CanadAir CL-84: význam správneho nastavenia
Tým nastavením máme na mysli nie len správne nastavenie a správnu geometriu samotného modelu, ale v tomto prípade aj dôkladné „napípanie“ vysielača.
Dôvodom je to, že CL-84 má dva samostatné letové režimy: režim vertikálny (vznášanie (sa) - vis, štart a pristátie) a režim horizontálny (samotný „dopredný“ let).
A práve ten prvý – vertikálny režim si vyžaduje trpezlivosť a presnosť.
autor: Janko O. CanadAir CL-84 je model, ktorý nám dal zatiaľ najviac „zabrať“, čo sa týka jeho správneho nastavenia.
CanadAir CL-84 je model, ktorý nám dal zatiaľ najviac „zabrať“, čo sa týka jeho správneho nastavenia.









Nastavenie správnej geometrie modelu, minimalizáciu vôlí riadenia a nastavenie výchyliek sme popisovali hneď v prvých častiach tejto neformálnej minisérie.
V minulej časti (CanadAir CL-84: prvý krát vo vzduchu) sme popisovali jeho prvé nesmelé minúty vo vzduchu a pridali sme aj video. Z jeho záberov je zrejmé, že riadiť takýto model je diametrálne odlišné od riadenia bežného „krídlatého“ modelu a že aj pri maximálnom sústredení je to slušný adrenalín a riadna fuška. Ale to je v príkrom rozpore s nami presadzovaným štýlom pohodového lietania. Navyše, aj pri najväčšej snahe som nezabránil tomu, že model sa tesne pred „odlepením“ od zeme viac-menej potácal a aj samotné „visenie na vrtuliach“ pôsobilo dojmom, že buď model alebo pilot je pod vplyvom alkoholu  .
.
Hoci som sa predtým snažil nastaviť exponenciály, dvojité výchylky, krivku plynu a iné možnosti vysielača podľa najlepšieho vedomia a svedomia, uvedomoval som si, že počas visenia musím mať neustále dosť pritiahnutú páku výškovky a náklon modelu treba mierne korigovať kniplom „krídeliek“ (inak by sa model sunul bokom). To bránilo zmenšeniu výchyliek, ktoré bolo veľmi žiadúce, vzhľadom na mimoriadnu citlivosť modelu na predo-zadný a bočný náklon.
Aby ste si urobili predstavu, tak zle nastavený, zle „vytrimovaný“ model CanadAir CL-84 riadený vysielačom s veľkými výchylkami má letový (vlastne „visiaci“) prejav približne ako na videu Flyzone CL 84 Dynavert (a takýchto videí s podobným letovým prejavom je plný internet).
A tak keď „medzi sviatkami“ prišiel Miroslav do Bystrice (BB), rozhodli sme sa, že CanadAir-a „umravníme“. Analýzou videí z internetu, ale aj toho nášho (Skúška CL-84) sme postupne menili mnohé nastavenia RC vysielača (môjho Turnigy i10), pretože na modeli nebolo treba meniť skoro nič (okrem posunutia pohonnej LiPol batérie o asi 2cm dozadu).
Môj vysielač umožňuje nastaviť až 5 letových režimov (Conditions), čo ja rád využívam:
.jpg)
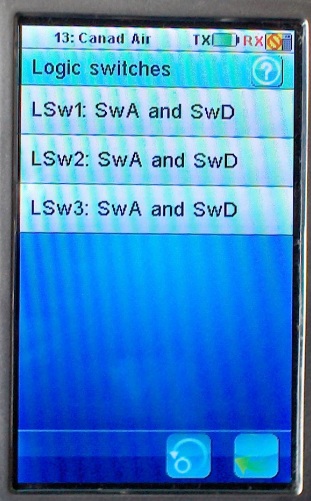
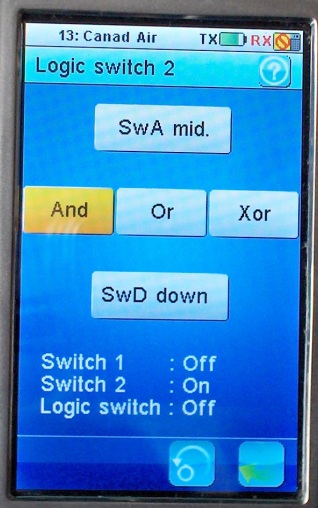
Na ich prepínanie som použil aj (3) logické prepínače (Logic switches):
Aby sme eliminovali nutnosť počas visenia (vznášania sa) modelu mať knipel neustále vychýlený, použili sme (kanálový) Offset (Channels offset).
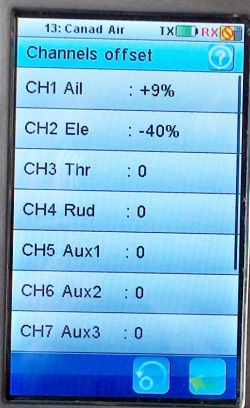
Ten umožňuje väčší rozsah posunu neutrálnej polohy ako klasický Trim a môže byť pre rôzne letové režimy rôzny, narozdiel od Sub-trimov.
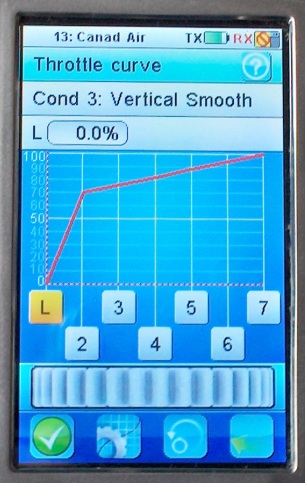
Krivku plynu sme urobili ešte viac „zalomenú“ (jej hlavná časť je menej strmá) ako predtým, čo umožnilo ešte jemnejšie ovládanie plynu vo vise:
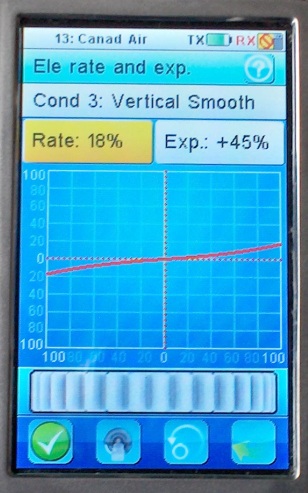
Pre čo najpresnejšie ovládanie pohybu modelu vo vise sme výchylky predo-zadného náklonu (Elevator – výškovka) znížili na 18%:
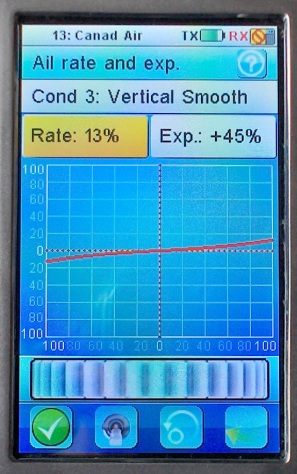
a výchylky bočného náklonu (Ailerons – krídielká) dokonca len na 13%:
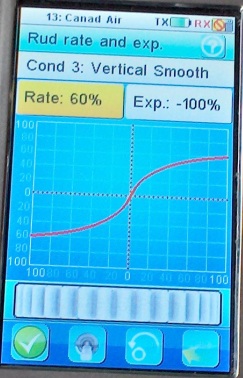
Po praktických skúsenostiach s ovládaním otáčania modelu okolo zvislej osi, sme na nakláňanie zadného motora (Rudder – Smerovka) použili trochu neobvyklú charakteristiku: „opačnú“ exponenciálu:
Hoci sa niekomu môže zdať, že realizácia spomínaných nastavení trvá sotva zopár minút, tak nám to trvalo 2 dni. Jednak sme mali len 4 sady pohonných batérií (každá poskytla len asi 5 minút letu), taktiež sme efekt nastavenia mohli overiť len prakticky – v telocvični, do ktorej sme mali prístup len v dohodnutých (obmedzených) termínoch a hlavne: nastavenie akéhokoľvek parametru to bol proces. Buď pridať hodnotu (percentá), po zistení, že je to veľa zase ubrať a tak dookola, pokiaľ to nebolo akurát. A potom hurá na ďalší parameter.
Výsledkom je kultivovaný letový prejav modelu vo vise, kedy stačí len pridať plyn a CanadAir sa vznesie úplne sám, bez toho, že by sa niekam bezdôvodne sunul. Stačí len plynom udržiavať výšku. Na videách Miroslav dokonca občas rozpaží ruky, aby dokázal, že na udržanie stabilnej polohy, model nie je potrebné vôbec riadiť.
Však pozrite si naše videá:
Video CL-84 - 001
Pri nakrúcaní ďalšieho videa som si postupne ľahol na palubovku telocvične a Miroslav sa vznášal nado mnou:
Video CL-84 - 005
Video CL-84 - 007
Tu zas Milan kázal, aby Miroslav lietal okolo jeho vztýčenej päste:
Video CL-84 - 008
<Staršie | tento článok | Novšie>
Napísané: 2. 1. 2016, 12:08 | Prečítané: 5681x | Kategórie: Lietanie | Napísal: admin |
Komentáre: 2
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)