Umelý horizont v RC modeloch
Skôr naopak: urobili sme z toho "z núdze cnosť" a dokonca sme na tom postavili existenciu našej (už skoro päť ročnej) web stránky.
A tak dnes prichádzame s ďalším vý- (alebo nez-)myslom.
autor: Janko O.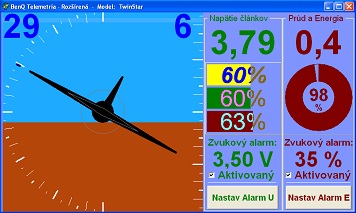 To, že asi nie sme bohvieako dobrí piloti a že naše modely používame skôr ako nosiče všakovakých technických výmyslov, ktoré majú korigovať (alebo skôr zamaskovať) naše pilotné (ne)schopnosti, je už dávno známe a my sa s tým ani nijako netajíme.
To, že asi nie sme bohvieako dobrí piloti a že naše modely používame skôr ako nosiče všakovakých technických výmyslov, ktoré majú korigovať (alebo skôr zamaskovať) naše pilotné (ne)schopnosti, je už dávno známe a my sa s tým ani nijako netajíme.









Začalo sa to tak "nevinne": niekedy teraz na jeseň (2014), keď Miroslav (mior) prišiel s myšlienkou, že by nebolo zlé vedieť, aký (bočný) náklon alebo (predo-zadný) sklon má model letiaci vo (veľkej) výške (za účelom dosiahnutia optimálnych letových výkonov (napr. veľkého vetroňa)). Netušiac, do akej pasce sa ma chystá vlákať, som mu dokonca pritakal: „Áno, obidvaja máme radi svoje modely vyvážené tak, že sú takpovediac ľahké na hlavu.“ Vtedy má model mnohé dobré vlastnosti, ale má menšiu mieru vlastnej stability. Túto situáciu ešte zvýrazňuje používanie (auto)stabilizačných systémov (v našom prípade AssOrx, alebo pripravovaný Open AssOrx). Ako som to niekedy dávnejšie zhrnul: „Mám rád, keď sa model správa ako vojak: keď ho nakloním, zostane naklonený, pokiaľ mu sám (kniplom) nedám príkaz na vyrovnanie. Model má robiť to, čo chcem ja (teda pilot) a nie to, čo chce on, alebo čo chce vietor.“
Trochu naivne som sa Miroslava spýtal: „Myslíš, aby pilot - modelár mal niečo ako umelý horizont?“ On s jeho typickým výrazom v štýle „zázraky na počkanie, nemožné do troch dní“ odvetil: „Čo, je to dáky problém?“ Keď zbadal zdesenie na mojej tvári, pokúsil sa ma ukľudniť tvrdením, že nemusí to byť priamo umelý horizont, stačí keď to bude LEN náklonomer (ale okrem náklonu musí merať aj sklon  ).
).
No a tak sme sa do toho pustili. Na HobbyKingu sme si vyhliadli vhodný 3-osý akcelerometer. Kým sme sa spamätali, bol Back-order a tak sme podobný (a dokonca lepší (so vstavaným stabilizátorom) a lacnejší) kúpili na eBayi. Po počiatočných experimentoch a „hrátkach“ s nakláňaním tohto čuda, sme usúdili, že by sa miroslavovo „skromnučké“ prianie predsa len malo dať realizovať.
Najskôr sme začali pracovať na grafike. Umelý horizont v skutočnom lietadle väčšinou vyzerá nejak takto:

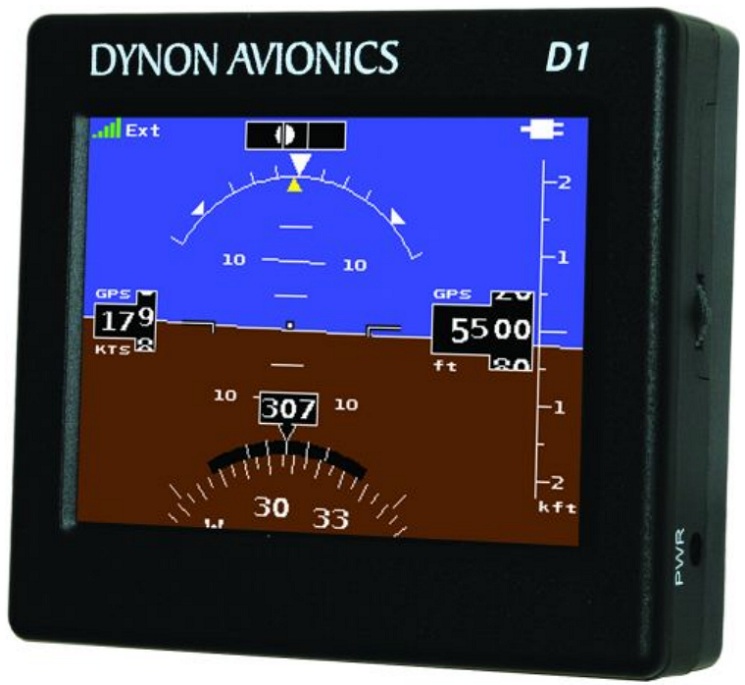
Modernejšia digitálna verzia už nelipne na „guľovitosti“ zobrazenia a okrem umelého horizontu môže zobrazovať aj ďalšie letové údaje:
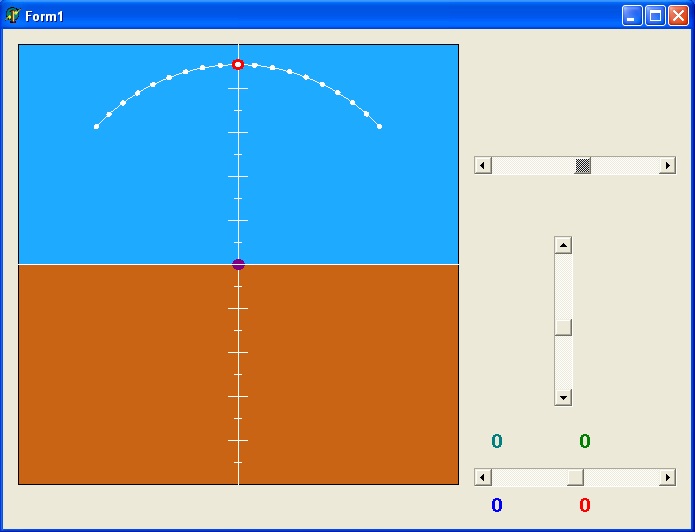
My sme na našom „náklonomeri“ nechceli zobrazovať zbytočne veľa hodnôt, veď Miroslavova prvotná požiadavka hovorila o zobrazení (bočného) náklonu a (predo-zadného) sklonu normálne letiaceho modelu v rozsahu +/- 45 stupňov a okrem toho modelár má čas na umelý horizont len na zlomok sekundy krátko „mrknúť“. A tak vzniklo toto vývojové štádium:
Na to by bohate stačili aj dve osi 3-osého akcelerometra, ale potom sme na internete „vyhrabali“ tento dokument: Aplikačnú nótu AN-1057 od firmy Analog devices. Na pár dní sa to pre nás stalo najpútavejšie čítanie posledného obdobia. Uvedomili sme si, že ak plne využijeme možnosti 3-osého akcelerometra, tak môžeme realizovať naozajstný umelý horizont. Žiadnych +/- 45 stupňov a dosť, ale pekne (dookola) 360 stupňov náklonu a 360 stupňov sklonu. A navyše s lepšou presnosťou a bez nežiadúceho vplyvu odstredivých síl a preťaženia pri obratoch.
V súvislosti s tým sme si znovu zopakovali trigonometriu, hlavne reverzné funkcie: arkus-sínus, arkus-kosínus a hlavne arkus-tangens (tan-1) (viď rovnice 11 a 12 v spomínanom dokumente). Našťastie programovací jazyk, v ktorom tvorime (a stále vylepšujeme) našu PC Telemetriu takéto funkcie (ArcTan) má. Keď sme náš náklonomer „rozchodili“, dospeli sme k názoru, že autor Aplikačnej nóty 1057 niečo také asi nikdy nezrealizoval, ale viac-menej len teoretizoval, pretože trigonometrické funkcie tangens (aj jej „proťajšok“ arkus-tangens) sú periodické nie v rozsahu 360 stupňov (ako funkcie sínus a kosínus), ale len v rozsahu 180 stupňov (-90° až +90 °). V preklade do praktického použitia to znamená, že umelý horizont postavený na základe výpočtov rovníc 11 a 12, uvedených v AN-1057 môže zobraziť maximálny náklon (a samozrejme aj sklon) len o 90° na jednu stranu a 90° na druhú stranu. Čiže môže zobraziť maximálne tak nožový let na „ľavoboku“ a nožový let na „pravoboku“, ale isto nemôže zobraziť situáciu, keď lietadlo (či model) letí „hore bruchom“. A to sa nám modelárom predsa len občas stáva  . A tak sme museli programový kód doplniť o výpočty, keď náklon alebo sklon je väčší ako 90° (čo zase nebol až taký problém).
. A tak sme museli programový kód doplniť o výpočty, keď náklon alebo sklon je väčší ako 90° (čo zase nebol až taký problém).
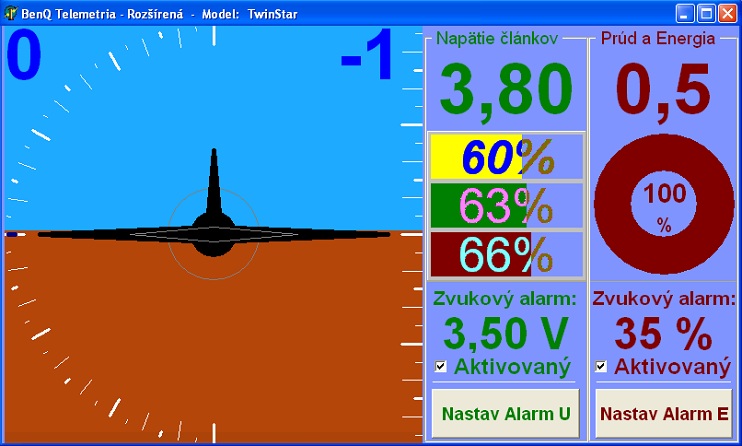
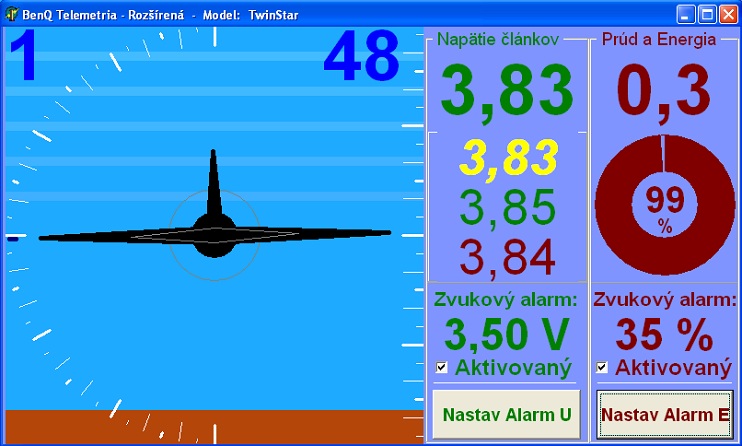
Keď už bolo všetko takmer hotové, narazili sme na ďalší problém: taký skôr psychologický, či filozofický, alebo ergonomický. Ono je totiž rozdiel riadiť lietadlo, v ktorom sedíte (a pozerať na umelý horizont), alebo riadiť model, pričom vy (pilot) ste stále v nezmenenej polohe, nohami pevne na zemi (a pozerať na umelý horizont). Výsledkom je nesúlad medzi vašimi pocitmi – vašim vnímaním reality a medzi tým, čo vidíte na umelom horizonte. Mozog odmieta uveriť umelému horizontu, ktorý ukazuje, že ste „hore nohami“, keď vy jasne cítite a vidíte, že pevne stojíte na zemi. Navyše ak je umelý horizont naklonený napr. doprava, znamená to, že lietadlo je v skutočnosti naklonené doľava. Názorne to ukazuje tento obrázok:

Pri pohľade na doprava "naklonený" umelý horizont máte tendenciu ho zrovnať a pohnúť kniplom doľava, ale tým situáciu len zhoršíte.
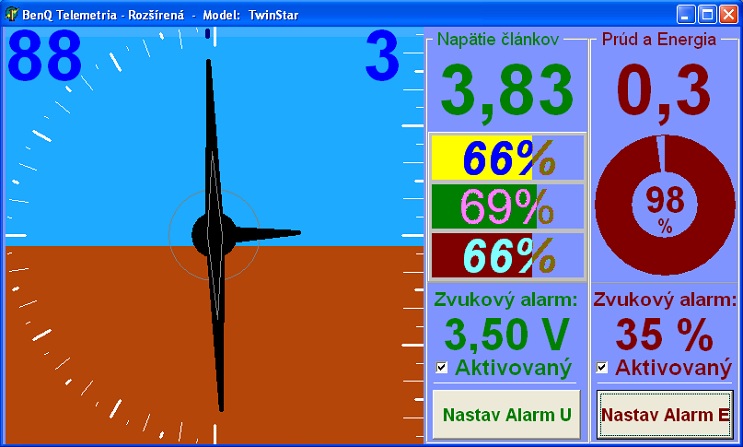
Dospeli sme k názoru, že takýto umelý horizont (aký je v skutočných lietadlách) je pre modelára skôr mätúci, ako pomáhajúci. A tak sme sa rozhodli naše poňatie umelého horizontu akosi „invertovať“ a vypracovali sme toto:
Síce ho (interne, medzi sebou) stále nazývame umelým horizontom, ale v skutočnosti to je skôr niečo ako „umelý model“  .
.
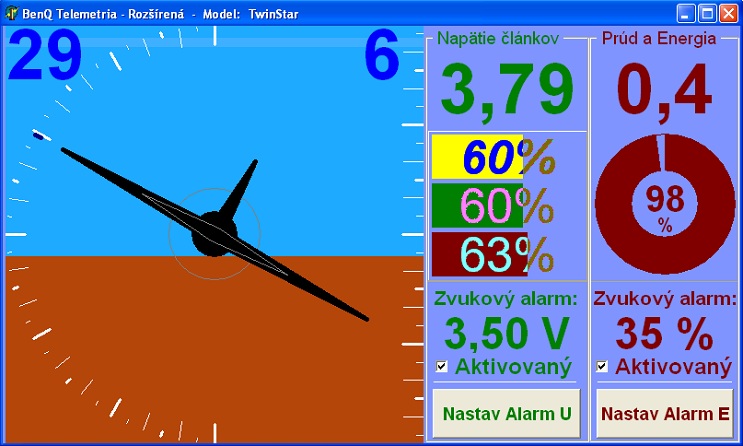
Vychádza z faktu, že nech je model v akejkoľvek polohe, tak modelár má zem vždy dole a nebo hore a ak sa niečo nakláňa, tak to nie je horizont ale model.
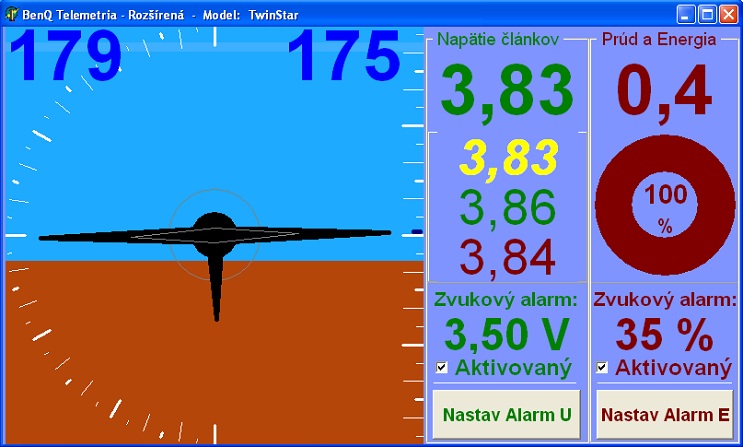
Toto zobrazuje náš "umelý horizont", keď model letí takmer vodorovne, ale "hore bruchom".
To znamená, že pohľad na náš umelý horizont je podobný, ako modelárov reálny pohľad na letiaci model. Treba si uvedomiť, že vždy je to pohľad akoby odzadu, teda na odlietajúci (ale nevzďaľujúci sa) model.
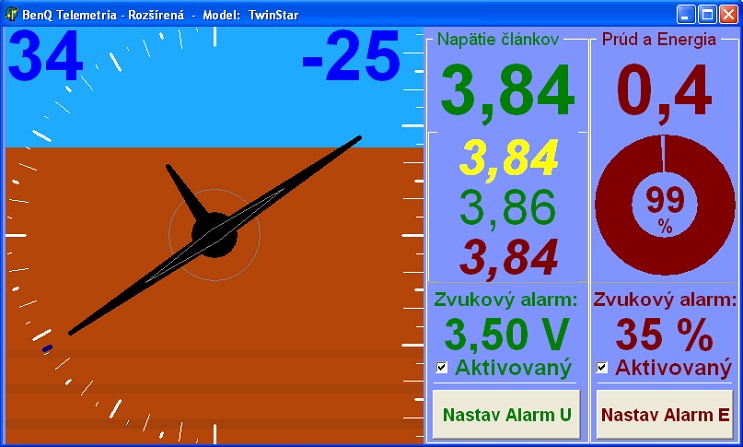
Ďalší problém, ktorý sme museli vyriešiť, je skutočnosť, že ak model letí strmo dole alebo strmo hore, tak na umelom horizonte vlastne nie je vidieť žiadny horizont, ale len jednoliatu hnedú (zem) alebo modrú (nebo) plochu. Vtedy je orientácia nemožná. My sme to vyriešili tak, že pri strmom klesaní začne umelý horizont zobrazovať „brázdy“ na (virtuálnom) poli, ktorých kontrast so strmosťou klesania narastá.
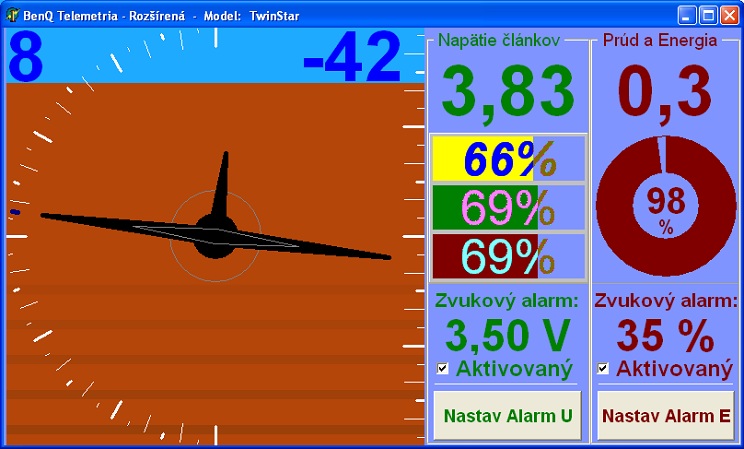
To isté sme urobili aj s „nebom“, kde sa pri strmom stúpaní začnú zobrazovať vodorovné úzke mraky, ktorých kontrast so strmosťou stúpania tiež narastá.
Ak model letí vodorovne, nevidno takmer žiadne „brázdy“ na virtuálnom poli, ani „mraky“ na virtuálnom nebi.
Samotná elektronika nám vyšla až neuveriteľne jednoduchá (v porovnaní s Diplomovou prácou, na ktorú sme neskôr pri surfovaní po internete narazili):
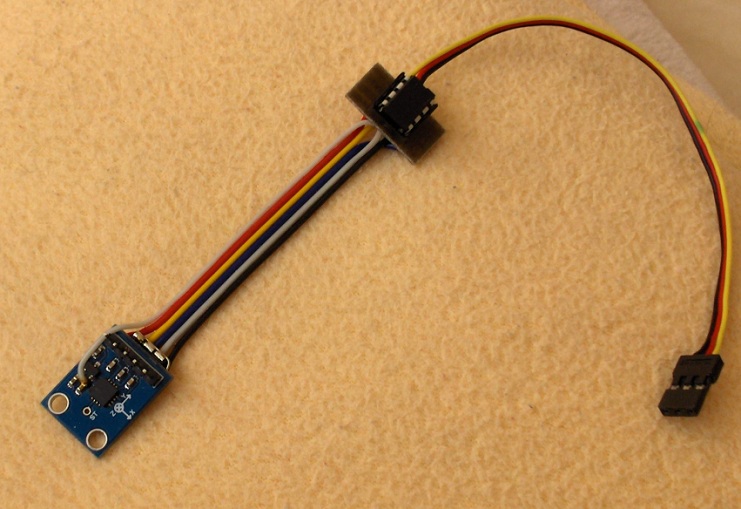
3-osý akcelerometer (vľavo) a expanzný modul (hore).
Keďže sme na module našej telemetrie už nemali dostatok voľných analógových vstupov pre signály x, y a z, prichádzajúce z akcelerometra, museli sme pridať tzv. expanzný modul, ktorý spomínané signály zdigitalizuje, pred-upraví a pošle do (hlavného) telemetrického modulu. Ten im priradí adresy, „zabalí“ do paketov a odošle (pomocou FrSky telemetrie) na zem.
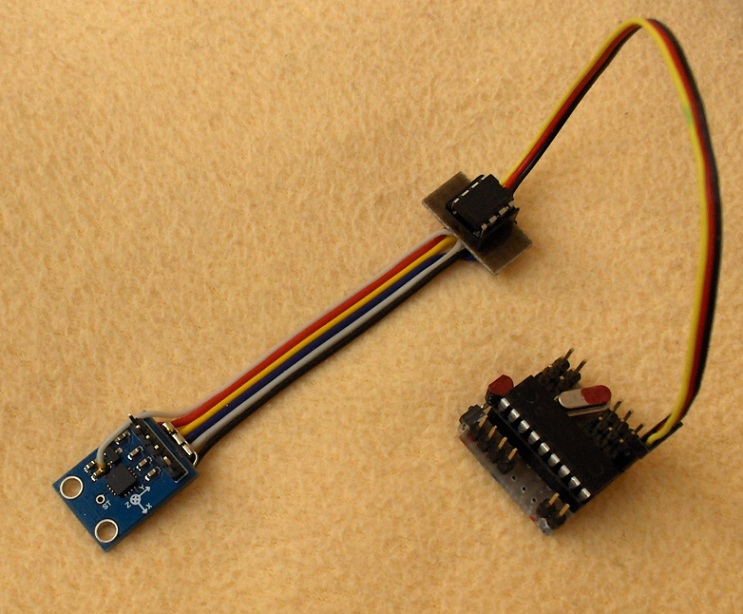
Pripojenie do telemetrického modulu (vpravo).
Ako vidno, hardvér je naozaj jednoduchý, ale ťažisko väčšiny práce spočívalo v softvéri – v programovaní. Sú celkom tri: softvér v expanznom module, softvér v telemetrickom module, ale najmä rozsiahly softvér v počítači BenQ S6, ktorý zobrazuje našu PC Telemetriu, ale generuje aj zvukové (varovné a informačné) hlásenia (síce syntetickým, ale príjemným ľudským hlasom).

Na našej PC Telemetrii pribudla ďalšia voľba (dotykové tlačidlo): (umelý) Horizont.
Zatiaľ bol náš umelý horizont testovaný len doma – na stole. Jeho presnosť je lepšia ako jeden stupeň (1°) náklonu alebo sklonu, ale zobrazovanie je „zaokrúhlené“ na jednotky stupňov (desatiny nie sú "vizualizované" ani zobrazované). V najbližšom období bude umelý horizont nainštalovaný do modelu NET - „Nosiča Experimentálnych Technológií“ a v prípade priaznivého počasia overovaný v praxi.
<Staršie | tento článok | Novšie>
Napísané: 2. 1. 2015, 11:24 | Prečítané: 10404x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 5
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Inak k tej orientácii horizontu, existujú dva systémy. Vami realizovný je vlastne ruský. Raz dokonca kôli tomuto padlo veľké dopravné lietadlo, pilot bol zvyknutý na ruský a keď prešiel do amerického lietadla, tak sa v krízovej situácii pomýlil.
odkaz
Rasto.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Bohužel, jsem ale zjistil jednu zajímavou věc: Letadlo když se nakloní na bok, tak neletí dál rovně, ale začne zatáčet. Tím, jak zatáčí ale způsobí že výslednice sil působících na akcelerometr (gravitační + odstředivá) je víceméně stále kolmo vůči trupu letadla. Můj závěr je tedy: Akcelerometrem nelze měřit naklápění letícího letadla. (nemluvím o vznášejícím se vrtulníku). Dokonce platí to, že ideální zatáčka je taková, kde výslednice sil je přesně kolmo na trup letadla.
Pro měření náklonu letícího letadla je třeba použít kombinovaný senzor akcelerometr a gyroskop, např. MPU6050. K tomu je knihovna (minimálně pro Arduino) která vrací kompletní údaje o náklonu i rychlosti rotace ve všech třech osách. Gyroskop totiž zjistí rotační složku pohybu a tu zkombinuje s měřením z akcelerometru.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Takže, vďaka za ne.
Vidno, že na tom ešte treba popracovať.
Dík.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)