Model na vôdzke (vodítku): stabilizátor výšky v činnosti (2)
O stabilizátore výšky – VýškoState – boli podané len základné informácie.
A jeho činnosti bola venovaná sotva polovica vety: „... hoci už sa mi podarilo nastaviť stabilizátor tak, že udržiava výšku s presnosťou na 5cm.“
Dnes prinesieme aj krátke video VýškoStatu v činnosti.
autor: Janko O. Minulý článok tejto série bol viac-menej venovaný konštrukcii a samotnému zhotoveniu „testovacej stolice“, či vodiacemu ramenu, či ako to správne nazvať.
Minulý článok tejto série bol viac-menej venovaný konštrukcii a samotnému zhotoveniu „testovacej stolice“, či vodiacemu ramenu, či ako to správne nazvať.









Samotný ultrazvukový modul HC-SR04 je určený na meranie vzdialeností v rozsahu 2cm až 5m s presnosťou na 3mm.
Jeho popis činnosti je TU.
A schéma jednej z jeho verzií je na nasledujúcom obrázku:
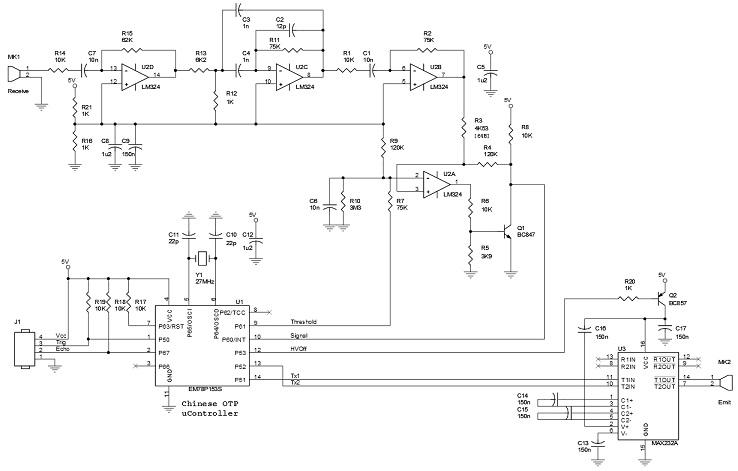
Treba podotknúť, že máme trochu inú verziu modulu: schéma je síce rovnaká, ale rozdiel je v hodnotách niektorých súčiastok a v ich číslovaní (čo nás zo začiatku celkom slušne mýlilo  ), v dizajne plošného spoja a zrejme aj v zapojení mikrokontroléra (ten „náš“ je taktovaný 4MHz kryštálom).
), v dizajne plošného spoja a zrejme aj v zapojení mikrokontroléra (ten „náš“ je taktovaný 4MHz kryštálom).
Ústrednou časťou je (čínsky) mikrokontrolér EM78P153S – v ľavej spodnej časti schémy, ktorý riadi vysielaciu časť s nezvyčajným (ale veľmi vtipným) zapojením obvodu MAX3232 – v pravej spodnej časti schémy. Prijímacia časť modulu je najzložitejšia: tvorí ju štvornásobný (J-FET-ový) operačný zosilňovač TL074 a množstvo pasívnych súčiastok: rezistorov a kondenzátorov. Úlohou prijímacej časti je zosilniť slabý odrazený signál (Echo) a odfiltrovať nežiadúce signály.
Web-stránka „Emil's Projects“ okrem iného prináša aj možné úpravy a zlepšenia ultrazvukového diaľkomerného modulu HC-SR04.
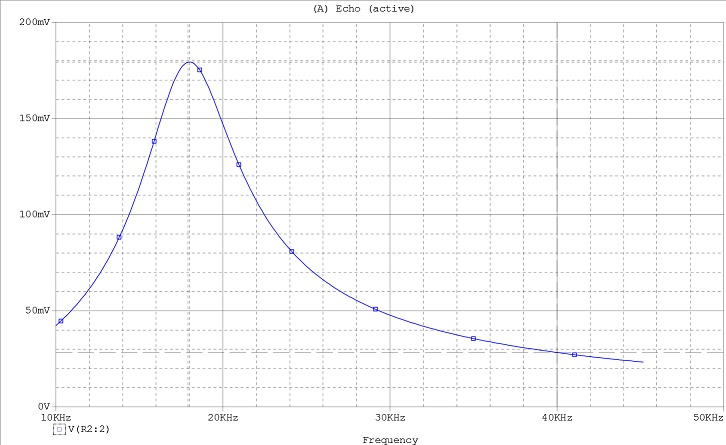
Takto "ujdený" bol vstupný filter Emilovho modulu (namiesto 40kHz bolo maximum na 18kHz).
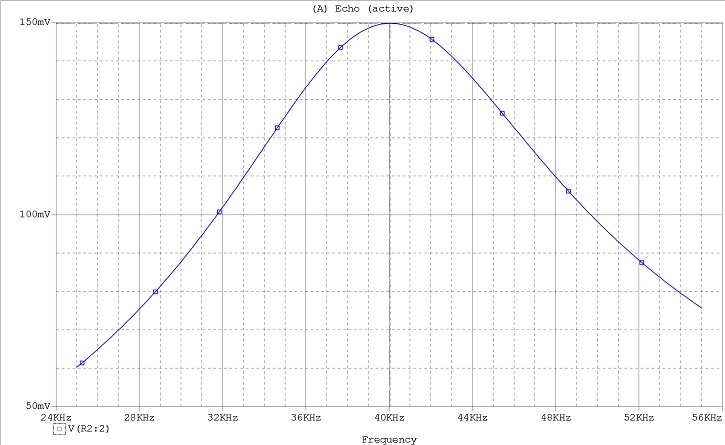
Emilov modul po zmene hodnôt niektorých súčiastok.
My sme "s hrôzou" zistili, že naša verzia modulu nevysiela na kmitočte 40kHz, ale na 43,8kHz. Takže sme museli náš filter doladiť práve na túto hodnotu, hoci nebol až tak "ujdený" ako Emilov modul.
Rovnako ako Emil aj my sme zistili, že starostlivým doladením filtra vstupného obvodu našich modulov je možné zlepšiť ich citlivosť a odolnosť voči rušivým hlukom (a že ich pod modelom s tromi vrtuľami je naozaj dosť  ).
).
Okrem toho sme samozrejme usilovne pracovali aj na programe pre mikrokontrolér PIC12F683, ktorý riadi činnosť samotného stabilizátora výšky. Bola to dobrá škola života, pretože teória regulačných obvodov je síce krásna, ale ich praktická realizácia môže byť niekedy záludná. Po istej dobe sme totiž dospeli k názoru, že asi oželieme „mimimetrovú“ presnosť VýškoStatu: použitie PID regulácie spolu so špecifickým oneskorením reakcie vrtuľového pohonu v podstate vždy viedlo k rozkmitaniu sústavy. A tak sme napokon zložku „I“ (integračnú, ktorá eliminuje regulačnú odchýlku) odstránili a použili len reguláciu PD (Proporcionálno - Derivačnú). „D“ zložku sme získali tak, že sme merali rýchlosť kolísania výšky modelu nad zemou.
Nebudeme to ďalej rozpisovať, lebo drvivú väčšinu modelárov to aj tak nezaujíma a ukážeme si rovno výsledok. Na videu, ktoré si o chvíľu budete môcť pozrieť, je vidieť účinok VýškoStatu. Nakrúcali sme opäť v suteréne nášho domu, model bol na „vodiacom ramene“ a kameru sme situovali tak, aby bolo zrejmé, aké zásahy sú robené do kniplov a vypínačov na vysielači a ako na to reaguje model:
-
v čase 0:03 odblokujem plyn (ukazovákom pravej ruky prepnem páčku so žltým koncom hore – od seba)
-
potom ľavou rukou hýbem kniplom plynu tak, aby som model dostal do požadovanej výšky (všimnite si, že pre jej udržanie je potrebná neustála korekcia polohy páky plynu)
-
v čase 0:16 zapnem stabilizáciu výšky (ukazovákom pravej ruky prepnem páčku s guličkou na konci dole – k sebe)
-
v čase 0:16 až 0:28 je model plne pod nadvládou VýškoStatu, čo dokazujem tým, že odtiahnem ruky od vysielača, aby bolo jasné, že s pákou plynu sa nehýbe, hoci výška modelu nad zemou je (v medziach povolenej regulačnej odchýlky) nemenná
-
v čase 0:28 vypínam VýškoStat (páčku s guličkou na konci prepnem hore – od seba), „ručne“ s modelom pristávam na zem, ľavým kniplom sťahujem plyn a na záver páčkou so žltým koncom (ešte pre istotu aj) zablokujem plyn
Odkaz na video "CL-84 so stabilizátorom výšky"
Keďže je model len v malej výške a navyše tiesnený v malej miestnosti, je trochu „nekľudný“ (občas sa jemne zakolíše zľava-doprava). Máme ale skúsenosť, že vo väčšej miestnosti (v telocvični a predpokladáme, že aj na voľnom priestranstve) a vo väčšej výške (asi od výšky očí hore) je model úplne kľudný.
Samotný modul elektroniky VýškoStatu (doteraz chápaný ako skúšobný - overovací) asi ešte dozná nejaké zmeny. Bude použitý procesor s väčším počtom vývodov, pretože je potrebná signalizácia aktivity VýškoStatu: aj páčkou zapnutý VýškoStat sa totiž v určitých medzných či kritických situáciách automaticky vypne (model prejde na ručné riadenie výšky) a je dobré, aby o tom pilot vedel. Na to by mohla stačiť 3W LED-ka na bruchu modelu: ak svieti, VýškoStat je aktívny. Taktiež sme uvažovali nad ďalšími „vychytávkami“, ktoré by VýškoStat umožňoval:
-
automatické vystúpanie modelu do požadovanej výšky
-
automatické (pomalé a hladké) pristátie modelu
-
diaľkové nastavenie požadovanej výšky
-
informácie o stave VýškoStatu odosielané do telemetrie
Ale netvrdíme, že ich budeme hneď všetky realizovať  .
.
<Staršie | tento článok | Novšie>
Napísané: 18. 1. 2016, 17:25 | Prečítané: 5833x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)