Orange Flight Stabilizer (RX3S) s Open Source – 9. časť
A aby to naše pozorovanie nebolo len „pocitové“, ale aby sa dalo bližšie charakterizovať a dokonca kvantifikovať, posadili sme Open stabilizer na stolicu.
Máme na mysli testovaciu stolicu a nie stolicu čoby viac-menej lekársky či zdravotnícky výraz.
autor: Janko O.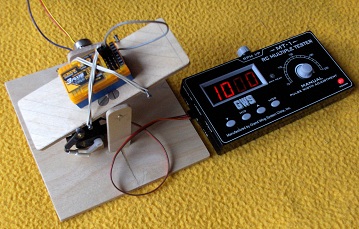 V dnešnej časti seriálu sa pozrieme na správanie sa Open stabilizera RX3S v móde RATE aj v móde HOLD.
V dnešnej časti seriálu sa pozrieme na správanie sa Open stabilizera RX3S v móde RATE aj v móde HOLD.









Testovaciu stolicu na zisťovanie vlastností gýr a „gyrovo založených“ stabilizačných systémov sme vám ukázali takmer presne pred dvomi rokmi (9.1.2013) v článku „Zisťovanie vlastností gýr – 1. časť“.
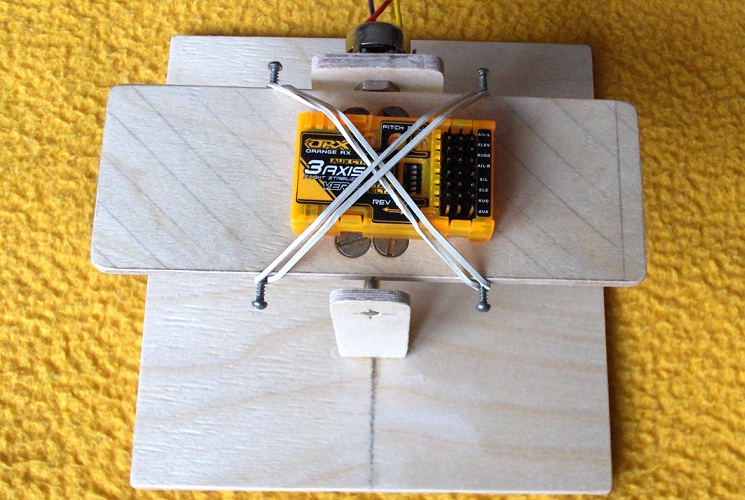
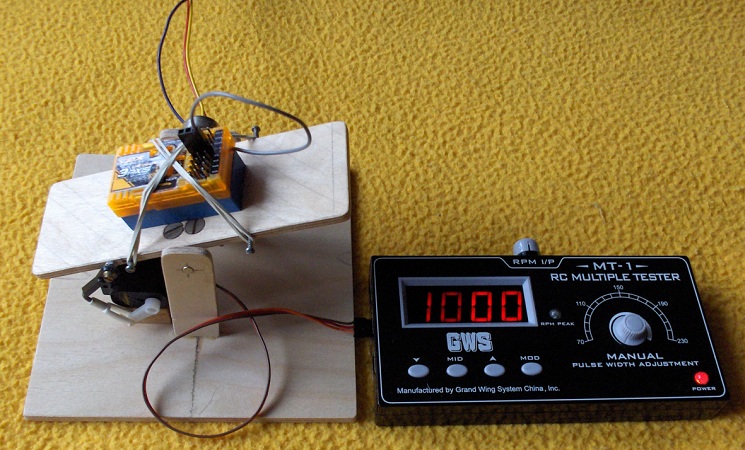
Medzitým sme ju však trochu zdokonalili - zmechanizovali - zautomatizovali:
Výrazom „gyrovo založených“ máme na mysli to, že táto stolica môže merať len vlastnosti senzorov - zariadení citlivých na rotačné zrýchlenie. Nedokáže merať vlastnosti akcelerometrov, teda zariadení citlivých na lineárne (dopredné) zrýchlenie.
Pripomeňme si charakteristiku gyra:
Senzory gýr tohoto typu reagujú len na tzv. rotačné zrýchlenie alebo matematicky povedané na deriváciu rotačného pohybu. Čiže nereagujú na akýkoľvek priamočiary pohyb, či už ustálený alebo na zrýchlovaný alebo spomalovaný. Rovnako nereagujú na ustálený rotačný pohyb.
Ako funguje stolica a ako sa na ňu Open stabilizer upevňuje je vysvetlené v spomínanom článku.
Open stabilizer RX3S môže pracovať v dvoch základných (let stabilizujúcich) režimoch:
-
Rate
-
Hold
V manuáli je k tomu tabuľka, z ktorej sme „vytiahli“ záujmovú pasáž:
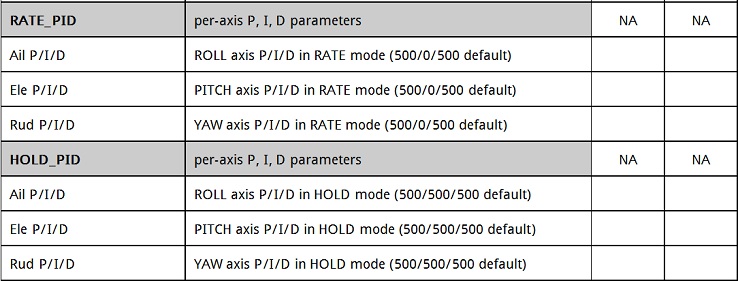
Možno by bolo dobré pozastaviť sa nad významom písmen P, I a D. Ich význam zo základov automatizačnej (skôr regulačnej) techniky je nasledovný:
-
P – Proportional (proporcionálny – úmerný)
-
I – Integral (integračný – veľmi zjednodušene „sumárny“)
-
D – Derivative (derivačný – veľmi zjednodušene „úmerný zmene“)
To, čo autori manuálu označujú ako reguláciu PID, by sme my označili skôr ako reguláciu PDD2. Konkrétne: P → D, I → P a D → D2. Vedie nás k tomu samotná charakteristika gyra z úvodu tohto článku: Senzory gýr tohoto typu reagujú len na tzv. rotačné zrýchlenie alebo matematicky povedané na deriváciu rotačného pohybu. Ak teda gyro, alebo letový stabilizátor prepnutý do režimu Rate, upevníme na stolicu a tú nakloníme doľava a potom doprava, dostaneme zo snímacieho potenciometra stolice modrý priebeh a jeho deriváciou v derivačnom obvode žltý priebeh:
Ak na výstup Open stabilizera (v režime Rate nastaveného na PID = 500, 0, 0, podľa nás je ale PID = 0, 0, 500) pripojíme špeciálny prípravok – akýsi prevodník, ktorý umožňuje sledovať (a zaznamenávať) veľkosť výchyliek serva na digitálnom (pamäťovom) osciloskope, dostaneme toto:
Ak máte pocit „deja vu“, tak to je dobre, lebo naozaj vidíte deriváciu rotačného pohybu letového stabilizátora.
Ak pomocou programovacieho prípravku Open stabilizer v režime Rate nastavíme na PID = 0, 0, 1000 (čiže: žiadne P, žiadne I, len D nastavené na maximum), dostaneme toto:
Podľa nás to je derivácia žltého priebehu z predchádzajúceho obrázku, ktorý však je deriváciou modrého priebehu. Takže vlastne vidíme druhú deriváciu rotačného pohybu letového stabilizátora.
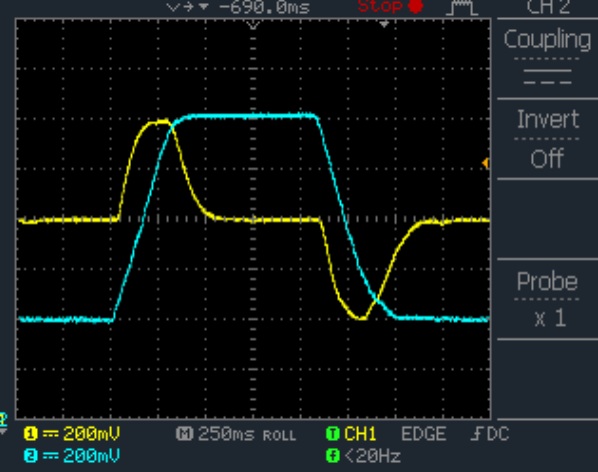
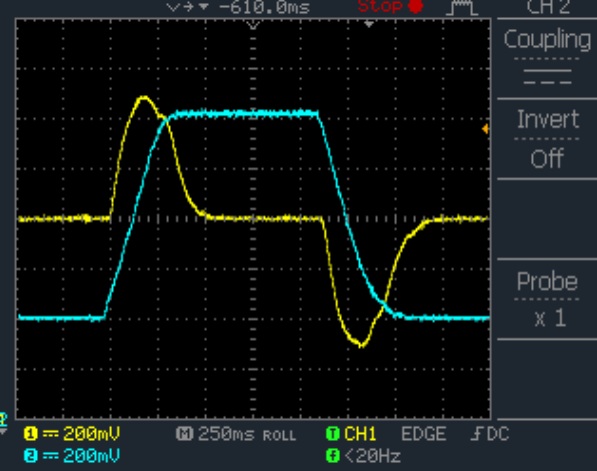
Ak Open stabilizer v režime Rate nastavíme na PID = 500, 0, 1000, dostaneme toto:
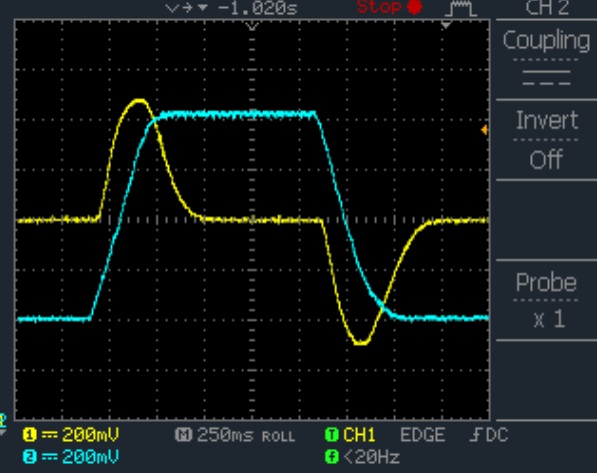
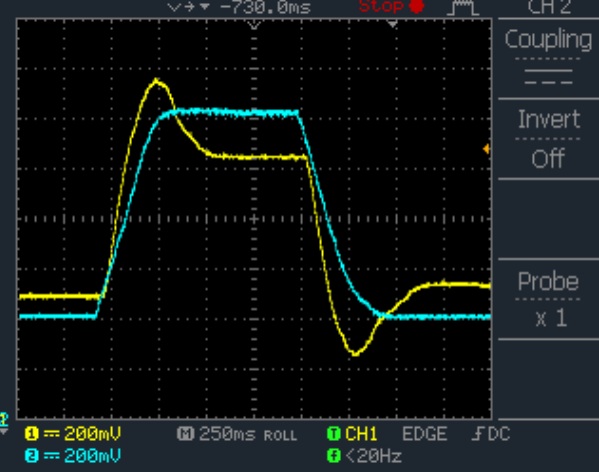
Ak Open stabilizer v režime Rate nastavíme na PID = 500, 0, 500 (čo je vlastne štandardné nastavenie režimu Rate), dostaneme toto:
V podstate vidíme druhou deriváciou zdeformovanú (prvú) deriváciu rotačného pohybu letového stabilizátoru.
K čomu to je dobré?
Nuž, ťažko povedať. Väčšina gýr a letových stabilizátorov, ktoré nám prešli rukami, si „vystačila“ s (prvou) deriváciou a druhú deriváciu nepotrebovali. Ak však začneme teoretizovať, tak by to mohlo zvyšovať rýchlosť prebehu signálu a v spojení s extrémne rýchlymi servami zlepšovať stabilizáciu letu modelu.
Ak Open stabilizer prepneme do režimu Hold, je jeho správanie trochu iné. Vtedy by mal (akýkoľvek) stabilizačný systém nežiadúce vplyvy (napr. poryvy vetra) nie len zmierniť (rovnako ako v režime Rate), ale dokonca eliminovať. Čiže: po naklonení modelu vplyvom poryvu vetra (ktoré bolo zmiernené Derivačnou zložkou) sa model vráti do pôvodnej polohy (pôsobením Proporcionálnej zložky).
Takto funguje nami uznávaný letový stabilizátor FY-30A a tak funguje aj náš AssOrx:
(Žiadúce) „prekmitnutie“ žltého priebehu má „na svedomí“ Derivačná zložka signálu (zmierni náklon modelu vplyvom poryvu vetra). Potom nasleduje Proporcionálna (úmerná) zložka signálu, ktorá je naozaj úmerná nakloneniu modelu (modrému priebehu). Tá „existuje“, pokiaľ „existuje“ náklon modelu. Ak sa náklon modelu zníži, klesne (zníži sa) aj P-zložka. Ak sa model vráti do pôvodnej polohy (náklon modelu je nulový), P-zložka zanikne, je nulová.
Ako v režime Hold reaguje Open stabilizer?
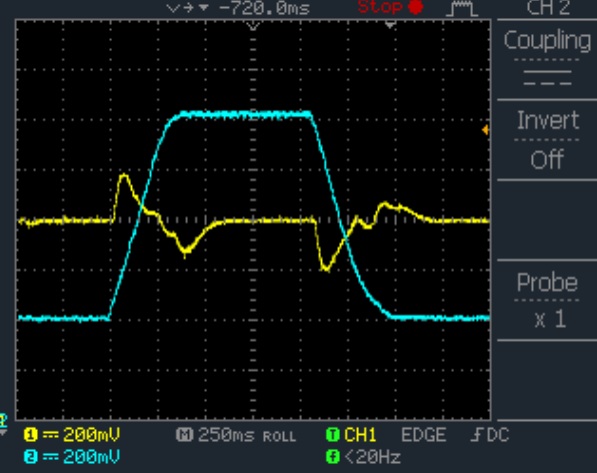
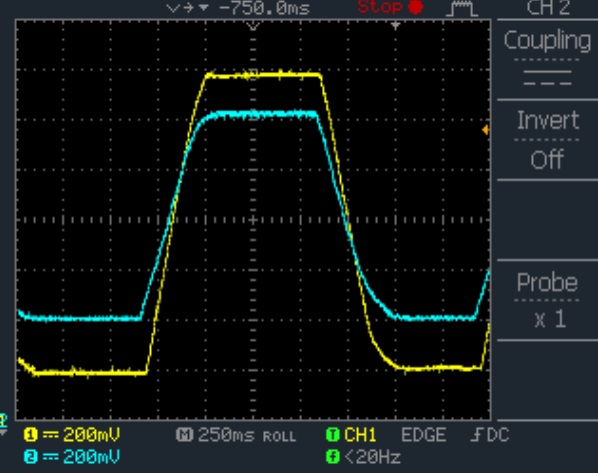
Ak necháme pôvodné nastavenie PID = 500, 500, 500, dostaneme toto:
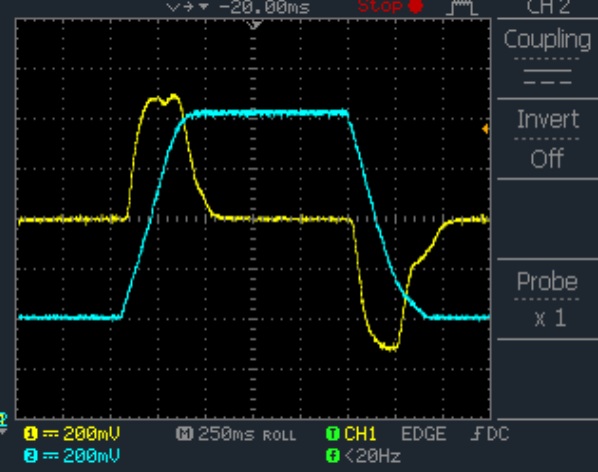
Ak však nastavíme PID = 500, 150, 500 (alebo 500, 150, 0), dostaneme toto:
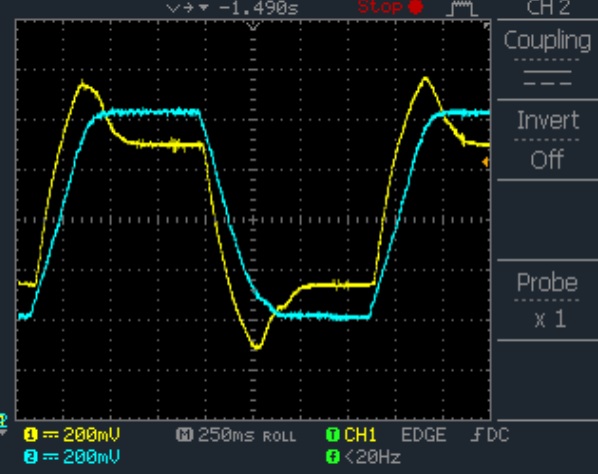
Hoci sme manipulovali (údajne) I-zložkou, zmeny sa prejavili na P-zložke. To je tiež dôkazom nášho úvodného tvrdenia, že to, čo autori manuálu označujú ako reguláciu PID, by sme my označili skôr ako reguláciu PDD2. Konkrétne: P → D, I → P a D → D2.
Tento priebeh sa podobá alebo je totožný s tým, čo „ponúka“ uznávaný FY-30A a náš AssOrx. Cez to všetko je z nášho pohľadu režim Hold v Open stabilizeri RX3S nepoužiteľný. Je to z dôvodu, ktorý sme v predminulej časti nášho seriálu (v druhej časti článku) nazvali „strašná necnosť“.
<Staršie | tento článok | Novšie>
Napísané: 25. 1. 2015, 12:01 | Prečítané: 9979x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 4
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Janko povedal by som, že v návode to autori dobre majú.
Aby to bolo menej zmätočné, bolo by vhodnejšie porovnávať nie náklon/výstup PID, ale vstup/výstup PID.
PID regulátor nemôže za to, že (v tvojom prípade) na vstup privádzaš signál z gyra (ktorý má priebeh derivácie).
Na obrázku č.2 PID = 500, 0, 0 je skutočne P zložka s hodnotou 500. Konštanta (ako je to viditeľne) je mierne prekompenzovaná, čo v prípade PID je žiadúce. Na obrázku č.3 PID = 0, 0, 1000 je prvá derivácia zo vstupného signálu.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Regulačná sľučka (regulačný obvod) má za úlohu udržiavať výstupnú veličinu na nejakej (nastavenej) úrovni. Napr. regulátor otáčok má za úlohu stabilizovať otáčky.
Vo vnútri sľučky vznikne regulačná odchylka (e), ktorá je rozdielom požadovanej (riadiacej) veličiny (w) a výstupnej veličiny (x).
Ďalej regulačný obvod "manipuluje" práve s regulačnou odchýlkou (zosilní ju v P, spracuje v D, či I) a výsledok spracovania potom privedie do akčného člena.
V našom prípade (v prípade letového stabilizátora) je našou snahou stabilizovať polohu modelu.
Regulačnou odchylkou (e) je rozdiel medzi pôvodnou polohou modelu a polohou po poryve vetra. D-zložkou je derivácia odchylky polohy, nie derivácia derivácie (druhá derivácia) odchylky polohy modelu.
Takto to vidím ja.
Ale inak viem, čo máš na mysli.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Predmetom článku však bola prezentácia nameraných hodnôt (na neuzatvorenej regulačnej sústave) a popri tom boli vyslovené otázky. Na zodpovedanie týchto otázok (aspoň mne) pomohlo domyslieť a (virtuálne) vložiť do jednotlivých obrázkov (chýbajúce) vstupné priebehy pre PID (a preto som pridal komentár k článku

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
- vstupný člen tam je (gyro) - je súčasťou RX3S.
- výstupný akčný člen (servo) je prezentovaný tým prevodníkom, ktorý mení šírku impulzov na analógovú hodnotu. To je to isté, ako keby som na hriadeľku serva napojil hriadeľku potenciometra. A na osciloskope zobrazoval jeho výstupné napätie.
Ako užívateľa ma zaujíma, ako sa to správa ako celok. A ako celok sa to nespráva ako regulátor PID.
V skutočnosti tam žiadna zložka I nie je. Tá má odstraňovať regulačnú odchylku (tú som už spomínal minule a trvám na svojom, čo v prípade letových stabilizátorov považujem za regulačnú odchylku), ale ju neodstraňuje.
V neuzatvorenej regulačnej sústave pri vzniku regulačnej odchylky (naklonení modelu), vplyvom jej integrácie musí akčný člen (servo) "vycestovať" až na doraz. No "nevycestuje", ale v podstate len prezentuje mieru (úmernosť, proporciu) naklonenia modelu, čiže P-zložku.
Preto som napísal, že P → D, I → P a D → D2, čiže deklarované P je v skutočnosti D, deklarované I je v skutočnosti P (viď predchádzajúci odstavec) a deklarované D je v skutočnosti D na druhú.
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)