Stavebnica modelu CanadAir CL-84 Dynavert: úpravy – 1. časť
Model o pár dní skutočne aj prišiel.
Hoci sa jedná o stavebnicu triedy PNF (Plug aNd Fly = Zapoj a leť), niekomu sa môže zdať, že nám trvá akosi pridlho, kým prakticky hotový model „spojazdníme“.
autor: Janko O. Už to je presne 3 týždne, čo sme zverejnením článku „(Tak teda) S čím lietať?“ avizovali, že sme na HobbyKingu objednali stavebnicu modelu s kolmým štartom (VTOL – Vertical TakeOff and Landing = Zvislý štart a pristátie) CanadAir CL-84 Dynavert.
Už to je presne 3 týždne, čo sme zverejnením článku „(Tak teda) S čím lietať?“ avizovali, že sme na HobbyKingu objednali stavebnicu modelu s kolmým štartom (VTOL – Vertical TakeOff and Landing = Zvislý štart a pristátie) CanadAir CL-84 Dynavert.









Pravda je však taká, že to boli „objektívne príčiny“, ktoré spôsobili toto zdržanie.
Jednou z príčin bolo nečakane dobré počasie v prvej polovici novembra (listopadu). (Že sa ľudia vyhovárajú na zlé počasie, to je normálne. Ale že sa niekto vyhovára na dobré počasie, to už je vrchol!  ) Áno, je to tak. Nečakane pekné a relatívne teplé novembrové dni spôsobili, že ma manželka „prikvačila“ a musel som povinne vykázať nejakú činnosť aj okolo domu a najmä na záhrade. Tieto „nútené práce“ ma natoľko vyčerpali, že na kompletáciu modelu som nemal ani pomyslenie
) Áno, je to tak. Nečakane pekné a relatívne teplé novembrové dni spôsobili, že ma manželka „prikvačila“ a musel som povinne vykázať nejakú činnosť aj okolo domu a najmä na záhrade. Tieto „nútené práce“ ma natoľko vyčerpali, že na kompletáciu modelu som nemal ani pomyslenie  .
.
Pekné „neskoro-babo-letné“ dni som tiež využil na to, aby som sa rozlúčil s vetroňmi: viď články „Rozlúčka s vetroňmi - 2015“ a „Rozlúčka s (babím letom a) vetroňmi – 2015 – 2. časť“. Tí čo ma poznajú vedia, že ja sa s neskorým babím letom a s vetroňmi lúčim ťažko – veľmi ťažko, na etapy, aj niekoľko dní  . A tak mi dúfam nikto nezazlieva, že som stavebnicu takpovediac strčil do kúta a išiel radšej na kopec.
. A tak mi dúfam nikto nezazlieva, že som stavebnicu takpovediac strčil do kúta a išiel radšej na kopec.
Ďalším faktorom zdržania kompletácie modelu CL-84 bolo to, že na základe jeho podrobnej obhliadky a tiež na základe analýzy letových videí na YouTube bolo rozhodnuté, že stavebnica bude musieť absolvovať „nejaké“ úpravy:
-
inštalácia našej (PC) telemetrie: poznať počas letu stav pohonnej batérie a množstvo spotrebovanej energie je obzvlášť u tohto modelu životne dôležité.
-
doplnenie ovládania smerovky. Letové videá jasne ukazujú, že bez toho v zákrutách model letí bokom (tzv. nedotáčavosť).
-
keď už bude mať model riadenú smerovku, prečo nevyužiť pridané servo aj na riadenie predného kolesa?
-
zväčšiť (ovládanú) plochu výškovky: letové videá ukazujú, že pri prechode z horizontálneho do vertikálneho letu aj plná výchylka výškovky (v návode zdôrazňovaná) nie úplne odstráni „zhúpnutie“ modelu.
-
zväčšiť hĺbku hlavného krídla (predĺženie, „zoštíhlenie“ a súčasné spevnenie odtokových hrán): toto opatrenie sa nám osvedčilo u modelu Sky Mule, čo je tiež pomerne ťažký dvojmotorák s veľkým ťahom.
-
odstrániť všetky „čínske“ nedorobky: minimalizovať vôle na všetkých tiahlach medzi servami a ovládanými plochami, zrovnať všetky výrobné „nezrovnalosti“ a pod.
-
upraviť nevyhovujúcu „geometriu“ modelu: tu okrem rovnobežnosti plôch hlavného krídla a výškovky bolo nutné napraviť aj netotožné roviny otáčania hlavných vrtúľ.
Ak si uvedomíte, že každá táto úprava si vyžaduje určitý čas, tak vám vyjde, že to celé trvalo desiatky hodín: mnohokrát viac premýšľania, vymýšľania, merania a skúšania, ako samotných úprav.
Ale poďme sa na jednotlivé úpravy pozrieť postupne:
Doplnenie ovládania smerovky a riadenia predného kolesa som zlúčil do jedného bodu, pretože to spolu súvisí, pričom na obe činnosti je použité jedno spoločné servo:
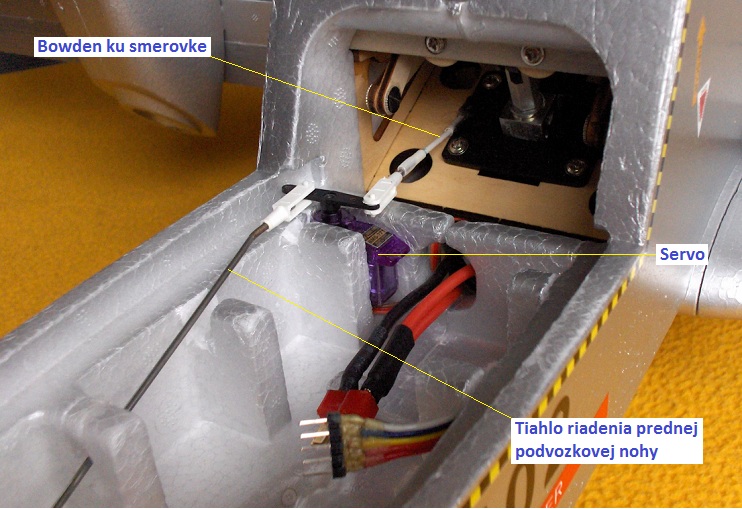
Na ovládanie smerovky som použil plastový bowden a na ovládanie riadenia prednej podvozkovej nohy sa mi jednoduchšie javilo použitie pevného tiahla. Konkrétna realizácia je dobre vidieť na nasledujúcej fotografii:
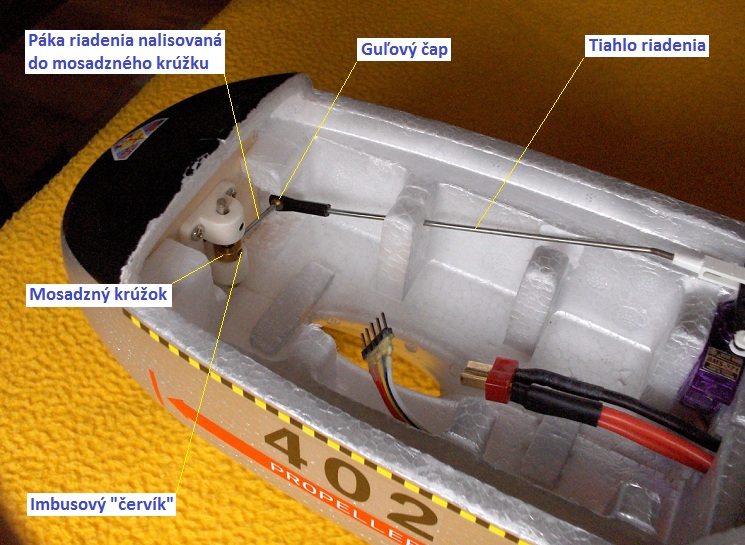
Trochu viac premýšľania vyžadovalo zhotovenie páky riadenia (nebola súčasťou stavebnice). Plastové páky, ktoré som mal doma, z rôznych dôvodov nevyhovovali a tak som navŕtal zaisťovací mosadzný krúžok (bol v stavebnici) a do jemnučkého kónusu zabrúsil koniec „ramena“ páky. To som opatrne za studena natesno nalisoval do zaisťovacieho krúžku. Na opačný koniec ramena som podobne nalisoval (a epoxidom poistil) mosadznú guľôčku guľového čapu riadenia. Tu je detailný pohľad:
Výsledkom je to, že táto nádherná „dvojmontáž“:

je ovládateľná a je v „prirodzenej“ polohe a nie v takej, akú možno vidieť na niektorých obrázkoch či videách:

Zfunkčnenie ovládania smerovky tiež nebolo zložité. Zopár „radikálnych“ rezov nožíkom, trochu brúsenia, trochu modelárskej striebornej farby Revell (zakúpenej v modelárskej predajni vo Zvolene), dva modelárske „pánty“ a trochu podobnej modelárskej „bižutérie“ a výsledok vyzerá takto:

Význam "korekčnej vložky" súvisí s nápravou geometrie modelu a bude vysvetlený v budúcej časti.
Najťažším „orieškom“ bolo nájdenie najlepšej a najpriamejšej cesty pre plastový bowden od serva v prednej časti modelu, k smerovke vzadu, pričom takmer neprekonateľnou prekážkou bol pomerne komplikovaný a rozmerný mechanizmus naklápania (pretáčania) hlavného krídla. Súčasne by bowden nemal zavadzať ničomu inému. A tak som po dlhom hľadaní, skúšaní, meraní, vŕtaní a brúsení uložil bowden tak, že (snáď) naozaj ničomu nezavadzia a pritom je takmer úplne rovný:
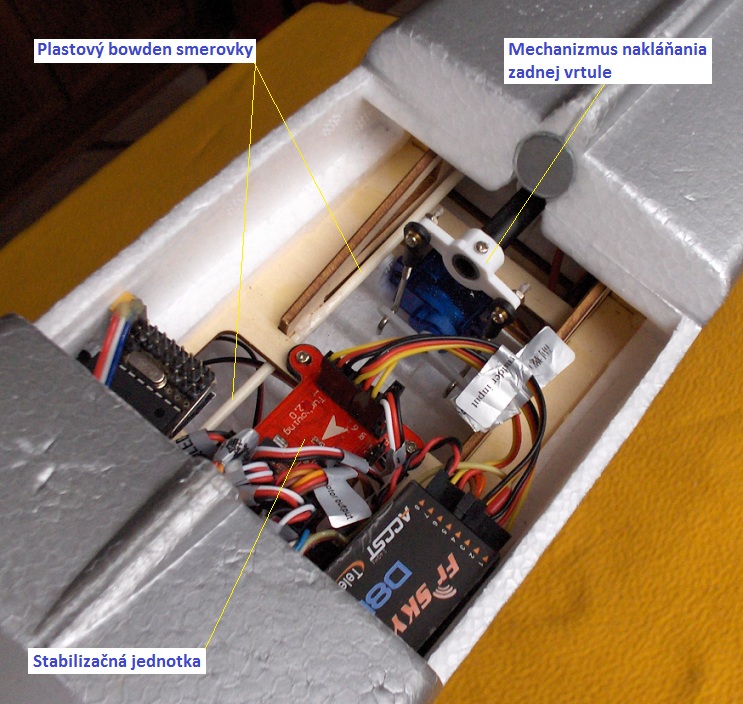
Tento obrázok už dáva predstavu aj o rozmiestnení elektroniky v modeli. Lepší pohľad, vrátane popisu niektorých častí, je však tu:
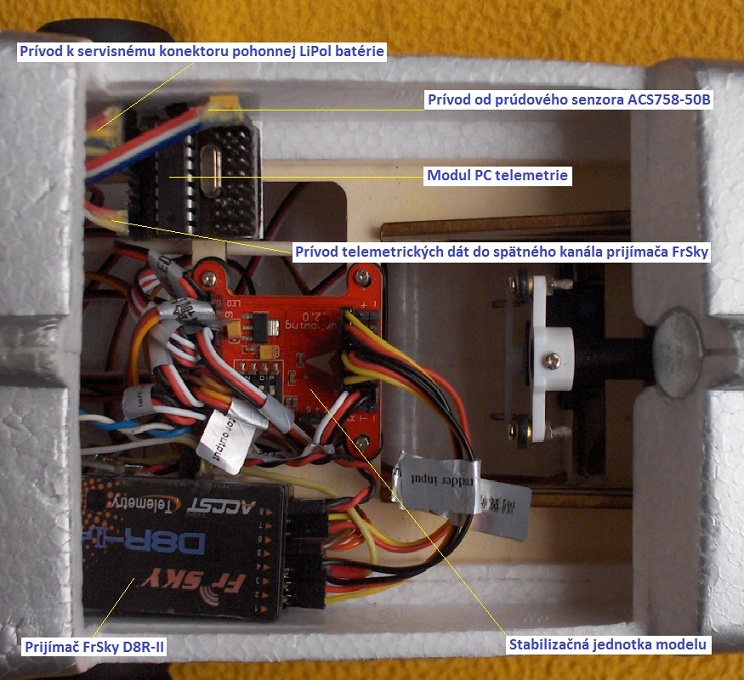
Stabilizačná jednotka (červený modul) bola „polohovaná“ už výrobcom. Bola však uložená krivo a tak opäť nasledovalo trochu vŕtania, brúsenia, lepenia … No a potom už bola stabilizačná jednotka „levelovaná“ správne, presne v duchu významu toho slova.
Zostávalo nájsť optimálnu polohu RC prijímača a telemetrického modulu, to všetko s ohľadom na výrobcom dodanú ale aj na mieru dodatočne vyrobenú, pomerne zložitú kabeláž.
V dnešnej časti sa nakoniec budem venovať problematike uloženia batérie. Hoci výrobca stavebnice priestor pre batériu pripravil, priznám sa, že som úplne nepochopil jeho zámer. I keď som použil batériu, ktorú výrobca odporúča, tá tam akosi „nepasovala“. Ak bola na stojato, tak bola voľná a hlavne, jej silové káble bránili nasadeniu kabíny. Ak by mala byť na ležato, tak „rebrá“ batériového priestoru bránili jej vloženiu.
A tak opäť nasledovalo pár radikálnych rezov a batéria sa ocitla v polohe na ležato:
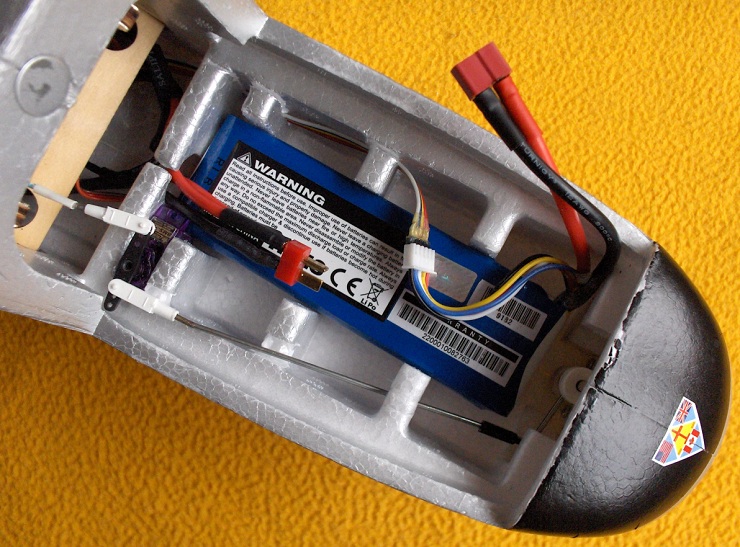
V batériovom priestore je situovaná trochu šikmo, pretože na jednom konci ju obmedzuje servo riadenia smerovky (a predného kolesa) a na druhej strane nesmie brániť voľnému pohybu páke riadenia. Nakoniec sa to podarilo tak, ako je to na obrázku:
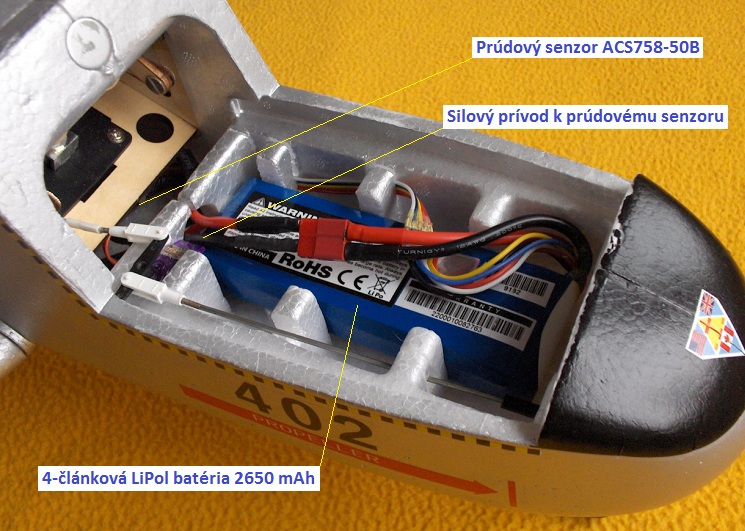
vrátane označenia miesta, kde sa nachádza prúdový senzor.
Kvôli lepšiemu chladeniu (najmä zospodu) je LiPol batéria uložená na dvoch priečne uložených úzkych polystyrénových pásoch (vidno ich na druhej fotografii od začiatku článku), aby neležala priamo na "podlahe" batériového priestoru a vzduch tak mohol okolo LiPolky voľne prúdiť.
<Staršie | tento článok | Novšie>
Napísané: 22. 11. 2015, 10:19 | Prečítané: 9713x | Kategórie: Stavba modelov | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)