Orange Flight Stabilizer (RX3S) s Open Source – 7. časť
V minulej časti seriálu sme si (okrem iného) vysvetlili význam a spôsob nastavenia niektorých dôležitých parametrov Open Stabilizera.
Dnes sa zoznámime s ďalšími parametrami a vysvetlíme ich praktický zmysel.
autor: Janko O. Už sú dostupné novšie verzie firmvéru (zo 16.12.2014) a tiež novšia verzia manuálu.
Už sú dostupné novšie verzie firmvéru (zo 16.12.2014) a tiež novšia verzia manuálu.









Asi od polovice decembra 2014 sú k dispozícii (momentálne) najnovšie verzie zdrojových kódov, ale aj HEX-súborov (v adresári Builds) pre stabilizátory, ale aj pre „nastavovacie prípravky“.
Taktiež je k dispozícii najnovšia verzia „manuálu“ (z 19.12.2014).
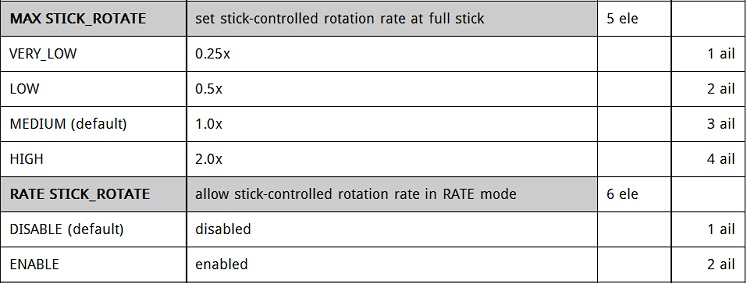
Dnes sa bližšie pozrieme na jeden pomerne zvláštny parameter, ktorý ma ťažko pochopiteľné meno: Max Stick Rotate.
V režime Hold je tento parameter implicitne (default) aktivovaný a nie je možné ho deaktivovať, dá sa len redukovať (2x, 1x, 0.5x, 0.25x) .

V režime Rate je implicitne vypnutý (deaktivovaný - Disabled)

a je možné ho aj zapnúť (Enabled), viď tabuľka:
Pochopiť funkciu tohto parametra, to bol naozaj tvrdý oriešok  . A pochopiť, na čo je to pri riadení modelu (niekomu) dobré, to je pre nás oriešok doteraz
. A pochopiť, na čo je to pri riadení modelu (niekomu) dobré, to je pre nás oriešok doteraz  . Nebudeme vás napínať, rovno vám povieme, že so stabilizáciou letu to nemá nič spoločné. Je to akýsi „posilovač riadenia“, či „zväčšovač (malých) výchyliek“.
. Nebudeme vás napínať, rovno vám povieme, že so stabilizáciou letu to nemá nič spoločné. Je to akýsi „posilovač riadenia“, či „zväčšovač (malých) výchyliek“.
Najprv sme jeho funkciu sledovali na pohybe serv (čo bolo náročné a nenázorné), ale potom sme zrealizovali špeciálny prípravok – akýsi (dvojkanálový) prevodník, ktorý umožňuje sledovať (a zaznamenávať) veľkosť výchyliek serva na digitálnom (pamäťovom) osciloskope. Poďte sa na to pozrieť s nami:
Je treba si uvedomiť, že mieru účinnosti parametra Max Stick Rotate je možné riadiť „master gain“ potenciometrom. Keď efekt nastavíme na nulu (približne v strede potenciometra) a kniplom vysielača niekoľkokrát mierne „pokvedláme“ doľava a doprava, tak nám (dvojkanálový) osciloskop ukáže toto:

Žltý priebeh (takmer ho nevidno, lebo je prekrytý modrým priebehom) zobrazuje, aké by boli výchylky serva, keby bolo pripojené ešte PRED Open Stabilizerom. Modrý priebeh zobrazuje pohyby serva, keby bolo pripojené ZA Open Stabilizerom. Keďže potenciometrom „Master gain“ bola činnosť Open Stabilizera eliminovaná, tak priebeh za stabilizerom je rovnaký, ako pred stabilizerom.
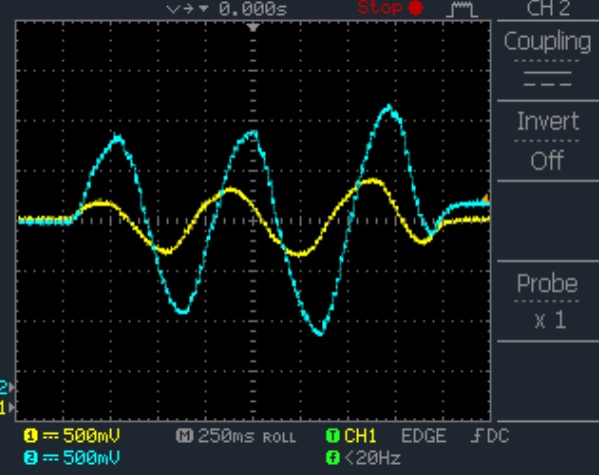
Ak „Master gain“ nastavíme na maximum do režimu Rate a kniplom vysielača niekoľkokrát mierne „pokvedláme“ doľava a doprava, dostaneme toto:
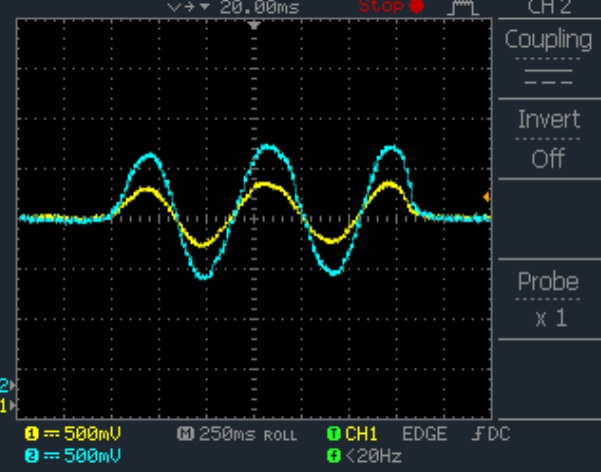
Jediné, čo vidíme je, že servo za stabilizerom (modrý priebeh) by malo väčšie výchylky ako bez stabilizera (žltý priebeh). Čiže stabilizer zväčšil (malé) výchylky približne 2x.
Ak kniplom vysielača niekoľkokrát silnejšie „pokvedláme“ doľava a doprava, dostaneme toto:
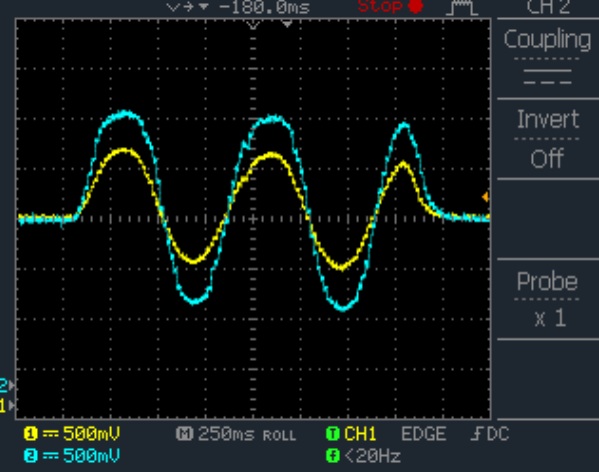
Výchylky pred aj za stabilizerom sú väčšie, ale tie ZA (modrý priebeh) už nie sú 2x väčšie ako tie PRED (žltý priebeh).
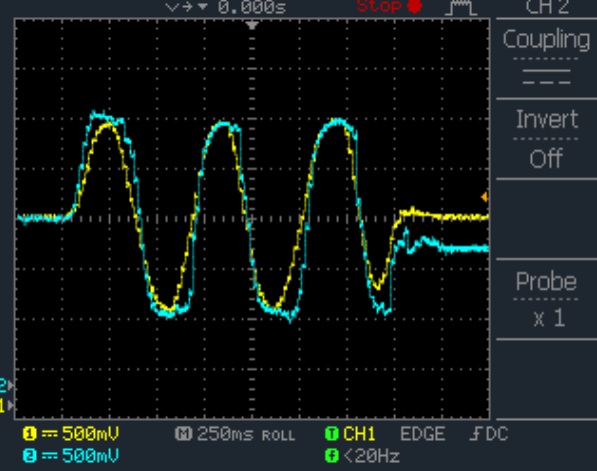
Ak kniplom vysielača niekoľkokrát „pokvedláme“ doľava a doprava skoro nadoraz, dostaneme toto:
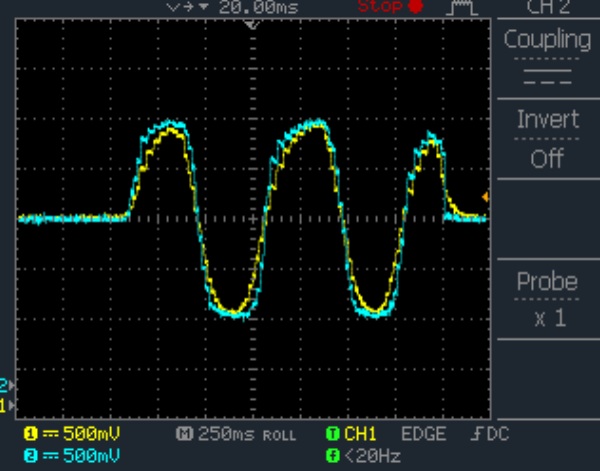
Výchylky ZA už skoro ani nie sú väčšie, ako výchylky PRED stabilizerom, čiže stabilizer veľké výchylky nezosilňuje, tie však majú strmší nábeh (rýchlosť prebehu - angl. Slew Rate).
Sami seba sa pýtame, na čo je to dobré? Autori tvrdia, že to zvyšuje rýchlosť reakcií modelu na zásahy pilota do riadenia.
Ak „Master gain“ nastavíme na maximum do režimu Hold, je situácia ešte nepochopiteľnejšia.
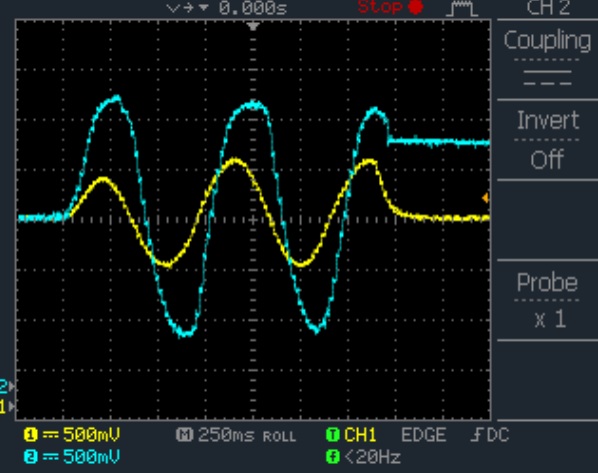
Ak kniplom vysielača niekoľkokrát mierne „pokvedláme“ doľava a doprava, dostaneme toto:
Výchylky za stabilizerom sú nie len že (opäť) väčšie, ale voči vstupným sú aj fázovo posunuté (to je dôkazom nášho tvrdenia, že v režime Hold niekde v programe dochádza k integrácii nie len „gyro-efektu“ (čo je v poriadku), ale aj k integrácii výchyliek knipla (čoho zmysel však nechápeme). Integráciou približne sínusového priebehu dostaneme fázovo posunutý (oneskorený) sínusový priebeh). Ako to má zlepšiť riadenie modelu, je nám záhadou.
Ak kniplom vysielača niekoľkokrát silnejšie „pokvedláme“ doľava a doprava, dostaneme toto:
Situácia je analogická, no navyše sa prejavila ďalšia „strašná“ necnosť režimu Hold: aj po vrátení knipla do neutrálu (v pravej časti obrázku: žltý priebeh je horizontálne v strede obrazovky), servo by zostalo „visieť“ takmer v krajnej polohe (modrý priebeh sa nevrátil do horizontálneho stredu obrazovky).
Ak kniplom vysielača niekoľkokrát „pokvedláme“ doľava a doprava skoro nadoraz, dostaneme toto:
Situácia podobná ako v režime Rate (dokonca aj fázový posun je len minimálny), len „strašná necnosť“ sa tentoraz prejavila na druhej strane.
Aby sme „strašnú necnosť“ odhalili v plnej „nahote“, realizovali sme ďalšie meranie.
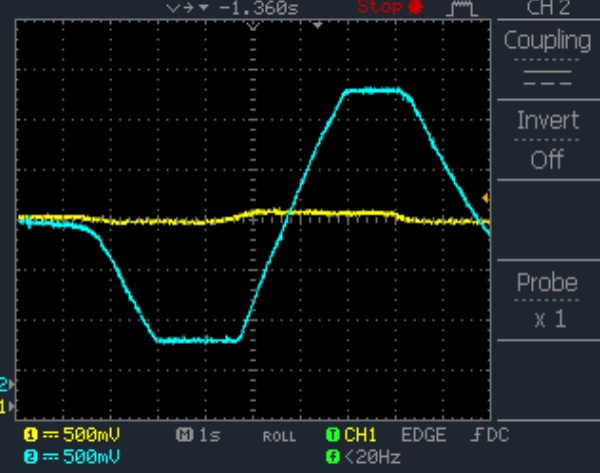
Osciloskop sme prepli na pomalší beh (prebeh lúča od ľava do prava za 10 sekúnd) a knipel sme veľmi jemnúčko (jednotky mm) vychýlili (a asi 2 sekundy podržali) raz na jednu a potom na druhú stranu (na žltom priebehu skoro ani nevidno, že by opustil stredovú horizontálnu čiaru). Pomyselné výstupné servo by (bez toho, že by sa kniplom ďalej hýbalo) postupne „vycestovalo“ na jeden doraz a potom (po zmene výchylky knipla) na druhý doraz.
Niekedy dokonca ani netreba kniplom pohnúť: osciloskop sme prepli na ešte pomalší beh (od ľava do prava za 50 sekúnd) a v siedmej sekunde sme zapli režim Hold.
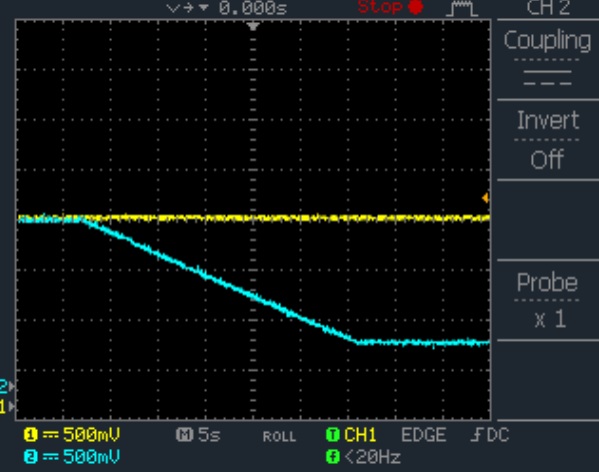
Približne za 30 sekúnd výstupný (modrý) priebeh „vycestoval“ na doraz, bez toho, že by sa knipla niekto vôbec dotkol (žltý priebeh je úplne vodorovný).
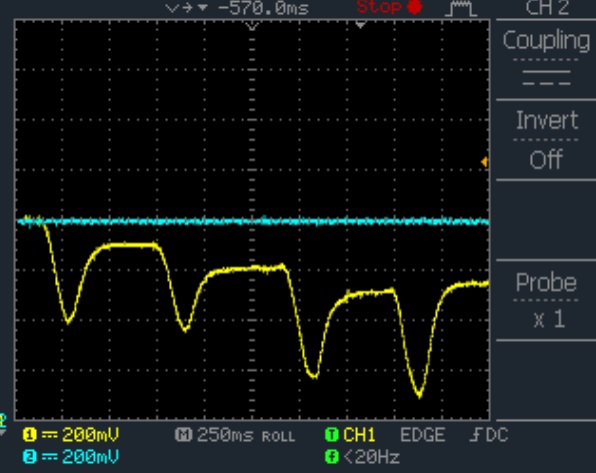
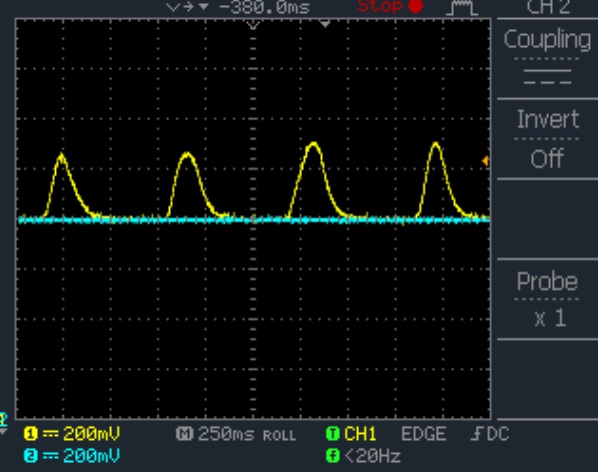
Ak sa kniplom hýbe len na jednu stranu, je situácia ešte názornejšia. Štyri krátke „ťuky“ do knipla majú na výstupe stabilizera takýto následok:

Štyri krátke „ťuky“ do knipla z opačnej strany majú takýto následok:
Z týchto dôvodov je pre nás režim Hold nepoužiteľný. Pri praktických skúškach (v dostatočnej výške) sme ho VŽDY museli po pár sekundách vypnúť, inak hrozilo nepredvídateľné správanie sa modelu a jeho následná havária.
V režime Rate sa „strašná necnosť“ neprejavuje:
Žiaľ, režim Rate len zmierňuje následky rušivých vonkajších vplyvov (napr. poryvov vetra), avšak nedokáže model vrátiť do (pôvodnej) polohy (ako pred poryvom), tak ako to dokáže dobre navrhnutý režim Hold.
Ostatné, nám známe stabilizačné systémy (napr. FY-30A) a ani náš AssOrx touto necnosťou netrpia.
Preto by nás potešilo, keby nejaký skúsený programátor v "Céčku" dokázal v tomto zdrojovam kóde (FlightStab.ino prípadne FlightStab.h) nájsť (my Céčko neovládame), ktorá jeho časť je zodpovedná za "strašnú necnosť". Potom by sme spoločnými silami dokázali túto časť kódu "odpárať", prípadne ju upraviť a po skompilovaní by vznikol naozaj vynikajúci firmvér pre stabilizačný systém.
Na záver tejto časti si predstavme niektoré ďalšie (tentokrát dobré) vlastnosti Open stabilizera RX3S:
Prvou z nich je možnosť „Inflight Calibrate“:
Ak ste po zapnutí Open stabilizera menili pozície trimov (skrátka ste potrebovali model „dotrimovať“), zmenili ste tým „kalibračné“ hodnoty kniplov v stredných (neutrálnych) polohách. Tým je dynamické riadenie účinnosti stabilizácie (a aj iné funkcie) „pomýlené“. Aby ste to napravili (bez potreby pristátia a následného vypnutia a znuvu-zapnutia Open stabilizera), stačí počas letu (pri kniploch v neutrále) v priebehu pol sekundy 3-krát prepnúť režimy RATE/HOLD.

Ďalšou vynikajúcou vlastnosťou Open stabilizera RX3S je jeho správanie sa po hlbokom zakolísaní napájacieho napätia, kedy dôjde k resetu mikrokontroléra:
Mnohé stabilizačné systémy potrebujú na nábeh programu po resete procesora niekoľko sekúnd, počas ktorých „hrajú mŕtveho chrobáka“. Tento (pre modelára priam nekonečný) čas môže zaviniť (a často aj zaviní) haváriu v podstate neriadeného modelu. Open stabilizer sa po resete počas letu správa inak: z pohybov kniplov (prípadne aj modelu) zistí, že sa nejedná o regulérne zapnutie systému (vtedy sa niekoľko sekúnd nesmie hýbať kniplami ani modelom) a preto prejde do „nestabilizovaného“ (avšak riadeného) režimu. Stabilizer prepúšťa riadiace signály zo svojho vstupu (z RC prijímača) na svoj výstup (do serv) bez akejkoľvek úpravy, takže model je normálne riadený pilotom, hoci bez efektu stabilizácie. Ak sa počas letu vyskytne dostatočne dlhý čas, počas ktorého sú kniple aj model v kľude, dôjde ku kalibrácii stabilizera a ten potom normálne a bez obmedzení plní svoju úlohu.
<Staršie | tento článok | Novšie>
Napísané: 6. 1. 2015, 10:23 | Prečítané: 10728x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 3
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Znovu jeden pekný "analytický" článok!
Moje skúsenosti sú rovnaké hoci závery z nich mám (trošku) iné ... S ohľadom na ostatných čitateľov tu nechcem z toho robiť technické diskusné fórum (ťažko mi je vyjadriť to 3-mi vetami). Môžem poslať mailom?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Dokonca by bolo dobré, keby to bol (tvoj) samostatný článok.
Pošli to na rcmodely@cevaro.sk
Kľudne môže byť, že moja interpretácia správania sa RX3S je nesprávna.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)