, že magnetický enkodér sa nemôže vybehať (opotrebovať odporovú dráhu), ako potenciometer.
Súvisiace články:
Stabilita kľudovej polohy serva v závislosti od teploty – 3.čas
Stabilita kľudovej polohy serva v závislosti od teploty – 2.časť
Stabilita kľudovej polohy serva v závislosti od teploty
Oprava serva - 1.časť - vybehané servo
Oprava serva - 2.časť - zhorená elektronika
180 - stupňové servo: Ako funguje a na čo je?
Digital servo advantages over analog block diagram thermal stability vantaggi servo digitale su schema a blocchi analogici di stabilità termica Digital servo fördelar jämfört med analog blockschema av termisk stabilitet Servo digital ventajas sobre diagrama de bloque análogo de la estabilidad térmica Цифровые серво преимуществ по сравнению с аналоговыми блок-схема термической стабильностью vantagens servo digital sobre diagrama de blocos analógicos de estabilidade térmica korzyści Digital servo poprzez analogową schemat blokowy stabilności termicznej Digital servo fordeler framfor analoge blokkdiagram av termisk stabilitet Digitale Servo Vorteile gegenüber analogen Blockdiagramm der thermischen Stabilität Digitális szervo előnye analóg blokkvázlata termikus stabilitás Digitale servo voordelen ten opzichte van analoge blokschema van de thermische stabiliteit avantages servo numérique sur schéma analogue de la stabilité thermique Digitaalinen servo etuja analogiseen lohkokaavio lämpöstabiliteetin Digital servo fordele i forhold til analoge blokdiagram af termisk stabilitet مزايا أجهزة رقمية على الرسم البياني كتلة التناظرية الاستقرار الحراري Digital יתרונות סרוו על דיאגרמת בלוק אנלוגי של יציבות תרמית