(„Cevaro“) Pozičné osvetlenie modelu: iný spôsob zapínania
Do sekcie Download sme pridali aj HEX-súbory na naprogramovanie mikrokontrolérov PIC12F683.
Ku dnešnému dňu boli stiahnuté dokopy vyše 1250-krát (čo však samozrejme vôbec neznamená, že všetci, čo si to stiahli, to aj realizovali).
Potom sme však dostali mail od nášho českého modelárskeho kolegu Standu (ktorý používa prezývku Steewe), či by sa blikač nedal zapínať a vypínať inak.
autor: Janko O.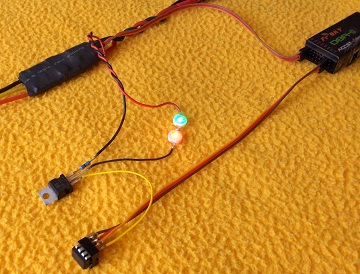 Pred zhruba piatimi rokmi sme zverejnili veľmi jednoduchý a hádam aj veľmi názorný návod na výrobu nášho „cevaro“ pozičného osvetlenia modelu.
Pred zhruba piatimi rokmi sme zverejnili veľmi jednoduchý a hádam aj veľmi názorný návod na výrobu nášho „cevaro“ pozičného osvetlenia modelu.









Článok: („Cevaro“) Pozičné osvetlenie modelu: podrobne, aj s návodom
Článok: Pozičné osvetlenie modelu: podrobne, aj s návodom – 2. časť
Pôvodne nás ku spôsobu ovládania (teda zapínania a vypínania) nášho („cevaro“) pozičného osvetlenia (zjednodušene Blikača) viedla potreba šetriť ovládacie kanály našich RC súprav: pri niektorých modeloch sa 8 kanálov „minie“ jedna-dve.
A tak sme sa (vtedy) rozhodli ovládať naše pozičné osvetlenie pomocou tzv. „fantómového“ kanálu: tak je možné jedným kanálom ovládať dve (a niekedy aj tri) nezávislé zariadenia. V našom prípade sme takto „nafantómovali“ zapínanie/vypínanie osvetlenia na kanál ovládania Letového stabilizátora Ed_11. Názorne to ukazujú tri kratučké videá na konci článku „(„Cevaro“) Pozičné osvetlenie modelu: podrobne, aj s návodom“.
Keďže Letový stabilizátor Ed_11 sa ovláda kanálovými impulzmi, ktorých šírku môže pilot (počas letu modelu) meniť v rozsahu od 1050 do 1950 mikrosekúnd, my sme sa rozhodli ovládanie nášho pozičného osvetlenia urobiť tak, že ak sú kanálové impulzy dlhšie ako 1950us, tak hoci na činnosť Letového stabilizátora to už nemá žiadny vplyv, mikrokontrolér (PIC12F683) to vyhodnotí a osvetlenie zapne (ak bolo vypnuté) alebo vypne (ak bolo zapnuté). Viď spomínané videá.
Je zrejmé, že by sa tu dal „nafantómovať“ ešte ďalší dvojstavový (Zap/Vyp) kanál: ak by boli kanálové impulzy kratšie ako 1050us. Vtedy by sa dala použiť obľúbená reklamná skratka: 3 in 1  .
.
Samozrejme, tým nosným kanálom nemôže byť výškovka, smerovka, krídielká, ba ani plyn, ale len taký kanál, ktorý bez ujmy „prežije“ krátkodobú extrémnu hodnotu svojho impulzu. Ovládanie Letového stabilizátora je na to ideálne.
Steewe však chce svoje pozičné osvetlenie ovládať klasicky – prepínačom: v jednej polohe sa osvetlenie postupne zapne a zostane zapnuté, pokým prepínač neprepne do druhej polohy. Vtedy sa pozičné osvetlenie postupne vypne a zostane vypnuté.
A tak sme teda softvér pre mikrokontrolér teraz upravili tak, aby fungoval práve takto, pričom sme hraničnú hodnotu nastavili na 1600 mikrosekúnd: ak sú kanálové impulzy širšie ako 1600us, tak sa pozičné osvetlenie postupne aktivuje, ak sú užšie, tak sa v opačnom poradí postupne deaktivuje. Postup aktivácie a deaktivácie je opäť zrejmý z už spomínaných videí (všímajte si "svetielka" na modeli v pozadí):
Video "Cevaro" osvetlenie v praxi: zapnutie a vypnutie
Keďže sa zmenil len softvér, tak obvodové zapojenie zostáva rovnaké ako je uvádzané v článkoch „(„Cevaro“) Pozičné osvetlenie modelu: podrobne, aj s návodom“ a „Pozičné osvetlenie modelu: podrobne, aj s návodom – 2. časť“.
Opäť sme pripravili dve verzie softvéru:
-
jedna je so vstupom ovládacieho signálu na vývode mikrokontroléra číslo 6 a je možné stiahnuť si ju v sekcii Download alebo priamo TU
-
druhá je so vstupom ovládacieho signálu na vývode mikrokontroléra číslo 4 a je možné stiahnuť si ju v sekcii Download alebo priamo TU
V prípade, že do vstupu nie je privádzaný signál, osvetlenie sa postupne zapne samo po zapnutí napájania – pripojení batérie v modeli.
<Staršie | tento článok | Novšie>
Napísané: 23. 6. 2021, 08:19 | Prečítané: 9144x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 11
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
............
Aj sme nad tým s Miroslavom premýšľali, ale akosi sa nám z hľadiska jednoduchosti, jednoznačnosti činnosti, či spoľahlivosti osvedčili práve takéto nie univerzálne, ale "na mieru šité" riešenia.
Ide o to, že väčšinou si to tam modelár napáli raz navždy. A basta.
My takto šetríme robotu a starosti ostatným a pridávame ich sebe, ale nevadí. Vyhneme sa tým rôznym vysvetlovaniam a návodom v štýle: zapni batériu, spláchni na záchode, otvor okno, vypni batériu, zatvor okno a teraz už to bude fungovať nie v móde 1, ale v móde 2
 .
.
Ešte pred pár rokmi sme sa snažili urobiť univerzálne riešenie s našim AssOrxom (zlúčenie verzie softvéru pre Normal a Reverz do jednej) a napokon sme sa vrátili ku dvom samostatným súborom. Bolo to (pre používateľa) menej problémové.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Alebo potom mailom: rcmodely (z) cevaro.sk
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
byl byste ochotni mi naznačit, jakým způsobem v PICu probíhá (a v programu je provedeno) zachytávání vstupního impulsu (čili (měření jeho šířky)?
PICy programuju, ale s tímto se už nějakou chvíli tak trochu peru a RC spínač pro mě bohužel zatím zůstává "zakletou" konstrukcí…
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Samozrejme, ale nie som si istý, či vám to pomôže. Ide o to v čom sa to programuje.
My používame PIC Basic Pro Compiler, ktorý je veľmi intuitívny, ale hlavne má príkazy "šité na mieru" pre elektrotechnikov.
A práve jeden z nich používame na meranie šírky impulzov: príkaz PULSIN. Má tri parametre: pin, na ktorom budú impulzy prítomné; či je impulz normál (logická jednotka), alebo je inverzný (logická nula) a meno premennej, do ktorej bude uložená nameraná hodnota.
Vieme, že používateľov PIC Basic Compileru nie je veľa, preto si nie sme istí, či vám naše vysvetlenie pomôže.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Děkuji za odpověď, o případné užitečné informace se samozřejmě podělím.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 ( radostný úsmev v dobrom slova zmysle)
( radostný úsmev v dobrom slova zmysle)
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Nic ve zlém, ale co je k tu smíchu? Nebo snad o informace nestojíte?
Je vám znám fakt, že každé takové prostředí překládá nejdříve do ASM a až z něj kompiluje dále, a že v ASM bude vidět dobře, jak to chlapci z Melabs vymysleli?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Možno som zvolil zlý emotikon (a možno mi nie je úplne jasný ich skutočný význam), ale mal som na mysli nie smiech (či dokonca výsmech), ale úsmev. Keď (pri osobnej konverzácii) poďakujem alebo s niečím súhlasím alebo súhlasne kývnem hlavou, mám vo zvyku sa pri tom usmiať, na znak spokojnosti.
Mohol by som ten emotikon teraz zmazať a bol by kľud, ale prípadní ďalší čitatelia by nevedeli, čo tam pôvodne bolo.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Jak jim to pořádně rozpitvám, podělím se o info.
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)