Open stabilizer RX3S verzia Ed_10 (2) - Praktický test
Zmena sa týkala režimu Hold, ktorý sme dovtedy považovali pre bežné (rekreačné) lietanie v podstate za nepoužiteľný.
Po Edových úpravách sa správanie režimu Hold (zatiaľ len tak „na stole“, v laboratórnych podmienkach) „umravnilo“.
Ale bude to tak aj v praxi – počas letu?
Včerajšia sobota (7.3.2015) nám na to dala odpoveď.
autor: Janko O. Týždeň uplynul od vtedy, čo sme s radosťou zverejnili upravenú verziu softvéru pre Open stabilizer RX3S, ktorej sme dali meno Ed_10.
Týždeň uplynul od vtedy, čo sme s radosťou zverejnili upravenú verziu softvéru pre Open stabilizer RX3S, ktorej sme dali meno Ed_10.









V komentároch k článku „Open stabilizer RX3S (konečne) s použiteľným režimom Hold (1)“ nám český modelársky kolega Pepa napísal: „Potěšili jste  .
.
Teď by to chtělo článeček o umísťování v éru a létání.“
Naša odpoveď bola síce súhlasná, ale naznačili sme, že počasie je väčší pán ako my. A takéto (veterné) počasie panovalo celý týždeň. Za tú dobu sme N-krát (pričom N je číslo mnohonásobne väčšie ako 1) len tak „nasucho“ overovali funkciu softvéru Ed_10. Naše pocity, ale najmä prístroje (máme na mysli našu gyro-stolicu) dávali prísľub dobrých výsledkov.
A tak keď sa priblížil víkend, povedali sme si: Teraz, alebo nikdy. A keďže slovo „nikdy“ nemáme v obľube, bolo jasné, že to musí byť „teraz“ - teda v sobotu. Počasie bolo krásne – slnečné, ale ako hovorí klasik: Teplo vyzerá inak. Navyše v priebehu dňa vietor silnel. Bolo nám jasné, že skúšať stabilizačný systém (ktorý má eliminovať účinky nárazového vetra na model) za úplného bezvetria, je nezmysel, ale taký silný a taký nárazový ten vietor zase byť nemusel  .
.
Okolo 14.30 som prišiel s EasyStarom NET na Ďatelinu. Cestou som sa úprimne modlil, aby tam nikto (rozumej: žiadny modelár) nebol. V kútiku duše som samozrejme pripúšťal problémy, ba až totálny neúspech a tak som na tú hypotetickú hanbu žiadnych svedkov nepotreboval. Moje modlitby boli vypočuté: (čoby modelár) bol som tam sám. Vietor fúkal južný až juhozápadný, teda perfekt.
Na „kufor“ auta som rozprestrel deku, na ňu som položil vysielač a samozrejme model. Založil som batériu, zapol vysielač, zapol prijímač a teda celú palubnú elektroniku a čakal, pokiaľ sa inicializuje Open stabilizer. Kmitnutie servami oznámilo: hotovo.
Postupoval som podľa overeného postupu: najprv je treba model dostať do výšky bez aktivovanej funkcie testovaného zariadenia. Takže som pred štartom nastavil potenciometer „Master Gain“ do stredu (1500 us), teda Open stabilizer vypnutý. Pred tým som samozrejme ešte niekoľkokrát overil, či všetko funguje, skontroloval správne reakcie kormidiel a tiež či samotný Gyro-efekt má tú správnu orientáciu. Všetko OK a tak som (s vypnutým Open stabilizerom) vyštartoval.
Nebolo to bohviečo, EasyStar bol z toho vetra nepokojný a ja som bol nepokojný z nepokojného EasyStara. Po asi pol minúte „boja s vetrom“ som nastúpal do potrebnej výšky a odhodlal sa odskúšať stabilizáciu. Najskôr (viac-menej pre istotu) režim Rate: model letel ďalej, bol kľudnejší, takže nasledovalo konštatovanie, že tu sa (ako sa dalo predpokladať) nič nezmenilo. Avšak režim Rate nie je sférou nášho záujmu. Tou je režim Hold.
A tak som režim Rate vypol, nadýchol sa a v očakávaní hoci aj toho najhoršieho som zapol režim Hold. Ak by bol niekto vedľa mňa, možno by po chvíli povedal: Veď sa NIČ nedeje. Ja som však bol z toho NIČ celý šťastný. To NIČ pre mňa znamenalo, že „strašná necnosť“ neexistuje, model prechádza z režimu „plnej stabilizácie“ (kniple v neutráli) do „riadeného režimu“ (pilot začína na kniple pôsobiť) úplne hladko a nedochádza k nepríjemnému trhnutiu, ako to (bohužiaľ) robí nami obdivovaná FY-30A.
Keď k tomu pridáme nastaviteľné dynamické riadenie Gyro-efektu, diaľkovo nastaviteľnú mieru stabilizácie (Master Gain) a ďalšie (v predchádzajúcich článkoch spomínané) vylepšenia od JohnaRB, dostaneme stabilizačný systém, ktorý dovoľuje príjemné (pohodové) riadenie modelu, len tak pre radosť, ale ak chcete, tak aj plnú akrobaciu.
Tu sa musím trochu pristaviť: ešte doma som si programovacím prípravkom (dLUX) nastavil niektoré parametre Open stabilizera, tak povediac „k obrazu svojmu“:
-
MIXER_EPA MODE som si nastavil na MAX (900 až 2100 us)
-
STICK_GAIN THROW som si nastavil na HALF
-
a MAX STICK_ROTATE som si nastavil na najmenšiu možnú hodnotu: VERY_LOW
Počas poletovania som tak trochu oľutoval nastavenie STICK_GAIN THROW na hodnotu HALF. EasyStar tak bol na môj vkus trochu viac citlivý na riadenie pilota. Toto nastavenie je vhodné skôr pre tých, ktorí uprednostňujú nadvládu pilota nad mierou stabilizácie.
Ja mám radšej pohodovejšie, menej razantné riadenie modelu a tak si asi nabudúce nastavím STICK_GAIN THROW na hodnotu FULL. Vtedy, ak si nastavím polovičné výchylky, tak aj v krajných polohách kniplov je model stále mierne stabilizovaný. Samozrejme toto nastavenie obmedzuje obratnosť modelu, model má akoby menšie výchylky kormidiel, ale je stabilnejší.
Ak by som v tejto prvej časti článku mal zhrnúť výsledky praktického testu Open stabilizera verzie Ed_10, tak musím doplniť, že počas troch vyše 20-minútových letov som sa snažil vyskúšať všetky vlastnosti režimu Hold.
Po vylietaní prvej batérie som ťažisko posunul mierne dopredu, dotrimoval krídelká, výškovku aj smerovku. Druhý štart som (síce s malou dušičkou) absolvoval už so zapnutým režimom Hold. Výsledok: Balada. Model odštartoval evidentne kľudnejšie ako prvýkrát, následkom čoho som po zvyšok lietania bol aj ja evidentne kľudnejší. Samozrejme stabilizácia (režim Hold) bola zapnutá po celý čas letu, vrátane štartu, až po dosadnutie modelu do trávy.
Tretí štart (tretia batéria) to už bola takmer rutina: nastavenie modelu do správnej štartovacej pozície (krídla vodorovne, predok asi 15 stupňov hore), „zamknutie“ polohy (zapnutie režimu Hold, alebo „pokvedlanie“ kniplami), plyn naplno, hodiť model … Po odhodení modelu by som si kľudne mohol strčiť ruky na nejaký čas do vrecka.
Ešte jedna poznámka k rozdielu medzi stabilizáciou Derivačnou (režim Rate - klasické gyrovanie) a stabilizáciou Proporcionálnou (režim Hold - udržanie „postoja“ modelu). Na prvý pohľad by sa mohlo zdať, že model stabilizovaný Proporcionálne sebou vo vetre viacej „mece“ ako model stabilizovaný Derivačne. Áno, nie je to zdanie, je to fakt:
-
pri Derivačnej stabilizácii - pri klasickom gyrovaní (režim Rate) pri poryve vetra model urobí len jeden pohyb: naklonenie modelu vplyvom poryvu vetra. To je síce zmiernené stabilizáciou, ale to naklonenie - ten pohyb tam musí byť, inak gyrá nič nazaregistrujú a teda nemôžu ani nič zmierňovať. Pilot má potom dve možnosti: buď model vráti do pôvodnej polohy „ručne“, alebo ho nechá naklonený. Potom je však možné konštatovať, že model je v takej pozícii ako chce vietor a nie ako chce pilot.
-
Pri Proporcionálnej stabilizácii (režim Hold) pri poryve vetra model urobí dva pohyby: jeden - naklonenie modelu vplyvom poryvu vetra. To je zmiernené zložkou D (derivative), ktorú režim Hold tiež obsahuje. Ale následne je model vrátený do svojej (takmer) pôvodnej polohy (druhý pohyb) vplyvom zložky P (proportional), ktorá je zodpovedná za činnosť Attitude Hold (udržanie polohy – postoja). Tu je možné konštatovať, že model je v takej pozícii ako chce pilot a nie ako chce vietor.
Keby sme mali porovnať Ed_Open stabilizer a náš AssOrx, tak najprv treba povedať, že pôvodný softvér od JohnaRB bol Edom zmenený tak, aby sa vlastnosti Ed_Open stabilizera čo najviac podobali na AssOrx. Cez to všetko tu určité rozdiely sú:
-
AssOrx (najmä verzia 5-3-5) je vhodný skôr do väčších modelov, ktorých väčšie rozmery a hmotnosť dávajú väčšie zotrvačnosti, ktoré „zakryjú“ väčšiu latenciu (oneskorenie medzi vstupnými veličinami a výstupným signálom) AssOrxu. Zase má možnosť samostatne ovládať a stabilizovať predné riadené koleso podvozku modelu, o čom Open stabilizer môže zatiaľ len snívať.
-
Ed_Open stabilizer je vhodný aj do malých a stredných modelov, pretože jeho latencia je menšia ako u AssOrxu. Ide o to, že AssOrx zmeria vstupné signály, potom výstupné (už trochu oneskorené) signály z Orange RX3S, urobí potrebné výpočty a až potom vygeneruje svoje vlastné výstupné signály (do serv modelu). Open stabilizer má latenciu kratšiu minimálne o oneskorenie Orange RX3S. Preto je jeho tendencia k rozkmitaniu stabilizovaného modelu citeľne nižšia aj pri vyššie nastavenej miere stabilizácie (Master Gain).
Na základe uvedeného sme s Miroslavom prijali nasledujúce riešenie:
-
Všetky naše AssOrxy (celkom 10) buď už sú alebo budú upravené na verziu 5-3-5 a budú (spoločne) použité do našich väčších modelov (Miroslavov Twin Otter, môj Oscar a pod.) alebo modelov so samostatne riaditeľným predným kolesom (Miroslavov a môj SkyMule a pod.).
-
Všetky naše malé a stredné modely a modely nevyžadujúce samostatne riaditeľné predné koleso (čiže väčšina našich modelov) budú stabilizované Ed_Open stabilizerom.
V druhej časti tohto článku (opäť) vyhovieme Pepovi a naznačíme, ako správne umiestniť akýkoľvek stabilizačný systém (teda nie len Open stabilizer) v modeli.
Pravidlo je jednoduché: stabilizačný systém by mal byť (pokiaľ sa to aspoň trošku dá) v ťažisku modelu. Často krát (väčšinou) sa to nedá a tak je dobré stabilizátor letu umiestniť aspoň čo najbližšie k ťažisku. My umiestňujeme stabilizátory takmer vždy „naplocho“, hoci Open stabilizer umožňuje nastaviť aj inú polohu. Taktiež sa snažíme, aby bol možný prístup k nastavovacím prvkom – trimrom. Stabilizátory upevňujeme pomocou suchých zipsov, ktoré súčasne dobre plnia úlohu tlmiča vibrácií.
Ja mám letové stabilizátory, či už Ed_Open stabilizery alebo AssOrxy, vo všetkých (9) svojich modeloch. Ako je stabilizátor umiestnený v niektorých z nich, ukazujú fotografie:
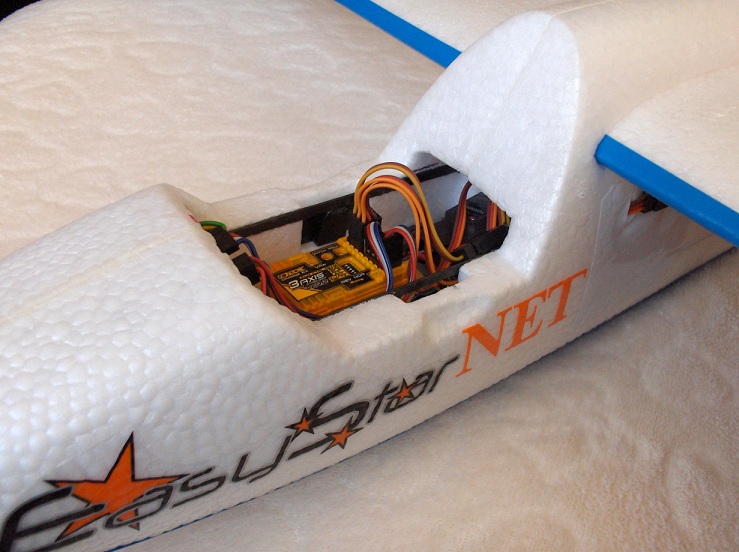
Ed_Open stabilizer v EasyStarovi NET. Toto nie je optimálne umiestnenie (je ďaleko od ťažiska), ale iná možnosť by bola plná problémov.

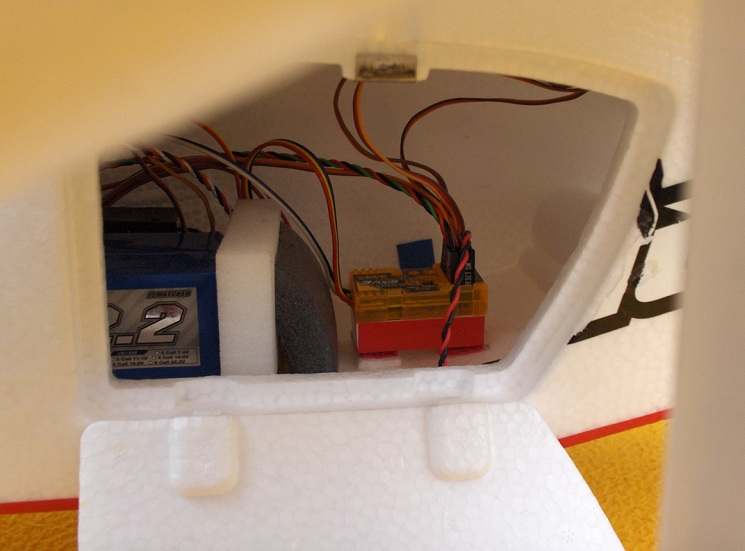
Stabilizačný systém v modeli s Delta krídlom Fantom 3Phase. Dobrý prístup k nastavovacím prvkom.

Stabilizačný systém v inom modeli s Delta krídlom - v modeli Black Sabbath (pôvodne JAS-39 Grippen). Opäť dobrý prístup k nastavovacím prvkom.
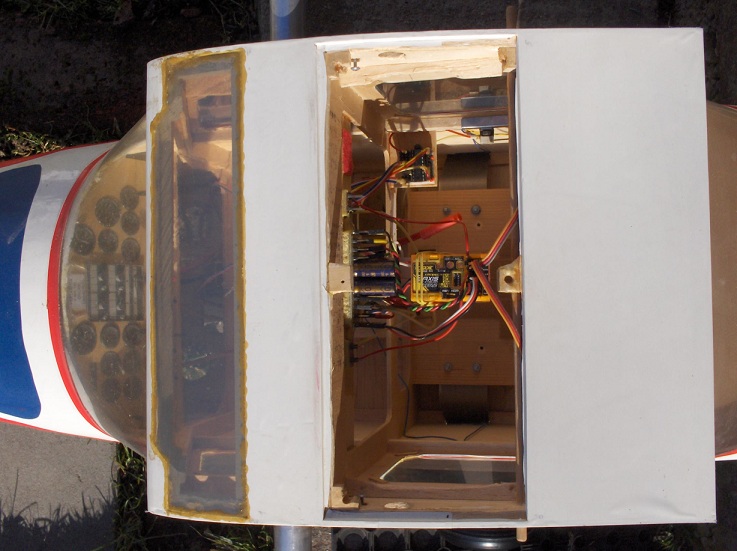
Takmer ideálne umiestnenie stabilizačného systému vo veľkom modeli - P-66 Partenavia Oscar. Je skoro v ťažisku, dobrý prístup k nastavovacím prvkom.
Umiestnenie stabilizačného systému v modeli SkyMule. Blízko ťažiska, prístup k nastavovacím prvkom je trochu horší.
<Staršie | tento článok | Novšie>
Napísané: 8. 3. 2015, 12:47 | Prečítané: 9176x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 15
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Veličina MAX STICK_ROTATE v aktuálnej verzii č.10 nemá žiaden vplyv na nastavenie stabilizéra. Preto ju s kľudom môžete nechať na prednastavenej hodnote (do výpočtov nijako nezasahuje).
STICK GAIN THROW:
Verzia č.10 má viacstupňové ovládanie vypínania režimu HOLD. K dispozícií sú tieto kombinácie:
STICK GAIN THROW - FULL -> vypínanie režimu HOLD je od polohy knipla 0% (stred) plynule do 99,9% výchylky knipla.
STICK GAIN THROW - HALF -> vypínanie režimu HOLD je od polohy knipla 0% (stred) plynule do 49,9% výchylky knipla. Od 50% výchylky knipla je režim HOLD vypnutý.
STICK GAIN THROW QUARTER -> vypínanie režimu HOLD je od 0% plynule do 24,9% polohy knipla. Od 25% výchylky knipla je režim HOLD vypnutý.
Ako Janko O. napísal, jemu viac vyhovuje FULL dynamika. Pôvodne som chcel spraviť iba jeden rozsah dynamiky vypínania režimu HOLD, no nakoniec som si uvedomil, že ak to dám na tieto tri (voliteľné) rozsahy, tak viac stupňová dynamika by v konečnom dôsledku mohla osloviť aj (skeptickejšiu) skupinu modelárov, ktorí majú výhrady voči zasahovaniu činnosti stabilizácie do kniplovania + lepšie pokryje viaceré štýly lietania.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Ja ich rad pouzivam, je to fajn vec. S pozdravom EO
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Ak sa však pozrieš na odkaz , tak z obrázkov je vidieť, že príjímač je umiestnený na osobitnej doske nad stabilizérom, čo značí, že príjímač ma osobitné riadenie (nezávislý procesor) a pod ním je doska stabilizéra s vlastným procesorom. Preto by mala fungovať verzia č.10 aj pre Orange príjimač. Na testovanie použi RX3SM.hex
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Postup funguje, no je pravda, že na správnu funkciu RX3S je potrebné použiť nezávislý vstup na ovládanie činnosti stabilizátora. A toto bude asi problém, ako to aj spomínali chlapi v komentároch.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Channel 6 is hardwired into the AUX control in the RX3S. The switch on your TX that controls channel 6 (normally Flaps) is used for On/Off control.
Takže korektne by to malo fungovať aj na RX3S DSM2.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
dakujem za info a za ochotu a hlavne ze vas tymto trapim
medzi modelarmi je tento RX3S s DSM2 velmi rozsireny
myslim ze viac ako samostatny RX3S
dovod je jeho jednoduche pouzitie a montaz,
no mnohym to lezi doma v supliku lebo si to nevedia poriadne nastavit .) pripadne takmer rozbili lietadlo
ja som kupil uz tri kusy na inzerat od najitelov ktory boli s nim nespokojny, mne funguju spravne .)
myslis vstup Aux cez kotry sa prepina Rate a Hold ?
(to je ten nezavisly vstup na ovladanie cinnosti?)
idem si to precitat
mam aj D-lux tak tym by som si to vedel prepinat?
pozeral som ze upravuju RX3S_V3 s DSM prepojkami
https://docs.google.com/document/d/1mDjC1NHaGSoKw8bjJ9FkFgby2rr6544d-yykV3Xz6dg/pub
prva prepojka je podpora dvoch servo kridielok
druha prepojka: (to bude asi to co potrebujem)
The first modification is to move the Mode/Gain control from channel 6 to channel 5. You must also modify your transmitter setup to use channel 5 for you Mode/Gain control.
tretia prepojka, mam v preklade chaos .)
chelo by to urobit poriadny preklad a popisat postup
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Remote On/Off and Master Gain Control using the AUX1 channel. AUX1 channel controls master gain linearly from 0% to 100%. AUX1 channel also controls RATE and HOLD modes
Ďalej, ak chceš používať dual ailerons:
Supporting Dual Ailerons with the RX3S V3 requires a hardware modification. If your transmitter has the ability to map the second aileron channel to channel 5 only 1 modification is required. The first modification is to move the Mode/Gain control from channel 6 to channel 5. You must also modify your transmitter setup to use channel 5 for you Mode/Gain control.
V tomto prípade modifikácia znamená:
This involves the addition of 1 wire to the bottom of the PCB to connect the JP4 TX pin to the GEAR pad
A je tam ešte poznámka, že:
If your transmitter forces the second aileron control to be on channel 6, then 2 modifications are required.
to znamená, že potrebuješ urobiť úpravy dve:
The first modification is to move the Mode/Gain control from channel 6 to channel 5. You must also modify your transmitter setup to use channel 5 for you Mode/Gain control.
Úprava č.1 v tomto prípade je: This change requires the removal of R24.
Úprava č.2 je: replace R24 with a discrete 10K resistor
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
to je povodna funkcia ktoru aj teraz pouzivam
mikroprepinacom si prepnem na ovladanie on-off gyra vysielacom
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)