ArduPilotMega - 1.časť
Ich autorom je náš kolega - český modelár, používajúci prezývku CzechUavGuy, ktorý sa v tejto problematike dobre vyzná.
A čo to vlastne ArduPilot je?
Je to zariadenie podobné známemu FY-41AP (ktorého fantastické možnosti mi predviedol Stano O. a sú zmieňované v článku „Veď aj toto je (len trochu väčšie) Horten UFO“), avšak založené na platforme OpenSource Arduino.
autor: CzechUavGuy
pripravil: Janko O.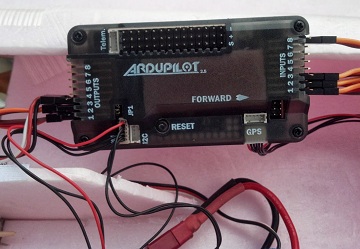 Dnes spúšťame sériu článkov o zariadení ArduPilot.
Dnes spúšťame sériu článkov o zariadení ArduPilot.









Odkaz na článok Veď aj toto je (len trochu väčšie) Horten UFO
Úvod
ArduPilotMega je zařízení, které nám - RC pilotům - poskytuje další level létání - umožňuje totiž spoustu věcí zautomatizovat. Mezi nejzajímavější výhody bych jmenoval:
- Plně automatický režim kdy letadlo prolétá předprogramovanou trasu pomocí 3D GPS waypointů
- Zjednodušené ovládání letadla pro začátečníky kteří nemají zájem učit se opravdovému ovládáníí - letadlo se chová jako auto, jezdící v určité výšce. Pilot pouze zatáčí. Je dodržován maximální náklon letadla v obou osách
- Panic button! V případě že pilot z jakéhokoliv důvodu ztratí kontrolu nad letadlem, může vyslat povel a autopilot letadlo stabilizuje a vrátí se na místo startu kde krouží, než si jej pilot převezme zpět. Tento mód je vhodné nastavit jako failsafe při výpadku spojení s vysílačkou
- Automatický start a přistání
Samořejmě jsou i nevýhody:
- cena (70E+), hmotnost (40g+) , objem, zvýšená komplexita
- není to úplně Plug&Fly řešení - je třeba chvíli studovat
Tento článek neslouží jako návod na používání dané platformy, ale spíše jako seznámení se schopnostmi a možnými rozšířeními. Návodů je k dispozici spousta na internetu, většinou samozřejmě v anglickém jazyce. Kdo je seznámen s touto technologií, nechť si počká na další článek, kde popisuji přenos telemetrie ArduPilota přes FrSky, což se myslím jinde nedočtete.
Zařízení se dá sehnat z číny, stojí od 70EUR na ebay. Doporučuji pořídit současně s GPS, aby se zvýšila šance, že GPS bude mít kompatibilní konektor.
ArduPilot umí ovládat nejen letadla, ale i létající křídla, kvadro(a více) koptéry, auta, lodě a další. Nejvíce je používán k ovládání n-koptér, já se zaměřuji na použití s letadlem klasické konstrukce (křidélka, výškovka, směrovka, motor).
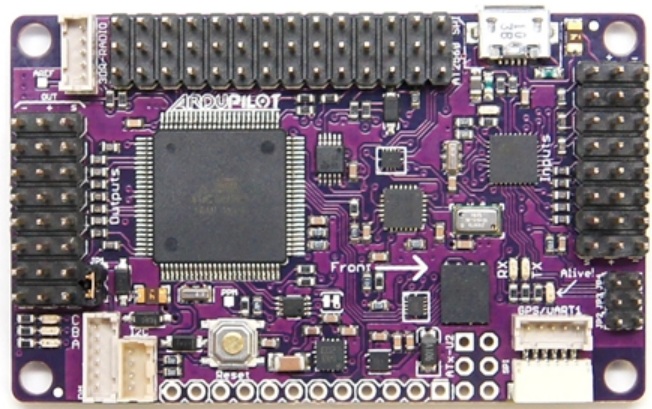
Popis HW ArduPilota
ArduPilotMega je mikrokontrolér s několika senzory, založený na opensource hardwaru i softwaru. De facto se jedná o Arduino Mega 2560 na vlastním tišťáku (plošnom spoji - pozn. j.o.). Existuje několik variant, já vlastním verzi APM2.6. Na PCB je napájen polohový senzor (tříosý akcelerometr a gyroskop MPU6000) a barometr (MS5611). Externě je třeba připojit modul GPS, volitelně tříosý magnetometr. Kromě těchto senzorů je na tišťáku integrovaná paměť flash o velikosti 2MB. Na tišťáku je "inteligentní" řešení napájení - mikrokontrolér a senzory mají vlastní napájecí okruh, serva mají druhý okruh. ArduPilot umí obsluhovat i další externí senzory - pitotovy trubice, proudový a napěťový senzor, gimbál na kamerku či směrovou anténu atd.
Zapojení ArduPilota
ArduPilot má spoustu vstupních a výstupních portů:
- Obsahuje 8 vstupních servo pinů na signál z RX, z těch může být napájen mikrokontrolér.
- Obsahuje 8 výstupních servo pinů na serva. Sem se zapojuje další zdroj napětí pro serva, typicky z ESC.
- Obsahuje dva alternativní porty na GPS. Dva jsou proto, že existuje víc druhů konektorů, obsluhovat naráz umí myslím pouze jednu GPS.
- Obsahuje I2C port, typicky pro magnetometr
- Obsahuje 14 portů pro externí senzory
- Port pro měření napětí jednotlivých článků baterie a proudového senzoru. Z tohoto portu může být napájen mikrokontrolér.
- Port pro telemetrii - konfigurovatelný UART
- Na tišťáku jsou připravené ale nenapájené další UART vývody z procesoru atmega.
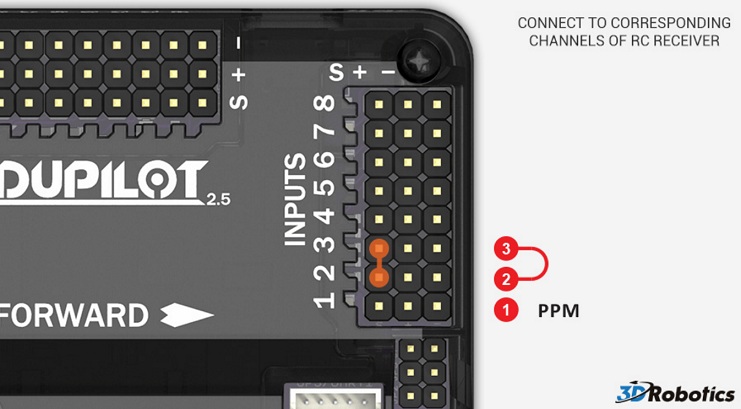
Vstupní signály z přijímače umí ArduPilot číst ve formátu PPM, tím se ušetří dost drátů. Pro zapnutí režimu PPM je třeba jumperem spojit datové piny druhého a třetího konektoru.
Zásadní komponentou ArduPilota je GPS. Je podporováno několik druhů, já jsem se spokojil s modulem UBLOX NEO-6M. Je to poměrně velký (50x50x13mm) a těžký (24g) modul. Přesnost je v letadle, když létám nad terénem, bez problému. Pod úrovní terénu jsem zatím netestoval. ArduPilotovi posílá údaje s frekvencí 5Hz, což je pro pomalolety v pohodě (na to, aby letadlo poznalo že proletělo waypoint jsem nastavil rádius 25m, letadlo letí rychlostí kolem 10m/s). Na této GPS je integrován magnetometr. Magnetometr pro letadla není nutný, mě se jej bohužel dokonce ani nepodařilo rozumně nakalibrovat.
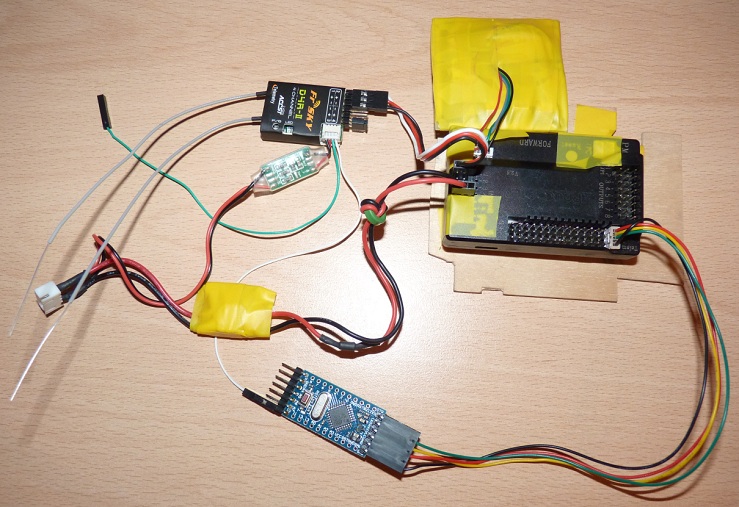
ArduPilot sice používá standartně dva napájecí okruhy, ale je možné okruhy spojit jumperem a používat pouze jeden zdroj napětí. Naštěstí má jumper rozteč 2mm, aby to nebylo až tak snadné. Já mám sice pouze jednu palubní baterii, ale okruhy využívám oba dva. Silovým vodičem baterie napájím ESC, který má BEC kterým napájím servo okruh. Na balanční konektor baterie jsem připojil malý BEC kterým napájím ArduPilota a jeho senzory. Paralelně k BECu jsem připojil FrSky napěťový senzor, který je připojen rovnou do přijímače, takže mi vysílačka standartně píská i když nesleduji telemetrii.
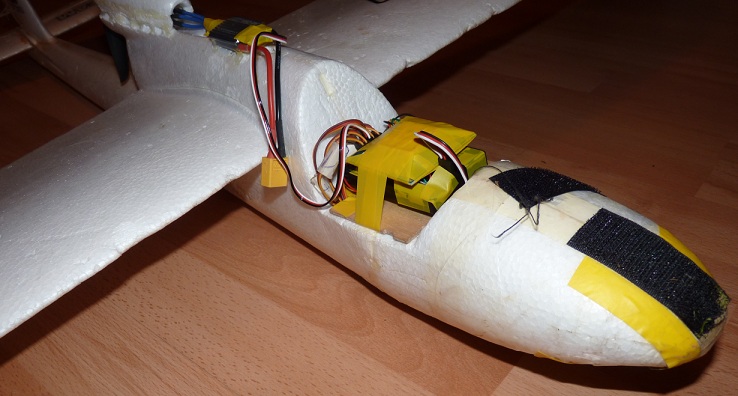
Připevnění ArduPilota na letadlo
ArduPilota jsem nainstaloval na letadlo Pelikán Beta 1400 místo kabinky. Vyřízl jsem si z překližky o síle 2mm destičku, která se do letadla zacvakne. K destičce je autopilot přilepen dvojitou vrstvou oboustraně lepící tlumící fólie. I když je v Betě poměrně hlučný motor, který znatelně vibruje celým letadlem, žádný problémový vliv těchto vibrací jsem na autopilotovi nezaznamenal. GPS jsem přimontoval nahoru na autopilota, dohromady olepil elektrikářskou páskou, takže pevně drží a zároveň je to částečně nepromokavé. Poloha GPS není ideální - nevidí celý horizont a je relativně blízko silových vodičů. I tak je GPS signál v této pozici dostatečný.
ArduPilot je k dostání s plastovou krabičkou, která ho chrání mechanicky.
Krabička není nezbytná, je to zátěž navíc - váží 13g. Vzhledem k tomu, že se mi ArduPilot nevejde do trupu letadla a je přidělán místo kabinky zvenku, krabičku používám. Pokud by byl ArduPilot bez krabičky, je třeba skrýt barometr, který je citlivý na poryvy vzduchu - např. jej schovat pod kus houbičky nebo alespoň papírového kapesníku.
<Staršie | tento článok | Novšie>
Napísané: 25. 11. 2014, 08:05 | Prečítané: 9314x | Kategórie: Lietanie | Napísal: admin |
Komentáre: 3
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
rozhodujem sa mezi 3DR Telemetry moduly s frek 915Mhz a 433 Mhz, mozte mi poradit ake su vyhody a nevyhody
odkaz
odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Bohužel na stránkách odkaz jsem nic o 433 nenašel, tak snad se nepletu.
V ČR je to odkaz
Výhoda 915 je že má menší anténu, ale zas bude v EU zarušená od mobilních sítí.
Pro experimentování jsem si tento modul koupil též, žádné zázraky jsem z něj zatím nedostal - dosah pouze do 100m a ještě k tomu s velkými výpadky. Ale to je odvislé od kvality antény, zatím jsem použil pouze ty co jsem k tomu dostal, a v nich jsou jen ty klasické stočené drátky (viz 433 helical antena).
Na žádné oficiální stránce jsem nenašel nic o tom že by existovala hardwarová verze APM2.8, nicméně z popisu se mi celkem líbí. Snad to číňani vymysleli dobře.
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)