Vôla serv - a čo s ňou?
Medzi modelármi, ale aj na modelárskych fórach často vznikajú diskusie o rôznych servách, o ich rýchlosti, o ich presnosti, ale v neposlednom rade aj o ich vôlach a ich vplyve na ich elektrický odber a v konečnom dôsledku na samotný let modelu.
autor: Janko O.
Celkovo sa dá povedať, že servá Hitec majú pomerne dobrú elektroniku. Nemáme k dispozícii servá všetkých bežných značiek, ale možno ani niektoré servá Futaba nemajú takú dobrú elektroniku ako Hitec.
Čo rozumieme pod pojmom dobrá elektronika?
Na prvom mieste asi presnosť, čiže pásmo necitlivosti. U serv Hitec je toto pásmo rádovo jednotky mikrosekúnd šírky vstupného impulzu. U ostatných, obzvlášť lacných čínskych serv, je to na rozhraní k desiatim mikrosekundám a aj viac. Táto problematika je podrobne popísaná a meraniami podložená v článku "Presnosť, citlivosť, alebo pásmo necitlivosti modelárskych serv".
Navyše sa môže pridať aj nesymetria, teda presnosť kroku jedným smerom je iná ako presnosť opačným smerom.
U iných serv zase môže dochádzať k prekmitávaniu pri rýchlom pohybe z jednej polohy do druhej. Ale u niektorých opäť nesymetricky - len na jednej strane. Na opačnej strane servo neprekmitne. Pri bežnom riadení modelu to nemusí vadiť, ale ...
Úplne iným problémom je presnosť mechanická, čiže vôla polohy výstupnej páky pri vypnutom serve. Je nutné zdôrazniť, že pri vypnutom serve. Ak servo s veľkou mechanickou vôlou dostáva riadiace impulzy, výsledný efekt bude úplne iný (vôla bude výrazne menšia).
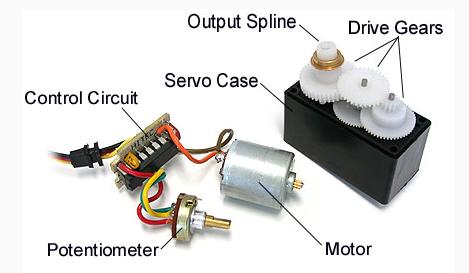
Všeobecne, servá s plastovými prevodmi bývajú na tom s mechanickou vôlou lepšie ako servá s kovovými prevodmi. Plastové ozubené kolieska sú na seba viac "natlačené" (čiže s menšou vôlou), pretože pružnosť a "mastnota" polyamidu im to dovolí, bez následkov na zvýšené trenie a následný mechanický odpor pri otáčaní.
Kovové prevody tieto vlastnosti nemajú a preto nové servá "metal gear" majú síce malú mechanickú vôlu, ale idú ťažko. Ale po nejakom čase "si sadnú", takže idú ľahšie, ale výrazne sa zväčší mechanická vôla.
Ale netreba zúfať, pretože v zapnutom stave sa táto vôla zmenší skoro na úroveň pásma necitlivosti. Ale za cenu zvýšenej spotreby. Elektronika sa snaží neustále doťahovať výstupnú páku do tej správnej polohy. Výsledkom je zdanlivo nelogické vrčanie nehybného serva a už spomínaná zvýšená spotreba. A ak je takých serv viac, ...
Zníženie mechanickej vôle pri zapnutom serve vyplýva z princípu jeho
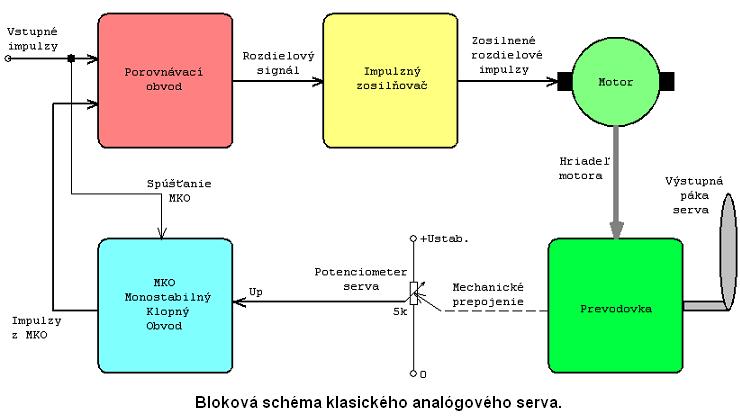
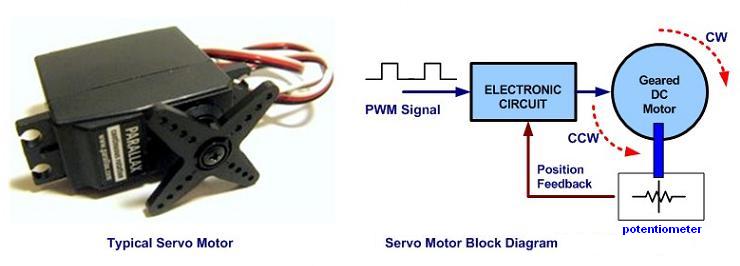
Elektronika je "mozgom" serva, pretože vstupné impulzy, prichádzajúce do serva z prijímača porovnáva s impulzami, ktoré si sama "vyrába" v MKO (Monostabilný Klopný Obvod). Šírka impulzov, ktoré generuje MKO, je závislá od napätia na bežci potenciometra Up. To je závislé od polohy potenciometra, čiže od natočenia výstupného hriadeľa serva. Porovnávací obvod porovnáva vstupné impulzy s impulzami z MKO (urobí ich rozdiel), rozdielový signál pokračuje do impulzného zosilňovača a zosilnený rozdielový signál napája elektromotor.
Ak sa šírka vstupných impulzov zhoduje so šírkou impulzov z MKO, rozdielový signál je nulový a motor stojí. Ak sú vstupné impulzy širšie ako impulzy z MKO, rozdielový signál je kladný a motor sa krúti na jednu stranu. Ak sú vstupné impulzy užšie ako impulzy z MKO, tak je rozdielový signál záporný a motor sa krúti opačne.
Čím väčší je rozdiel medzi šírkou vstupných impulzov a impulzov z MKO, tým rýchlejšie sa bude motor krútiť. Celé obvodové zapojenie serva je vlastne elektro-mechanická záporná spätná väzba, ktorá núti servo, aby sa natočilo do takej polohy, kde bude šírka impulzov z MKO rovnaká ako šírka vstupných impulzov, čím bude rozdielový signál nulový a servo nebude musieť nič robiť.
Je teda zrejmé, že akékoľvek vonkajšie sily sa pokúsia pohnúť výstupnou pákou serva, ktoré vykazuje mechanické vôle. Tým však pohnú aj bežcom potenciometra a tým sa zmení aj jeho napätie Up, čím sa ale rozbehne vyššie popisovaný dej, ktorého výsledkom bude, že sa bežec potenciometra a tým aj výstupná páka serva, opäť snaží vrátiť do pôvodnej polohy. Avšak za cenu spotreby el. energie. Čím väčšie mechanické vôle, tým väčšia spotreba serva, od ktorého v danej chvíli paradoxne požadujeme, aby nerobilo nič, čiže aby sa nehýbalo.
S tým čiastočne súvisí aj mylná predstava, že servo počas letu modelu "žerie" len keď sa pohybuje. Ale na ovládacie plochy modelu (aj na nepoužívané pristávacie alebo brzdiace klapky) počas letu pôsobia aerodynamické sily. Tie sa ich snažia vychýliť na tú alebo onú stranu, podľa režimu letu. A servá sa zase snažia udržať ovládacie plochy v tej polohe, akú im určuje šírka impulzu. Výsledok: servá sa síce takmer ani nehnú, ale usilovne papkajú. A 6 takých serv na jednom 2A BECi urobí svoje. Viem o čom hovoríme (teda píšeme), veď už takto (aj nám) padol nejeden model.
Súvisiace články:
Presnosť, citlivosť, alebo pásmo necitlivosti modelárskych serv
Výhody digitálnych serv voči servám analógovým – 1.časť
Stabilita kľudovej polohy serva v závislosti od teploty – 3.časť
Stabilita kľudovej polohy serva v závislosti od teploty – 2.časť
Stabilita kľudovej polohy serva v závislosti od teploty
Vplyv dlhých prívodných káblov od zdroja na napájanie prijímača
Vplyv dlhých prívodných káblov na činnosť serv.
Oprava serva - 2.časť - spálené servo
Oprava serva - 1.časť - vybehané servo
180 - stupňové servo: Ako funguje a na čo je?
Aké silné servá dať do modelu?
(Slovenský) Program na výpočet sily serva do modelu