Letové stabilizátory – ako to vidím ja: 1.časť
Ak ste jeho komentáre čítali, tak už to viete, ak ste nečítali, tak po prečítaní tohto jeho článku (ale aj ďalších, už pripravených) zistíte, že Ľubo sa v technike vyzná.
Je technik v tom zmysle, že sa vyzná v elektronike, vyzná sa v programovaní, trochu aj v mechanike a aerodynamike a hlavne: má to tzv. technické cítenie.
A to sa v (súčasnom - pretechnizovanom) modelárstve zíde.
úvod pripravil: Janko O.
autor článku: Lubond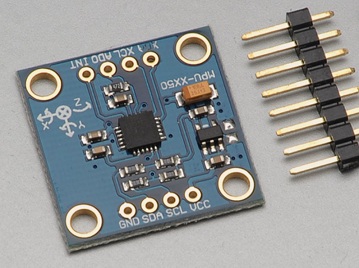 Dnes si pripomenieme prvú časť miniseriálu „z pera“ nášho modelárskeho kolegu a kamaráta, ktorý na modelárskych fórach vystupuje pod prezývkou Lubond.
Dnes si pripomenieme prvú časť miniseriálu „z pera“ nášho modelárskeho kolegu a kamaráta, ktorý na modelárskych fórach vystupuje pod prezývkou Lubond.









Letové stabilizátory – ako to vidím ja
* Úvahy o tom prečo a aký stabilizátor
* Príklad spojenie RX3S stabilizátora s SBUS prijímačom – ako cesta k ďalším kanálom
* HW úprava – doplnenie SBUS invertora na dosku stabilizátora
Na úvod musím prehlásiť, že prezentujem výhradne svoje názory (ak v texte nie je uvedené inak) a že týmto článkom nikoho k ničomu nenabádam, nezakazujem, neprikazujem. Nie som žiadny modelársky macher, aj preto nikoho nechcem poúčať či kritizovať. Mojim jediným cieľom je podeliť sa o svoje skúsenosti v oblasti použitia letového stabilizátora. Keďže som povolaním technik a nie spisovateľ, za literárne a iné humanitné nedokonalosti sa vopred ospravedlňujem.
Rozhodnutie napísať príspevok podporil článok ”Ed_20 Flight Stabilizer: aj s ovládaním podvozkovej nohy”. Znovu téma OpenFlightStab, na tomto webe známa pesnička, ale tento krát s novým refrénom. Zakomponovať tam riadenie prednej podvozkovej nohy – ďalšia super vec, chlapci! Realistické RC modely sú dosť (aj) o technických pikoškách, to sa mi na nich páči. Článok vo mne prebudili odhodlanie vyriešiť aj problém, ktorý vo mne hlodal dlho. Problém, ako pre model získať viac kanálov a nemusieť sa zrieknuť stabilizátora. Použiť 2 prijímače a jeden z nich “vyhradiť” stabilizátoru sa mi nezdalo dosť elegantné. Prechod na čistú SBUS štruktúru “á la Futaba” zase príliš drahé. Tak žeby niečo “medzi tým”  ?
?
Príprava článku s mojím riešení ma však inšpirovala ku zamysleniu sa, prečo vlastne stabilizátory pri lietaní stále používam. Tiež som pospomínal na svoje nedávne začiatky a to utvrdilo rozhodnutie napísať. Dovoľte mi preto začať z opačného konca ... teda od začiatku.
Ak sa vám môj príspevok bude zdať, že “to všetko tu už bolo”, tak vedzte – máte úplnú pravdu! Takmer všetko tu už bolo, len (my) sme pri tom neboli . To slovko my sa mi zdá dôležité. Preto všetko píšem zo svojho, vyslovene subjektívneho pohľadu.
Trošku aj dúfam, že povzbudím i ostatných pochváliť sa svojimi zážitkami. Portál Realistické RC modely, ako píše MiOr a Janko O. v záhlaví hlavnej stránky, je o nás a pre nás rovnako “postihnutých”. Tak využívam ich ponuku a prezentujem svoj pohľad.
Prvá moja “rečnícka otázka” je alfou a omegou všetkých ďalších:
1/ Čo vlastne je “letový stabilizátor”?
Ak máte o stabilizátoroch už čo-to načítané, kľudne môžete tento odstavec preskočiť.
Aj názov napovedá, že stabilizátor je zariadenie napomáhajúce stabilizovať let modelu vo všetkých troch letových osiach. Stabilizácia letu je teda viac či menej o udržiavaní lietadla v požadovanej polohe. Toto je všeobecne známe. Ale že počet a typ senzorov zásadne ovplyvňuje vlastnosti stabilizátora až tak známe nie je (9 modelárov z 10-tich mi o tom nevedelo nič povedať). Preto na úvod stručne napíšem, prečo a aké senzory sa v stabilizátoroch používajú, čím sa dostanem k vysvetleniu pojmov 3-osý, resp. 6-osý stabilizátor. A tieto pojmy sú najviac používané v popise letového stabilizátora. Veľa vecí zjednoduším, takže puritánov prosím o odpustenie.
3-osý letový stabilizátor
Tie jednoduchšie, často označované ako “3-osé” stabilizátory, sú vybavené len gyroskopmi.
Gyroskop (všeobecne vzaté) o absolútnej polohe lietadla ani netuší, ale veľmi dobre vníma zmenu polohy. V letových stabilizátoroch sa používajú 3-osé gyroskopické senzory - pre každú os lietadla jeden. V súčasnosti bývajú všetky 3 senzory integrované v jednom čipe.
Gyroskopy sú snímače, ktoré sa používajú na meranie uhlovej rýchlosti, teda rýchlosti otáčania (udáva sa v [°/s] ). Na základe tejto veličiny a času otáčania sa dá vypočítať uhlová zmena - čiže nová poloha modelu. Procesor stabilizátora potom pozná nie len rýchlosti otáčania, ale vie novú polohu dopočítať. Vychádza z polohy predchádzajúcej - nie absolútnej, takže aj nová poloha je len relatívna (!) – čo je pre náš účel veľmi podstatné.
Keďže jadrom 3-osého stabilizátora je 3-osý gyroskop, aj samotnému stabilizátoru sa často ľudovo hovorí “gyroskopický stabilizátor”, alebo len “gyro”.
Len pre zaujímavosť: s gyroskopickým senzorom sa dá zrealizovať zátačkomer, ktorý patrí medzi základné letecké prístroje. Pri FPV lietaní je super, keď je na “obrazovke” aj zátačkomer. Je úplne nepostrádateľný pri lietaní podľa prístrojov a FPV lietanie sa tomu veľmi blíži. Na ďalší dôležitý prístroj – umelý horizont, bohužiaľ gyroskopické senzory nestačia.
Výhodou “gyroskopov” (3-osých stabilizátorov) je, že sú lacnejšie než 6-osé stabilizátory. Dokážu však dosť podstatné veci ako je RATE mód (a s trochou fígľov) aj HOLD mód - oba popíšem neskôr. O gyroskopoch sa tu už tiež dosť písalo, napr. tento článok.


.jpg)
Letecké 1-osé piezo gyrá od Turnigy TG-380 a TR-302AD, dole doska stabilizátora RX3S_V2 (čierny štvorček vľavo je 3-osý gyro-senzor)
6-osý letový stabilizátor
Všetky 6-osé stabilizátory majú, okrem gyro-senzorov aj akceleromerte.
Akcelerometre sú senzory merajúce dynamické a/alebo statické zrýchlenie.
Dynamické zrýchlenie – meria sa sila vznikajúca zmenou rýchlosti pohybujúceho sa hmotného telesa (senzora).
Statické zrýchlenie – meria sa sila vzniknutá pôsobením zemskej gravitácie.
Prínosom akcelerometrov je, že (stručne povedané) merajú v ktorom smere naň pôsobí zemská príťažlivosť. Výsledkom je priemet tejto veličiny (zrýchlenia) do jednotlivých osí lietadla (Gx,Gy,Gz). Jednoducho, ak by na model nepôsobili iné zrýchlenia (len “príťažlivosť zemská”), tak pre lietadlo čisto letiace rovnomerne a priamočiaro, by bola zložka Gz rovná 1 a ostatné dve zložky by boli nulové. Ak by bol model niekam “komplikovane” naklonený, žiadna zo zložiek by nebola nulová – celkové gravitačné zrýchlenie by bolo do nich rozložené. Pri lete na chrbte a/alebo v odstredivých figúrach môžu mať niektoré zložky aj záporné hodnoty, dokonca v absolútnej hodnote môžu byť aj väčšie ako 1. Ďalej to už je len matematika ...
Označenie 6-osý letový stabilizátor sa používa asi preto, lebo vo všetkých 3 osiach (X, Y, Z) majú tieto zariadenia po 2 senzory – a to jeden gyroskop a jeden akcelerometer. Spolu teda 6 (kvázi) samostatných senzorov. Hoci na doske bývajú osadené spravidla len 2 senzorické čipy (3D gyroskop a 3D akcelerometer) virtuálne sa tomu hovorí “6-osý stabilizátor”.
Výhodou je, že akcelerometre viac menej priamo dokážu popísať absolútnu polohu lietadla. Ak vie akcelerometer zmerať aj dynamické zrýchlenie, procesor z tohto dokáže odvodiť uhlovú rýchlosť a jej zmenu. Bez akcelerometrov sa nedá realizovať umelý horizont.
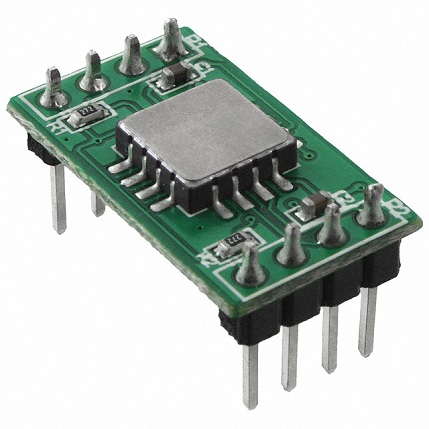
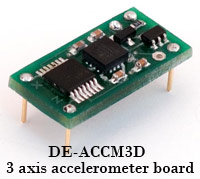
3D senzor MXR9500MZ od fy. MEMSIC (vľavo) a iný senzor uprostred procesorovej dosky
(vpravo).
Ako iste tušíte, súčasné použitie gyroskopov a akcelerometrov sa zdá byť pre letový stabilizátor ideálnym riešením. Gyrá vedia ako obrat začal a ako rýchlo prebieha, akcelerometre v akej polohe začal a kedy sa má obrat ukončiť. Senzory od firmy MEMSIC vedia merať dynamické aj statické zrýchlenia, preto sú dosky letových stabilizátorov (napr. FC-150, FC-151) často osadené dvomi čipmi od tohto výrobcu.
Zaujímavosťou je fyzikálny princíp, ktorý tieto senzory využívajú – prenos tepla molekulami vyhrievaného plynu.
Niektoré modernejšie (a drahšie) 6-osé stabilizátory obsahujú aj rôzne iné vychytávky, ako napr. návratový mód. Musia teda mať (alebo je možné k nim doplniť) GPS senzor, magnetický kompas, výškomer a pod. Okrem schopnosti vrátiť model do “normálnej” polohy vedia model aj doviesť na miesto určenia, napr. na miesto štartu.

Príkladom pokročilého letového stabilizátora môže byť Vector Flight Controller od firmy EagleTree.
Zo skúseností niektorých mojich kamarátov usudzujem, že začínať s príliš pokročilými letovými systémami nemusí byť ten správny začiatok. Ono nestačí ho len mať (cenovo sú asi o jeden rád vyššie), ale je potrebné ho vedieť správne používať.
A k tomu hóódne pomôže byť hóódne dobre “v obraze”. A na to sú (podľa mňa) tie jednoduchšie 3-oj či 6-osé stabilizátory ideálne.
2. Načo mi bude “nejaký” stabilizátor?
Moja odpoveď: Pri lietaní mi bezpečnosť modelu a jeho vybavenia nie je ľahostajná. Nie som medzi modelármi žiadny guru, ale guru-neguru, všetci máme spoločné jedno. Čím je nám model “drahší” tým viacej “trpíme” pri jeho poškodení. Smutné bývajú všetky straty. Každý modelár čo tvrdí niečo iné, je podľa mňa masochista, milionár, nevyliečiteľný frajer alebo tak trošku klamár. Ľudová múdrosť hovorí “Keď dávajú – ber, keď bijú – utekaj!”. Preto si hovorím, že ak mi je stabilizácia dostupná, je hlúposť nepoužiť ju.
Najskôr pár argumentov, prečo niekto stabilizátory nepoužíva. Najčastejšie som sa stretol s dôvodmi: nepotrebujem ho, zvyšujú letovú hmotnosť, obmedzený priestor, modelárska česť a športová čistota, strach zo zníženia celkovej spoľahlivosti, cena.
Niekedy som vycítil aj nezáujem o veci nové-pokrokové, u niekoho možno aj istá (s prepáčením) neschopnosť vedieť stabilizátor použiť - to jediné beriem, nemusíme byť všetci priekopníci. Argument “Keď fúka, tak nelietam!”, ten moc neberiem. U mňa rozhodujú premenné kto to hovorí a koľko to fúka. Myslím si, že aj vietor (pokiaľ nemá pod čapicou ) musí byť pilotov kamarát, inak by sme koľkokrát z domu ani nos nevystrčili. Medzi nami “dievčatami”, ja podobným argumentom hovorím jednoducho – výhovorky! Ale, ...“proti gustu žiaden dišputát !”. Ctená polovička mi roky vtĺka do hlavy “Každý má právo na svoj názor, tak mu ho neber!”. OK – neberiem! Chcem tým len povedať, že koľko RC-súprav, toľko názorov.
Napriek tomu, že ja stabilizátory stále môžem, mám na rádiu čarovný “gombík” a aj ho používam. Ani pre mňa nie je nič krajšie ako totálna pilotáž, bez moderných podfukov. Ak si stabilizátor v aeropláne zapnem, sledujem tým len poistenie jeho bezpečnosti v určitých situáciách.
Mimochodom, prečo je každé veľké lietadlo vybavené auto-pilotom? Tie sa dnes montujú už aj do ultralajtov! Stabilizátory o akých tu píšem(e) sú mladšími bratmi či predchodcami tých súčasných auto-zázrakov.
Stalo sa mi, že som sa pri lietaní stretol s modelármi, pre ktorých je použitie stabilizátora neskutočnou, ba priam až životnou potupou. Nevadí, povedal som si, každý sme nejaký. A v záujme pohodového lietania som sa im do ich modelárskeho ega nemiešal. Stabilizátorom na palube svojho éra som sa samozrejme nepochválil. Naopak, oni neskôr chválili “moju odvahu a letové zručnosti” (hi-hi-hi).
Moje krédo:
Ak stabilizátor mám, tak si ho do éra prihodím a počas lietania sa rozhodnem či ho použijem alebo nie.
Skúsenosť mi hovorí, že čokoľvek odložené do šuplíka nikomu nepomôže. Výnimku dávam vkladným knižkám s dobrými koncami .
<Staršie | tento článok | Novšie>
Napísané: 5. 4. 2021, 08:13 | Prečítané: 10715x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 5
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Statické zrýchlenie je nielen tiažové, ale aj odstredivé pri zatáčaní s konšt. polomerom. Prípadne pri rovnomernom priamočiarom zrýchľovaní/spomaľovaní. Okrem toho ešte existujú inerc. snímače, ktoré vedia merať jednosmernú zložku zrýchlenia a také, ktoré merajú len striedavé zložky (niečo o tom tu: odkaz )
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Počet osí nie je obmedzený - každý výrobca si to definuje po svojom. Z obchodného hľadiska je to pochopiteľné - "čím viac tým lepšie".
Napr. tu odkaz výrobca pridá 3-osý magnetometer a už to ponúka ako 9-osý snímač
 . Pritom snímač obsahuje len 2 typy "fyzických" senzorov - akcelerometer a magnetometer, gyroskop len emuluje.
. Pritom snímač obsahuje len 2 typy "fyzických" senzorov - akcelerometer a magnetometer, gyroskop len emuluje.
Tým pádom by nám aj mohlo byť celkom jedno, aké fyzikálne javy ten ktorý snímač skutočne využíva či emuluje. Podstatný býva vždy výsledok, v tomto prípade informácia o dynamike pohybu modelu, absolútnej polohe a pod.
V tomto článku mi šlo o úvod do problematiky a sám som to nikdy ďalej nerozvíjal. Ako naznačuje aj tvoj komentár, téma je to strašne rozsiahla a technickým pokrokom (nové princípy a technológie) sa ďalej nabaľuje. Takže hlbšie teoretizovanie prenechávam technickej inteligencii :).
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Je možné je použít ve větroni řízeném výškovkou a směrovkou?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Možno by sa to tak aj dalo použiť, ale musel by sa inak polohovať (musel by byť nie naležato, ale stáť na hrane).
Tiež je otázne, či by to u modelu bez krídeliek vôbec malo pozorovateľný vplyv.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
len ten priklad ze preco je v lietadlach prepravujucich ludi tiez stavbilizacia resp.autopilot sa sem vobec nehodil(tie lietadla maju od 25ton do 500t a viac a idu v primom lete niekolko hodin v tme a z cetujucimi nie z nkadom) inak vsetko super Diky
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)