ArduPilotMega - 2.časť
Dozviete sa niečo o:
programovaní ArduPilota, softvéri pozemnej stanice a firmvéri ArduPilota.
autor: CzechUavGuy
pripravil: Janko O. Pokračujeme druhou časťou seriálu o zariadení ArduPilotMega.
Pokračujeme druhou časťou seriálu o zariadení ArduPilotMega.









Programování ArduPilota
Programové vybavení se skládá ze dvou částí:
- Firmware ArduPilota - což je software uložený ve flash paměti v ArduPilotovi
- Software pozemní stanice (ground control station)
Software pozemní stanice
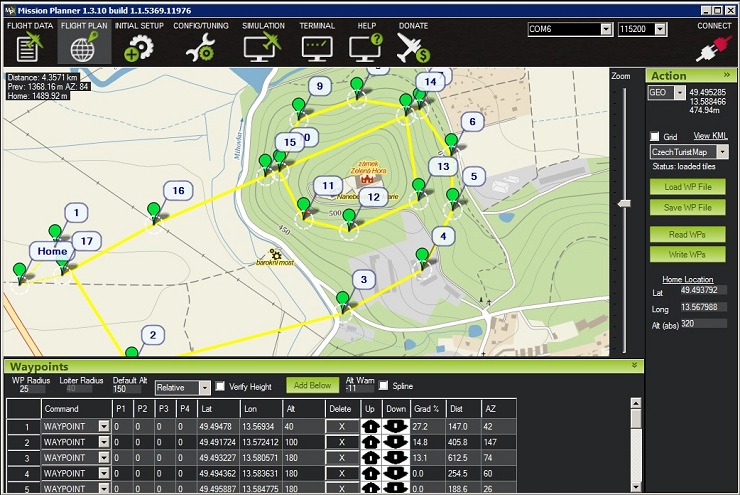
Existuje několik softwarů, pro PC s Windows je k dispozici MissionPlanner.
Toto je ideální software pro úvodní nastavení autopilota, naprogramování trasy a stahování logů z dataflash. ArduPilot se propojí kabelem USB-microUSB s počítačem, na počítači se spustí MissionPlanner, v něm se vybere virtuální seriový port který se automaticky vytvoří a program se spojí s ArduPilotem. Jako velkou výhodu MissionPlanneru vnímám možnost zobrazovat mapové podklady od Seznamu - ten má velmi kvalitní turistické mapy ČR i SR. Díky detailním vrstevnicím se dá pohodlně plánovat výškový profil letu pro autonomní lety.
Pro mobilní telefony a tablety s OS Android je k dispozici též několik softwarů, např. DroidPlanner nebo AndroPilot. Vzhledem k menšímu rozměru obrazovky není plánování trasy tak komfortní, ale zase jsou užitečné pro sledování telemetrie již letícího letadla. ArduPilot je s Androidem propojen tentokrát samozřejmě bezdrátově - buď telemetrií z vysílačky anebo přímo vlastním telemetrickým hardwarem, např. 3DR radio. Já mám zatím pouze zkušenosti s telemetrií z vysílačky, k tomu bude příště samostatný článek.
Firmware ArduPilota
ArduPilot je postaven na OpenSource softwaru, který se neustále vyvíjí. Čas od času se objeví nové verze, které se dají do ArduPilota nahrát. Toto funguje naprosto automaticky po spojení s MissionPlannerem. Po každém updatu je třeba být k ArduPilotovi nedůvěřivý a pečlivě ho otestovat.
K tomu, aby ArduPilot věděl jak daný model ovládat, musí být nakonfigurován. Konfigurační wizard je součástí MissionPlanneru a je celkem přímočarý - po připojení autopilota člověk vybere typ modelu, pak zkalibruje senzory. V dalším kroku nakonfiguruje na jakých kanálech má jaká serva, jejich reverzy a serva zkalibruje. V tomto kroku je dobré nastavit failsafe. Dále už musí uživatel trochu zápasit s tím, když má něco nadstandartního - např. já mám křidélka zapojena ne přes Y-kabel, ale každé zvlášť. Nastavení vztlakových klapek. Nastavení letových režimů – na základě určitého kanálu se ArduPilot umí nastavit do různých režimů:
- manuální režim (pass-through) - to co přijde na vstup pošle na výstup
- RTL (panic button) - autopilot vyrovná let do stabilizované polohy, vrátí se na místo startu a v předdefinované výšce krouží s předdefinovaným rádiusem
- FBWA - autopilot přijímá požadavky pilota ale omezuje je tak, že se chová podobně jako autíčko - omezí boční a přední úhel náklonu na předdefinovanou mez
- AUTOTUNE - autopilot se učí ovládat letadlo. Podobné jako FBWA s tím, že autopilot sleduje výchylky letadla a upravuje svoje řídící parametry.
- AUTO - autopilot samostatně letí předdefinovanou trasu, kterou do něj pilot předtím pomocí MissionPlanneru nahrál
- STABILIZE - podobný jako manuální režim, ale stabilizuje let – stejně jako při použítí gyroskopů.
Když ArduPilot zná základní informace o letadle, je načase jej naučit s letadlem létat. K tomu slouží režim AUTOTUNE. Po kompletním zapojení letadla je záhodno zkontrolovat smysly výchylek v režimu manual i v režimu Autotune. Přepnout režim na manual a vyletět s modelem do rozumné výšky.
Přepnout režim na autotune a "kvedlat" výškovkou a křidélky. Mělo by být patrné postupné zlepšování reakcí modelu na povely. Po přistání je možné nakonfigurované parametry stáhnout do počítače a upravit. Na můj pomalolet stačilo zhruba 60 minut letu v tomto režimu (čím déle, tím lépe). Autoři projektu doporučují následně pokračovat manuální kalibrací. K tomu je dobré mít rozchozenou bezdrátovou telemetrii a ideálně zaškoleného pomocníka, který letadlo programuje za letu. Konfiguračních parametrů je hodně přes 100, proto jsem se do této oblasti nikdy příliš seriozně nepustil. Možná s výkonějším letadlem?
V příštím článku popíšu jak jsem se popasoval s přenosem telemetrie pomocí FrSky a dvou Arduin.
Odkaz na video mojeho autonomního letu:
https://www.youtube.com/watch?v=-EfmJ-RF9m8
<Staršie | tento článok | Novšie>
Napísané: 2. 12. 2014, 16:00 | Prečítané: 7637x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)