Stavebnica modelu CanadAir CL-84 Dynavert: úpravy – 2. časť
autor: Janko O. Dnes pokračujeme v popise úprav, ktoré sme sa rozhodli urobiť na tejto stavebnici.
Dnes pokračujeme v popise úprav, ktoré sme sa rozhodli urobiť na tejto stavebnici.









Spolu s mojim bratom Miroslavom sme zrejme viac ako niektorí iní modelári citliví na správnu geometriu modelu. Čo to je geometria modelu a ako všelijako sa môže prejavovať, sme spomínali v sérii článkov, venovanej tejto téme.
A tak sme sa pozornejšie pozreli na (aspoň provizórne) skompletovaný model CL-84 a zistili sme, že aj tu sa (čo sa týka úprav geometrie) môžeme „vyšantiť“. Prvé, čo nám udrelo do očí, bola „klasika“: nerovnobežnosť hlavného krídla a vodorovnej chvostovej (vodorovné ocasní) plochy (výškovky). Po krátkom skúšaní sme zistili, že na správne miesto vložený pásik z plastovej výstražnej tabuľky hrúbky 0,8mm problém hravo vyrieši.

Ďalšie prehrešky voči správnej geometrii plošníkov (lietadiel s nosnými plochami) sme nenašli.
Lenže CanadAir CL-84 Dynavert nie je len tak obyčajný plošník. Keďže je to konvertoplán, tak v jednej z jeho dvoch základných konštalácií ho vo vzduchu nedrží vztlak nosných plôch, ale ťah troch motorov. A tak je predpoklad, že aj orientácia motorov by mala mať nejakú geometriu. No ale nemala.
Prvou úlohou bolo minimalizovať vôle v ovládaní nakláňania zadného motora. To sme urobili „jedným vrzom“, keď sme minimalizovali vôle všetkých ovládaných elementov modelu. Potom však prišiel rad na dva hlavné nosné motory na krídlach. A tam veru nebolo všetko „s kostolným poriadkom“.
Ako prvé sme si všimli, že jeden z motorov je v motorovej gondole „otopený“ viac ako ten druhý. A tak sme gondoly demontovali a s prekvapením sme zistili, že jeden motor je o krídlo uchytený pomocou plastovej (vylisovanej) motorovej prepážky, avšak motorová prepážka druhého motora bola laserom vyrezaná z preglejky. Nechápavo sme krútili hlavou a dali sme sa do ďalšieho merania:
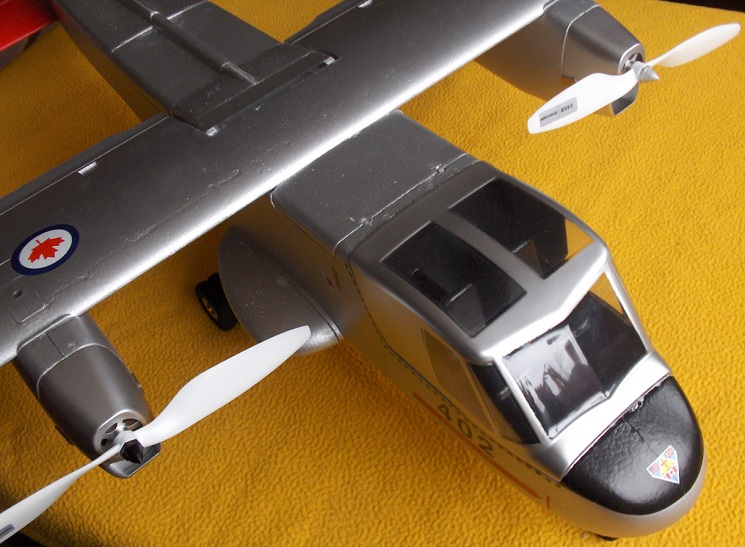
Keď sme sa na vrtule pozreli z tohto pohľadu:

tak sme zistili, že je všetko OK: pomyselné predĺžené osi motorov sa „nezbiehali“ ani „nerozbiehali“. Avšak keď sme sa pozreli z tohto pohľadu:

tak sme zistili, že os jedného motora smeruje trochu dole a os druhého motora trochu hore. To, čo vidíte na obrázku je stav už po oprave, kde motory „neškúlia“ (nešilhají), ale v pôvodnom stave roviny točiacich sa vrtúľ isto neboli rovnaké. Samozrejme so všetkými následkami na letové vlastnosti, ktoré s tým súvisia.
Najprv sme si neboli istí, či je to nedostatok alebo zámer. Ale pozornou analýzou množstva fotografií a videí sme zistili, že roviny vrtúľ majú byť totožné.
A tak bolo potrebné vyrobiť niekoľko rôznych hliníkových podložiek tých správnych tvarov a rozmerov. Ani si netrúfame spočítať, koľkokrát sme motory odmontovali, vložili podložky, motory zamontovali, skrutky pevne dotiahli, kontrolovali rovnobežnosť a následne všetko odmontovali a podložky znovu upravili.
Dôvod zväčšenia účinnej plochy výškovky sme už spomínali v minulej časti, takže teraz ukážeme fotografiu:

Na jej predĺženie sme použili polotovar zakúpený vo Zvolenskej modelárskej predajni – odtokovú lištu. Tú sme k pôvodnej výškovke prilepili sekundovým lepidlom, potom zľahka pretmelili šľahaným tmelom, prebrúsili, nalakovali Purlakom a po zaschnutí prelepili striebornou páskou Den Braven. Skúšali sme aj iné pásky (hlavne kvôli ich farbe), ale kvalita ich lepidla lepidlu na páske Den Braven nesiahala ani len po členky.
Obdobne sme upravili odtokovú hranu aj na hlavnom krídle. Pohľad zhora:

a pohľad zdola:

Po skompletovaní modelu sme overili funkciu preklápania krídla a s tým súvisiaceho priklápacieho „prístrešku“. Poloha 3 axis - „visenie na vrtuliach“:
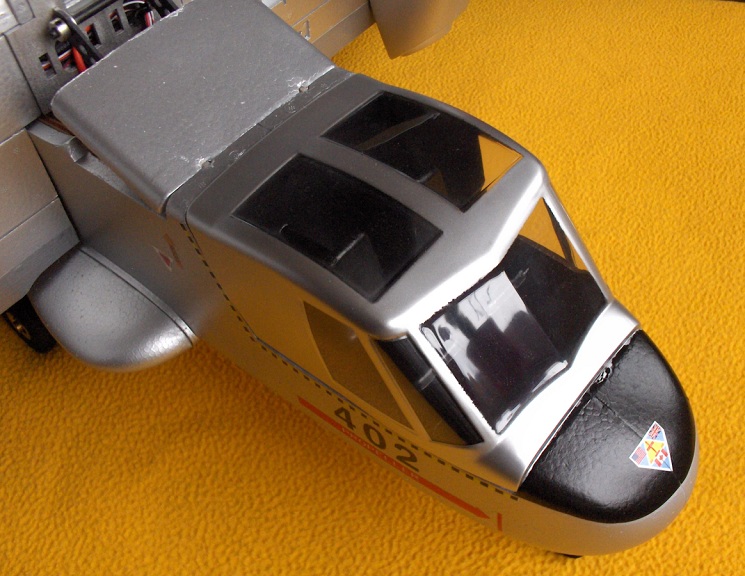
Na polceste ku klasickej plošníkovej polohe:

Normálna poloha: prístrešok sa automaticky zaklapne do aerodynamickej polohy:
Nedá nám, aby sme nespomenuli ešte jeden drobný problém, ktorý sa vyskytol pri kompletácii palubnej kabeláže. Treba priznať, že výrobca stavebnice situáciu modelárom veľmi uľahčil, keď na koniec každého káblika (tesne pri konektore) umiestnil samolepku s jeho označením. Potom stačilo nazrieť do manuálu a na základe tohto obrázka:
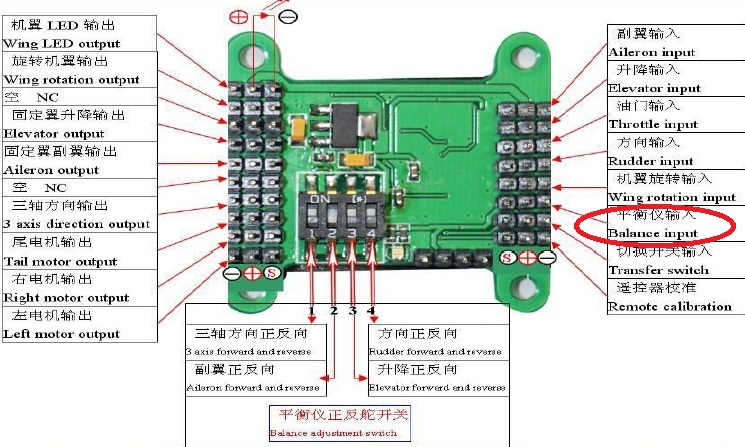
zasunúť konektor káblika s označením napr. „Elevator output“ do protikusu s rovnakým označením („Elevator output“). Kto by s tým mal problém, mohol sa orientovať podľa označenia z čínskych znakov  .
.
Avšak ani čínske znaky nám nepomohli, keď sme nevedeli zistiť, aký konektor zasunúť do protikusu v stabilizačnej jednotke s označením „ Balance input “ (na obrázku v červenej elipse). Taký káblik v modeli nebol a ani manuál nič viac neprezradil. Začali sme pátrať po internete, ale buď tam nebolo žiadne upresnenie, alebo sa modelári rovnako ako my pýtali: „Čo zapojiť do konektora Balance input?“ Ale odpovede sa nedočkali. A tak nám bolo jasné, že si to musíme zistiť sami metódou Pokus – Omyl. Podarilo sa nám to na 50%, čiže realizovali sme pokus a omyl sa (našťastie) nekonal.
Do tohto vstupu (input) sme priviedli signál z vysielača (myslím, že 7. kanál) a zistili sme, že sa ním zapína alebo vypína stabilizácia letu, keď sú krídla v normálnej (vodorovnej) polohe. Ak sú prichádzajúce impulzy širšie ako asi 1700μs, stabilizácia je vypnutá (Off). Ak sú užšie alebo žiadne (v konektore nie je žiadny káblik zapojený), stabilizácia je zapnutá (On). Zapínanie nie je plynulé (čiže žiadna regulácia miery stabilizácie), tak ako sme zhýčkaní z AssOrxu alebo Open Stabilizeru, ale len naplno zapnuté alebo úplne vypnuté.
Keď už sme boli v tom, tak sme stabilizáciu (len tak „nasucho“) otestovali a treba pochváliť, že disponuje nami obľúbeným Dynamickým riadením stabilizačného efektu. Stabilizácia je typu Hold (okrem zadnej vrtule, tá je stabilizovaná módom Rate), takže žiadne obyčajné „gyrovanie“ (po niekoľkoročných skúsenostiach si dovolíme konštatovať, že stabilizácia typu Rate (obyčajné gyrovanie) je oproti stabilizácii Hold len stabilizáciou 3. triedy). Stabilizačná jednotka v CL-84 nemá žiadne mäkké ale ani tvrdé odpojenie, ktoré sme kritizovali v stabilizačných systémoch FY-30A či Guardian. Nemá totiž žiadne odpojenie, čo má u tohto modelu svoju logiku. Toto nie je model, s ktorým by ste mali robiť nejakú 3D akrobaciu (a myslím, že ani žiadnu neurobíte). Tento model za normálnych okolností letí vodorovne, maximálne sa v zákrutách mierne nakláňa na jednu alebo na druhú stranu, prípadne dopredu a dozadu, ak mení výšku. Pri pustení kniplov do neutrálu sa model automaticky vráti do vodorovnej (predtým „levelovaním“ nakalibrovanej) polohy, takže žiadne „odpojenie sa“ od predchádzajúcej a zachytenie novej stabilizovanej polohy nehrozí. Mäkké prechádzanie (tzv. mäkké odpojenie) z jednej stabilnej polohy do druhej stabilnej polohy dokáže len AssOrx a Open stabilizer verzie Ed_10.
Poslednou témou dnešného článku je „krivka plynu“. Pri bežných motorových modeloch spravidla nie je nutné nejak dramaticky meniť jej lineárny tvar. Avšak pri modeloch, ktoré dokážu visieť na vrtuliach, medzi ktoré CanadAir CL-84 Dynavert patrí, je jemné a presné ovládanie plynu nutnou podmienkou hladkých štartov a pristátí. A tak sme si pre začiatok, pre letový režim „VTOL“ (kolmý štart a pristátie) nastavili takúto krivku ovládania plynu:

Na základe praktických skúseností ju neskôr môžeme vhodne korigovať.
<Staršie | tento článok | Novšie>
Napísané: 29. 11. 2015, 17:21 | Prečítané: 8426x | Kategórie: Stavba modelov | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)