Orange Flight Stabilizer (RX3S) s Open Source – 4. časť
Pre tých, ktorým sa neoplatí zakúpiť „flešovaciu hlavicu“ je tu zopár fotiek, ako pripojiť Programer k doske letového stabilizátora RX3S.
V druhej časti článku:
Činnosť a najdôležitejšie vlastnosti Open Stabilizera.
autor: Janko O.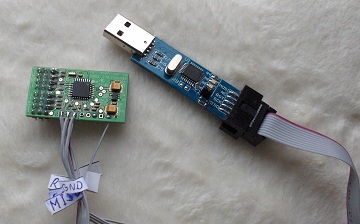 V prvej časti tohto článku:
V prvej časti tohto článku:









V minulej (tretej) časti tohto seriálu sme uviedli spôsob, ako si Orange Flight Stabilizer (RX3S) preflešovať bez akéhokoľvek spájkovania, s použitím „flešovacej hlavice“ Atmel Atmega Socket Firmware Flashing Tool:
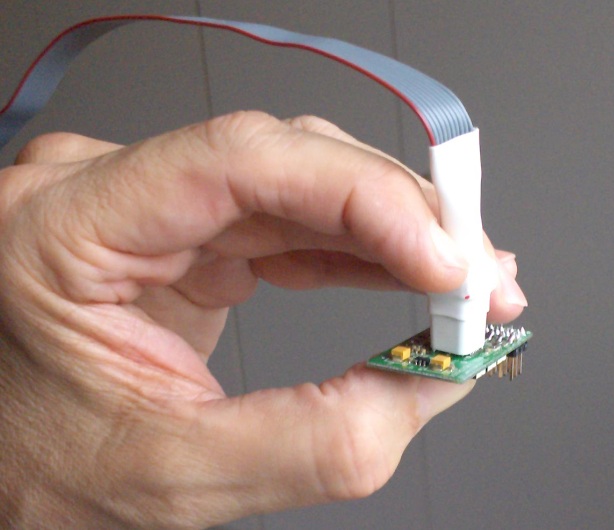
Takto držím RX3S a flešovaciu hlavicu počas flešovania. Pravou ruou ovládam počítač.
Avšak mnohým modelárom sa neoplatí kvôli preflešovaniu jedného či dvoch Flight Stabilizerov kupovať túto jednoúčelovú pomôcku. Hoci vždy je tu možnosť „zgrupovania“, keď sa niekoľko modelárov (spravidla z jednej lokality) dohodne na zakúpení jedného kusu USBasp 3.3V / 5V AVR Programera a jedného kusu flešovacej hlavice pre spoločné použitie.
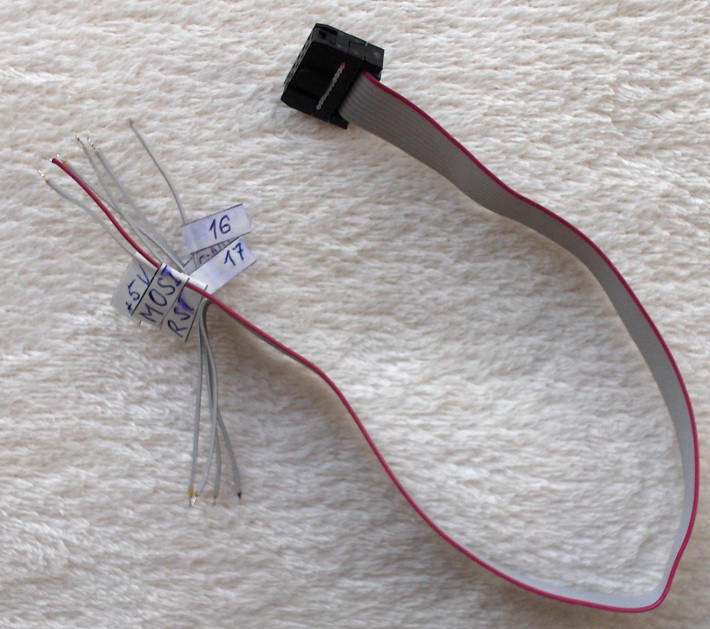
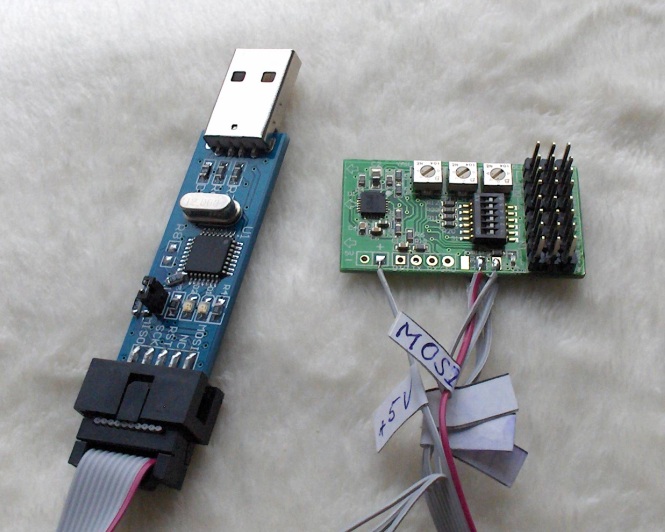
Ale pre modelárov, ktorí ani takúto možnosť nemajú, stačí zakúpiť len USBasp 3.3V / 5V AVR Programmer a upraviť plochý 10-žilový kábel, ktorý je k nemu dodávaný. Jeden konektor sa odreže nožom (ešte lepšie je ho odstrihnúť nožnicami). Jednotlivé „pramene“ kábla sa v dĺžke asi 3 až 5cm „osamostatnia“ a konce v dĺžke 2 až 3mm odizolujú a pocínujú. Pomocou „pípania“ multimetra identifikujeme šesticu tých správnych vodičov, označíme ich a dostaneme napr. toto:
Potom označené vodiče prispájkujeme na rovnako označené vývody (obdĺžnikového tvaru) na doske RX3S. Začneme prepojením vodiča GND na Programeri s GND na RX3S. A potom analogicky: MISO s MISO, MOSI s MOSI, RST s RST a napokon SCK so SCK. Viď obrázok:
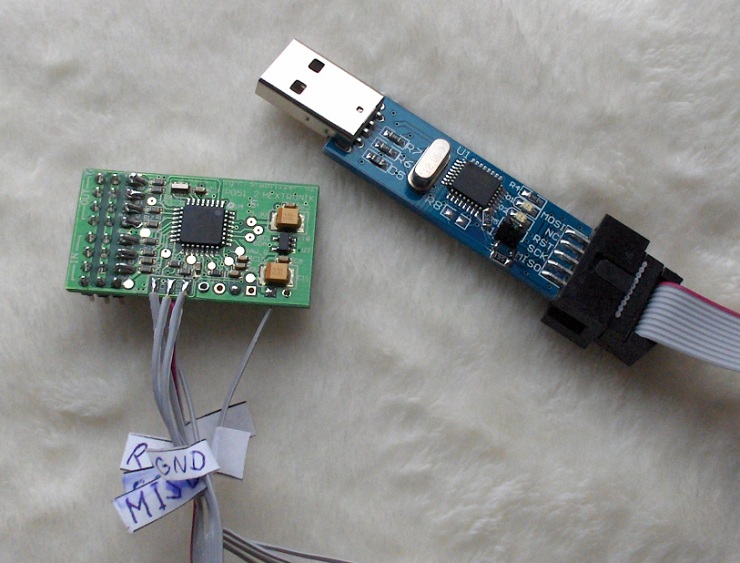
Dokonca môžeme pripojiť aj vodič z Programera, označený +5V, na vývod na plošnom spoji RX3S, označený symbolom +, tak ako to vidno na tomto (približne v strede) obrázku:
Takto pri programovaní nemusíme napájať RX3S samostatne cez (servo) konektor RX3S z BECu nejakého „voľného“ regulátora (napr. z havarovaného modelu), alebo zo samostatného UBECu, alebo z tzv. prijímačovej batérie (tak ako pri použití flešovacej hlavice), hoci máme Programer len na 5 Voltov. Na Programeri zasunieme „džamper“, tak aby na vývode označenom +5V bolo naozaj 5 Voltov.
Napätie 5V z vývodu (+) na plošnom spoji RX3S (tento vývod je štvorcového tvaru) je privedené na interný stabilizátor +3,3V, ktorým je napájaný procesor aj gyro-senzory letového stabilizátora Orange RX3S, takže nedôjde k ich poškodeniu, hoci sme použili Programer nastavený na 5V.
Samotné flešovanie potom už prebieha rovnako, ako pri použití flešovacej hlavice. Po preflešovaní odspájkujeme jednotlivé vodiče z dosky RX3S, odstránime prebytočnú kolofóniu a letový stabilizátor umiestnime do (pôvodnej oranžovej) krabičky.
Zapnutie a obsluha letového stabilizátora s novým firmvérom
Keď sme Flight Stabilizer zapojili tak, ako to bolo popísané v 2. časti seriálu, môžeme ho aj zapnúť. Dôležité je, niekoľko sekúnd s letovým stabilizátorom (a teda s celým modelom, ak je v ňom už zabudovaný) absolútne nehýbať a kniple vysielača nechať v kľudových polohách.
Vtedy totiž (na rozdiel od pôvodného RX3S) dochádza ku kalibrácii IMU (Intertial Measurement Unit), zjednodušene povedané dochádza k identifikácii „kľudových“ signálov gýr. A tiež dochádza k identifikácii signálov (krídielká, výškovka, smerovka) z RC prijímača, ktoré zodpovedajú „kľudovým“ polohám príslušných kniplov (keď pilot na riadiace páky nijako nepôsobí).
A ako zistíme, že už je kalibrácia úspešne ukončená? Jednoducho: servá zapojené do výstupov RX3S (Ail-L, Elev, Rudd, prípadne aj Ail-R) sa krátko vychýlia na jednu a hneď na druhú stranu a vrátia sa do svojich (teraz už identifikovaných) kľudových (stredových, neutrálnych) polôh.
Open Stabilizer je odteraz pripravený!
Samozrejme skôr ako s modelom poletíme, musíme nastaviť správnu orientáciu pôsobenia Flight Stabilizera – pôsobenie gyro-efektu. Podrobne je to popísané v článku „Ako umiestniť gyrá v modeli lietadla?“ Zmena oproti (v článku spomínanému) gyru MKS GY380 je tá, že na zmenu pôsobenia gyro-efektu nemusíme Open Stabilizer nijako otáčať, či polohovať (ako pri GY380).
Nastavenie zmyslu a miery (účinnosti) stabilizácie v jednotlivých osách (Roll, Pitch, Yaw) sa robí takto: na prepínanie zmyslu stabilizácie (Rud, Ele, Ail) sa používajú nastavovacie trimre. Keď je bežec príslušného nastavovacieho prvku - trimra v strede, stabilizácia je vypnutá. Otáčaním na jednu stranu sa účinnosť stabilizácie zvyšuje v danom zmysle (napr. Normal) až na doraz = 100%. Otáčaním na druhú stranu sa účinnosť stabilizácie zvyšuje v opačnom zmysle (napr. Reverz), opäť až na doraz = 100%:
.jpg)
Ešte predtým je nutné príslušným ovládacím prvkom na vysielači (potenciometer alebo 3-polohový prepínač) nastaviť mód stabilizácie (RATE alebo HOLD, a jeho mieru: od 0 do 100% a samozrejme OFF - vypnuté).
.jpg)
Tento ovládací prvok autori Open Source firmvéru Flight Stabilizera nazvali Master Gain. Spôsob jeho nastavenia je uvedený v závere 2. časti serálu, čoby naša mailová komunikácia so Stanom Oršulom.
Nastavením jednotlivých trimrov (Roll, Pitch, Yaw) na RX3S doľava alebo doprava (od stredu) nastavte tú správnu orientáciu pôsobenia gyro-efektu a ich mieru nastavte zhruba na polovicu rozsahu (Yaw (ovládajúci smerovku - Rudder) môže byť trochu viac, ale isto nie naplno).
Ovládací prvok na vysielači – Master Gain nastavte do módu RATE, tiež asi do polovice rozsahu. Ešte raz sa presvedčte, že ovládacie plochy modelu (krídielká, výškovka, smerovka) reagujú na nakláňanie a otáčanie modelu tak, ako je to spomínané v článku „Ako umiestniť gyrá v modeli lietadla?“
Pred štartom modelu nastavte Master Gain do polohy OFF – stabilizácia vypnutá. S modelom odštartujte. Naberte dostatočnú (na experimentovanie bezpečnú) výšku a zapnite stabilizáciu do módu RATE asi 50%. Opatrne skúste meniť dráhu letu: náklon, smer aj výšku.
Ak model začne „blbnúť“, okamžite vráťte Master Gain do polohy OFF. Znamená to, že niektorý zmysel pôsobenia gyro-efektu ste nastavili naopak.
Ak model „blbnúť“ nezačne, mal by byť o poznanie kľudnejší, voči poryvom vetra odolnejší a celkovo je jeho správanie také, ako keby to bol model väčší a ťažší. Pritom je však plne ovládateľný a stabilizátor vás pri riadení nijako neobmedzuje, dokonca ani pri akrobatických prvkoch. To je spôsobené vplyvom „dynamického riadenia účinnosti gýr“, ktorého nutnosť sme pochopili už pred rokmi: viď náš článok „Dynamické riadenie gýr v modeloch lietadiel“ a ktoré sme hneď od samého začiatku „zakomponovali“ aj do nášho AssOrxu.
Grafické vyjadrenie toho, ako „dynamického riadenia účinnosti gýr“ v Open Stabilizeri funguje, je na tomto obrázku:
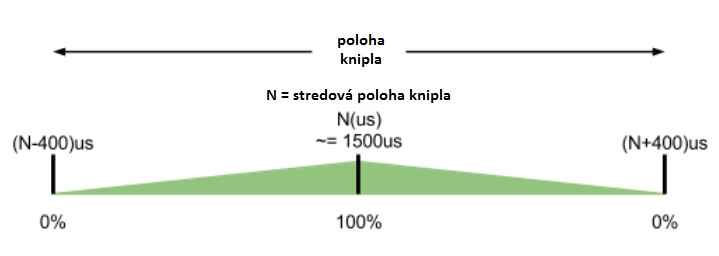
Miera stabilizácie (gyro-efektu) v závislosti od polohy riadiacej páky (knipla) zodpovedá výške zelenej plochy v danom bode.
Otáčaním potenciometra Master Gainu sa môžete pokúsiť zvýšiť mieru stabilizácie až do stavu, keď model (obzvlášť pri vyššej rýchlosti) začne mať prejavy nestability: rytmicky a opakovane sa nakláňa doľava – doprava (bude treba ubrať Roll), alebo predkom modelu (nosom) rytmicky a opakovane „šmenkuje“ doľava – doprava (bude treba ubrať Yaw), či hore – dole (bude treba ubrať Pitch). Vtedy treba Master Gain vrátiť trochu späť, až bude model opäť plne stabilný.
Správne nastavenie Flight Stabilizera býva pre každý model iné a môže to byť časovo náročný proces. Výsledkom by mal byť stav, keď pomocou Master Gainu stabilizáciu len vypíname (OFF), alebo zapíname (Master Gain je napr. na 100%), napríklad páčkovým prepínačom. Tú správnu mieru stabilizacie (maximálnu, ale bez prejavov nestability modelu) v jednotlivých osách je potom nutné nastaviť postupným citlivým nastavením trimrov Roll, Pitch a Yaw.
<Staršie | tento článok | Novšie>
Napísané: 11. 11. 2014, 18:47 | Prečítané: 11536x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 4
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 abych to vyčetl na netu. Na rozdíl od zobrazeného můj programátor nemá vývody popsané. Dík
abych to vyčetl na netu. Na rozdíl od zobrazeného můj programátor nemá vývody popsané. Dík
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)