Model na vôdzke (vodítku): cesta ku stabilizátoru výšky (1)
Keby na reťaz: skôr na ťažnú tyč (podobne ako nákladné autá).
Nie že by sme si tým chceli „predchádzať“ Dopravný úrad a jeho Rozhodnutie 1/2015 tak chceli doviesť do Ad Absurdum.
Nie, dôvody sú oveľa prozaickejšie:
Vyvíjame stabilizátor výšky letu pre model CanadAir CL-84.
autor: Janko O. Keď sme presne pred týždňom zverejnili článok „Raz (možno) budú naše psy slobodnejšie ako naše modely“, ani vo sne nám nenapadlo, že práve my sami budeme jedni z prvých, ktorí svoj model takpovediac „priviažu na reťaz“.
Keď sme presne pred týždňom zverejnili článok „Raz (možno) budú naše psy slobodnejšie ako naše modely“, ani vo sne nám nenapadlo, že práve my sami budeme jedni z prvých, ktorí svoj model takpovediac „priviažu na reťaz“.









Keďže zatiaľ „outdoorové“ podmienky nie sú súce na skúšky CL-84 v doprednom (horizontálnom) lete, venovali sme sa aspoň letu vertikálnemu – vznášaniu sa. Počas dlhých vianočných prázdnin sme boli v telocvični na Murgaške každý pracovný deň. Zdokonalili sme štart, pristátie, „sunutie“ modelu bokom doľava – do prava, vpred – vzad, otočky na mieste … Len to (zdanlivo) najjednoduchšie – visenie vo vzduchu v konštantnej výške nie je také, ako by sme si predstavovali.
Hoci sa to nezdá, tak udržať skoro dvoj-kilový model v nejakej výške s presnosťou na centimetre (alebo aspoň na decimetre) vôbec nie je jednoduché  .
.
A tak mi napadlo: vyvinúť a urobiť stabilizátor výšky pre model CanadAir CL-84. Na meranie výšky, teda vzdialenosti „brucha“ modelu od zeme nie je vhodné použiť (atmosférický) tlakomer. Jednak potrebujeme merať malé výšky a jednak sa tu „hráme“ na centimetre. Atmosféricko-tlakomerný výškomer meria s presnosťou skôr na metre ako centimetre a vplyvom prirodzených zmien atmosférického tlaku môže nameraná výška kolísať aj o päť či desať metrov.
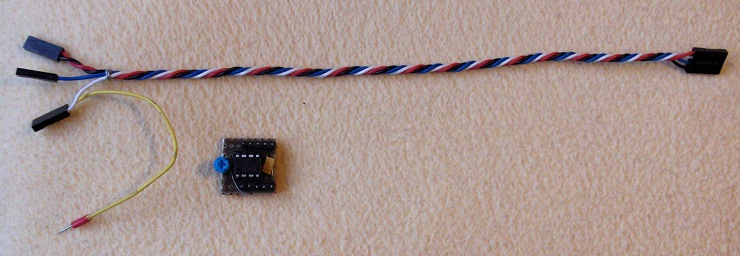
A tak voľba padla na ultrazvukový „diaľkomerný“ modul HC-SR04. Ešte pred časom Miroslav zopár takých modulov lacno kúpil na Ebay-i a tak stačilo len siahnuť „do šuplíka“. Nasledovalo množstvo pokusov a meraní počas niekoľkých uplynulých dlhých zimných večerov a výškomer začal dostávať reálnejšie kontúry. Realizovali sme modul elektroniky, osadený mikrokontrolérom PIC12F683:

Na „brucho“ modelu sme (zatiaľ dočasne) uchytili ultrazvukový diaľkomerný modul HC-SR04:


Ak projekt dopadne dobre, modul bude umiestnený vnútri trupu modelu. Vyrobili sme potrebnú kabeláž, ako obvykle „ušitú“ na mieru:
Do modelu, konkrétne do priestoru pre elektroniku sme umiestnili modul elektroniky stabilizátora výšky:
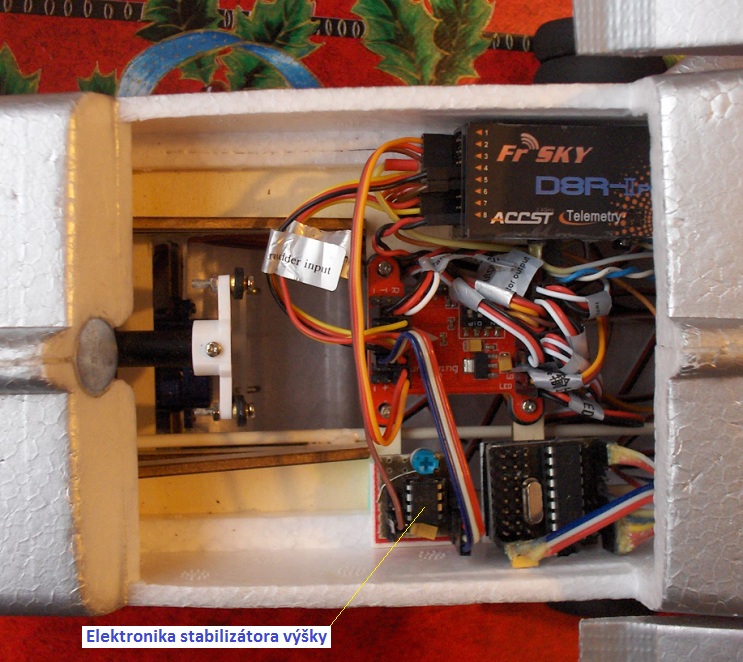
Tu je modul čiastočne zakáblovaný.
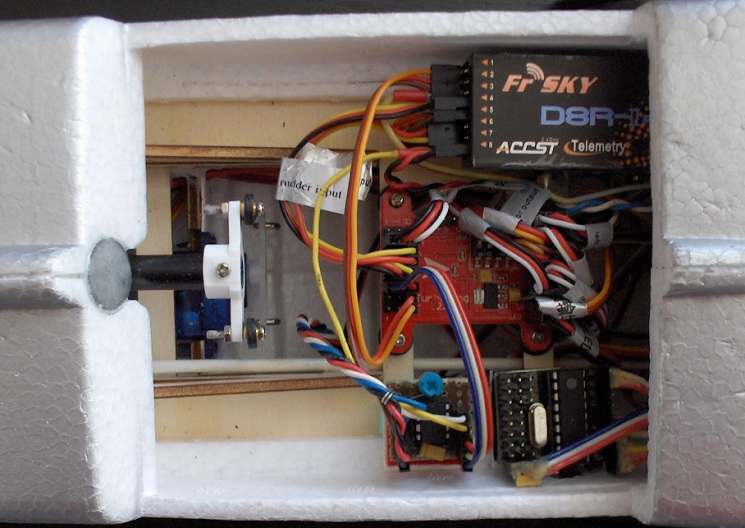
A tu už je modul plne prepojený s ostatnou elektronikou modelu.
Na stole nám všetko krásne „chodilo“, ale bolo nám jasné, že v reálnych podmienkach, keď sa začne uplatňovať zotrvačnosť „rozhýbanej“ hmoty modelu, prízemný efekt – akýsi vankúš vzduchu pod modelom a jeho výrazná „pružnosť“, významné (a nepríjemné) časové oneskorenia medzi zaúčinkovaním regulačnej sľučky (zmena otáčok motorov) a zmenou vertikálnej rýchlosti modelu …, bude všetko inak a oveľa zložitejšie. A tak vyvstala otázka: Ako to odskúšať v reálnych podmienkach a ako systém „doladiť“ k plnej spokojnosti?
Prázdniny sa medzitým skončili a prístup do telocvične na Murgaške sa stal problematickým. Navyše sme si nevedeli predstaviť, ako niečo zmeníme v programe „VýškoStatu“ (také hrdé meno dostal  ), bežíme do telocvične, tam zistíme, že to nie je ešte ono (alebo je to ešte horšie ako predtým), bežíme domov, premýšľame, niečo zmeníme v programe, bežíme do telocvične, tam zistíme …
), bežíme do telocvične, tam zistíme, že to nie je ešte ono (alebo je to ešte horšie ako predtým), bežíme domov, premýšľame, niečo zmeníme v programe, bežíme do telocvične, tam zistíme …
Bolo nám jasné, že vývojové aj skúšobné pracovisko musí byť prakticky na jednom mieste, najlepšie u nás doma. Najskôr som sa pokúšal realizovať praktické skúšky VýškoStatu u nás pri dome na vydláždenej ploche 2,5x2,5m pred „chatkou“. Keďže fúkal nepríjemný vietor, tak som jednou rukou model držal za predok a druhou rukou som „baštrngoval“ s pákami a prepínačmi vysielača.
Ešte dobre, že som model držal, lebo reakcie systému po prepnutí do režimu „Stat“ v spojení s vetrom by isto-iste spôsobili skazu modelu. Pochopil som, že pokým nebude systém umravnený, tak model nemôže byť úplne voľný. Jedinú voľnosť môže mať v smere hore – dole a aj tu musí byť pripravená zasiahnuť „ruka veľkého brata“.
A tak som musel vymyslieť akési vodiace rameno (ktoré odbremení moje vlastné rameno  ), ktoré modelu vymedzí spomínané možnosti pohybu. A keďže nemám sústruh ani frézu, muselo to byť síce primitívne, ale zato plne funkčné „zariadenie“. Výraz „zariadenie“ je silno nadsadený: je to metrová drevená tyčka a kúsok vhodne tvarovaného oceľového drôtu hrúbky 2,5mm, jedna skrutka s matičkou a dva uholníky. Celé som to „zbúchal“ asi za pol hodiny. A tak sa poďte pozrieť ako to vyzerá a ako to funguje:
), ktoré modelu vymedzí spomínané možnosti pohybu. A keďže nemám sústruh ani frézu, muselo to byť síce primitívne, ale zato plne funkčné „zariadenie“. Výraz „zariadenie“ je silno nadsadený: je to metrová drevená tyčka a kúsok vhodne tvarovaného oceľového drôtu hrúbky 2,5mm, jedna skrutka s matičkou a dva uholníky. Celé som to „zbúchal“ asi za pol hodiny. A tak sa poďte pozrieť ako to vyzerá a ako to funguje:
Najprv bolo treba vymyslieť, ako to uchytiť o model tak, aby model mal potrebné „stupne voľnosti“, ale tie nepotrebné aby nemal:

Aby som mal (pokiaľ možno obidve) ruky voľné pre potreby ovládania vysielača, prípadne pre tlmenie „rozkmitanej sústavy“ (čo sa pri regulačnej sľučke občas stáva  ), druhý koniec ramena bol otočne uchytený o môj pracovný stôl (v suteréne nášho domu):
), druhý koniec ramena bol otočne uchytený o môj pracovný stôl (v suteréne nášho domu):

Model je ukotvený a to „čudo“ pod ním je 1,5mm preglejka, ktorá slúži ako odrazná plocha ultrazvukových vĺn:

No a takto to vyzerá v praxi:

Model tesne nad zemou.

Model trochu vyššie.

Ešte vyššie.

A toto už je asi priveľa. Naraz fotiť a ovládať vysielač je niekedy ťažké .
Ako práca tejto „testovacej stolice“ vyzerá v pohybe si môžete pozrieť na nasledujúcom videu „Testovacia stolica stabilizátora výšky“.
Treba podotknúť, že som pre istotu nakrúcal v režime ručného ovládania výšky, hoci už sa mi podarilo nastaviť stabilizátor tak, že udržiava výšku s presnosťou na 5cm. Ale ešte treba na VýškoState trochu popracovať, minimalizovať neustále kolísanie výšky, hoci v pomerne malej miestnosti sa vzduch odráža od podlahy a od stien a takto „rozhýbaný“ sa nepredvídateľne vracia k modelu a destabilizuje jeho polohu.
Aj keby sa projekt VýškoStatu nepodarilo dotiahnuť do úplne dokonalého stavu, tak samotná testovacia stolica je výbornou pomôckou pre nácvik riadenia niektorých letových fáz modelu CL-84 v stiesnených (a pritom veterne-náročných) domácich podmienkach .
<Staršie | tento článok | Novšie>
Napísané: 15. 1. 2016, 12:18 | Prečítané: 6142x | Kategórie: Iné | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)