Orange Flight Stabilizer (RX3S) s Open Source – 2. časť
To preto, že sme ešte neuviedli spôsob, ako si to môže modelár urobiť sám. Nie že by to bola nejaká veda, ale sú tu určité úskalia, ohľadne potrebných pomôcok, ovládania počítača z príkazového riadku, ale pri nevhodnom postupe aj možnosť „odpálenia“ stabilizátora.
Ale zatiaľ sme neuviedli ani spôsob pripojenia stabilizátora a jeho nastavenia a ani jeho správanie sa a možnosti. A tak vyššie spomínaní prví záujemcovia platia daň za svoju netrpezlivosť.
Pretože „nový“ RX3S sa nastavuje a správa úplne inak ako pôvodný RX3S.
autor: Janko O. Prvým záujemcom o Open Surce softvér pre Orange Flight Stabilizer RX3S sme procesor preflešovali zatiaľ my (a stále túto možnosť ponúkame).
Prvým záujemcom o Open Surce softvér pre Orange Flight Stabilizer RX3S sme procesor preflešovali zatiaľ my (a stále túto možnosť ponúkame).









Pre tých, ktorí si chcú Orange Flight Stabilizer RX3S preflešovať sami a nechcú počkať, pokiaľ (v niektorej nasledujúcej časti) uvedieme podrobný a veľmi zjednodušený spôsob ako na to, je tu odkaz na článok Open Flight Stabilizer for the Orange RX3S.
Z postupu uvedeného v tomto článku sme vychádzali aj my, ale pre niektorých môže byť problém angličtina, pre niektorých obsluha počítača z príkazového riadku a pre niektorých zdanlivá zložitosť postupu. Tí nech počkajú na ďalšie časti našej minisérie a zatiaľ nech si zoženú USBasp 3.3V / 5V AVR Programmer a ak nechcú nič spájkovať, tak aj Atmel Atmega Socket Firmware Flashing Tool. Ostatní, hurá na to.
Ale pozor! USBasp programmer treba v každom prípade prepnúť do režimu 3,3 Voltu, inak si môžete odpáliť stabilizátor. My sme taký nemali (z HK máme takýto: USBasp AVR Programming Device for ATMEL proccessors, ktorý je len na 5V) a tak sme to museli vyriešiť inak. A tiež upozorňujeme na to, že v súčasnosti už existuje „čerstvejšia“ verzia firmvéru (z 1.9.2014) a aby ste ju nemuseli hľadať a aby ste sa nemuseli „prehrabovať“ v množstve HEX súborov a dumať, ktorý je ten pravý, tak si ten správny (pre RX3S) môžete stiahnuť u nás, v sekcii Download, alebo TU.
Ale teraz sa chceme venovať hlavne pripojeniu a nastaveniu Orange Flight Stabilizera RX3S:
- Prvé, čo si všimnete je, že červená LEDka na stabilizátore nesvieti trvale ako predtým, ale bliká. To ako bliká, závisí od toho, čo sa so stabilizátorom deje a do akého režimu ste stabilizátor prepli.
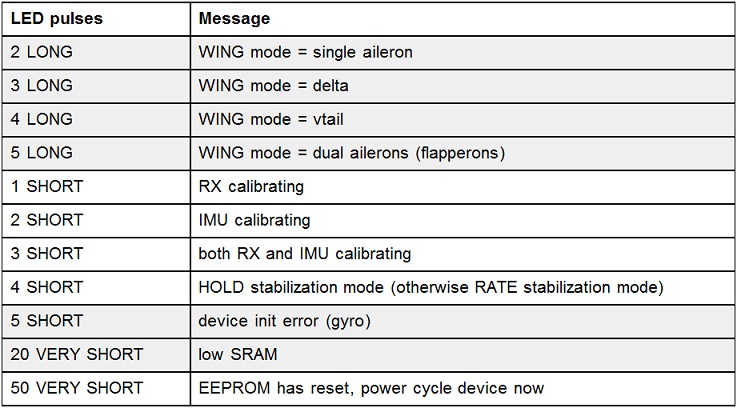
Význam blikania LED ozrejmuje nasledujúca tabuľka:
Režim nastavíme podľa toho, aké máme usporiadanie ovládacích plôch na krídlach modelu. Režimy prepíname DIP prepínačmi v strednej časti stabilizátora RX3S. V podstate nám na to stačia len dva DIP prepínače a to V-Tail a Delta. Ostatné (Aux Ctrl Gyo, Rud, Ele a Ail) sú v polohe Normal (Nor) a nebude potrebné s nimi manipulovať.
Jednotlivé režimy sú:
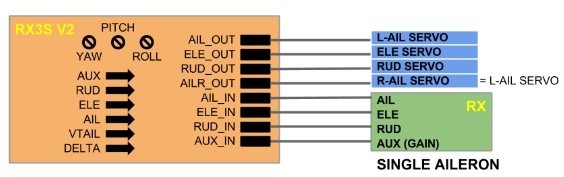
Klasické usporiadanie ovládacích plôch na krídlach modelu s krídielkami ovládanými spoločným (jedným) kanálom:
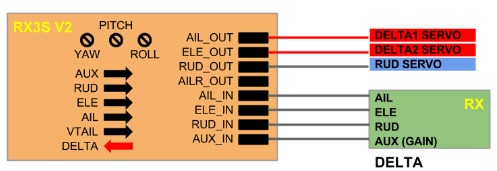
Model s Delta krídlom:
Model s chvostovými plochami do V (V-Tail):
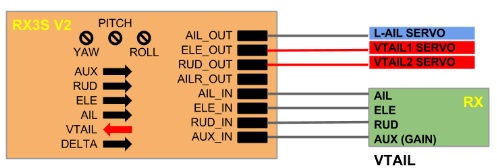
Klasické usporiadanie ovládacích plôch na krídlach modelu s krídielkami ovládanými samostatnými (dvomi) kanálmi (Dual Aileron). V tejto verzii je nutné do plošného spoja letového stabilizátora priviesť signál pre pravé krídielko (Ail-R), a to buď dva vodiče (signál (do bodu TX) a mínusový vývod (do bodu GND)), alebo úplne stačí len jeden vodič pre signál Ail-R (do bodu TX):
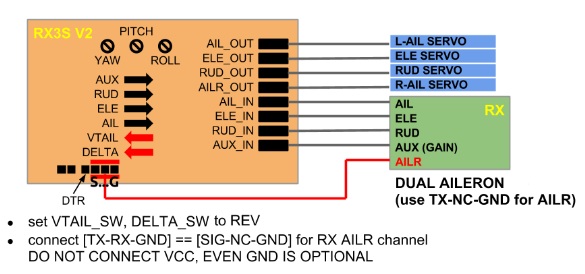
V žiadnom prípade do bodu RX (na plošnom spoji letového stabilizátora RX3S) neprivádzajte +5V z prijímača. Hrozí odpálenie RX3S.
Prepojenie medzi RC prijímačom a stabilizátorom nie je nutné vždy realizovať štvoricou 3-žilových káblikov. Niekedy je možné urobiť to podľa nasledujúceho obrázku, kedy na to stačia dva 3-žilové kábliky:
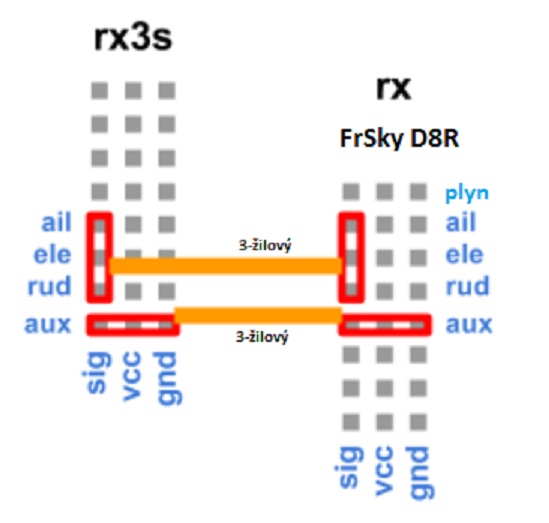
RC súpravy (vysielače) JR Propo a Graupner majú plyn na 1. kanáli a potom pekne za sebou nasledujú krídielká, výškovka a smerovka. Tiež niektoré vyspelejšie vysielače umožňujú "premapovať" jednotlivé kanály podobne ako je to na obrázku.
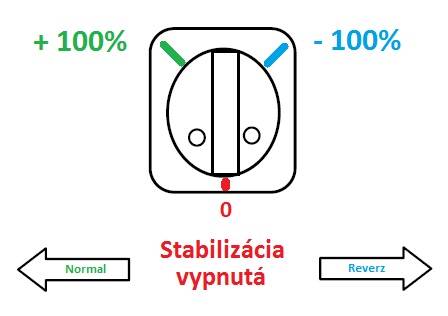
Nastavenie zmyslu a miery (účinnosti) stabilizácie v jednotlivých osách (Roll, Pitch, Yaw) sa robí inak ako to bolo na stabilizátore s pôvodným firmvérom. Na prepínanie zmyslu stabilizácie (Rud, Ele, Ail) sa nepoužívajú DIP prepínače (Normal – Reverz), ale len nastavovacie trimre, tak ako to majú renomované letové stabilizátory (FY-30A. Guardian 2D/3D …). Keď je bežec príslušného nastavovacieho prvku - trimra v strede, stabilizácia je vypnutá. Otáčaním na jednu stranu sa účinnosť stabilizácie zvyšuje v danom zmysle (napr. Normal) až na doraz = 100%. Otáčaním na druhú stranu sa účinnosť stabilizácie zvyšuje v opačnom zmysle (napr. Reverz), opäť až na doraz = 100%. Možno viac napovie obrázok:
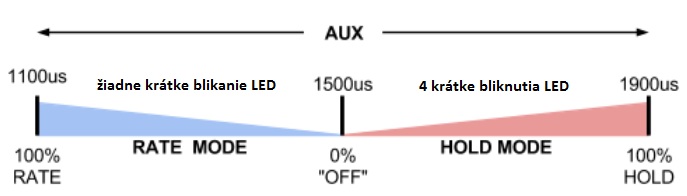
Odlišná je aj činnosť letového stabilizátora, v závislosti od toho, aký signál je privádzaný do vstupu Aux. Týmto signálom sa stabilizácia (vo všetkých 3 osách) vypína, alebo sa prepína medzi módmi RATE a HOLD. V závislosti od šírky impulzov sa mení aj miera (účinnosť) stabilizácie v danom móde.
Ak do vstupu Aux nie je privedený žiadny signál, je nastavený Mód RATE (klasické „gyrovanie“) s maximálnou účinnosťou (100%), samozrejme v závislosti od nastavenia trimrov, spomínaných v predchádzajúcom odstavci.
Ak je do vstupu Aux privádzaný signál so šírkou impulzov 1500us, je stabilizácia vypnutá. Správne nastavenie signálu je dosť kritické a Stano Oršula vie, o čom hovorím.
Výňatok z našej mailovej komunikácie:
Stano napísal:
„... skúšal som včera doma Orange 3AXIS s novým firmware a servá krídeliek pri stredovej hodnote signálu AUX zakmitávajú ...“ A Stano priložil aj názorné video.
Po overení situácie som mu odpísal:
„... Vstup Aux je dosť citlivý na tú správnu neutrálnu polohu.
Nastav dĺžku "neutrálnych" impulzov tak, aby si bol malinko-malinko v režime RATE (ako klasické gyrovanie). To poznáš podľa toho, že LEDka sa rozsvecuje 5-krát dlho (signalizuje režim Dual Aileron).
Ak si v režime HOLD, tak LEDka sa rozsvecuje 5-krát dlho a potom 4-krát krátko (toto signalizuje prepnutie do módu Hold).
A vtedy tiež servo robí tie čudné pohyby.
Tá správna poloha neutrálu je vtedy, keď akurát prestane to krátke blikanie a servá sa okamžite ukľudnia. ...“
Ak sú vstupné impulzy kratšie ako 1500us, je zapnutý mód RATE. Čím kratšie sú impulzy, tým je vyššia miera (účinnosť) stabilizácie v tomto móde. Ak sú vstupné impulzy dlhšie ako 1500us, je zapnutý mód HOLD. Čím dlhšie sú impulzy, tým je vyššia miera (účinnosť) stabilizácie v tomto móde. Obrázok je názornejší a navyše udáva aj dĺžky impulzov:
Ako bolo zmieňované vyššie, Stano Oršula neváhal a hneď po zverejnení prvej časti si nechal jeden RX3S preflešovať a po správnom nastavení ho aj osadil do svojho 3kW hotlinera. A natočil z tohto testovacieho letu aj krátke video, ktoré mi poslal. Stanov komentár:
„... ako som predpokladal tak gyro sa veľmi nemuselo namáhať počas prvého testu v kľudnom počasí, nabudúce si už počkám na poriadnu turbulenciu  ...“
...“
Video Orange RX stabilizer with open source firmware
<Staršie | tento článok | Novšie>
Napísané: 1. 11. 2014, 11:00 | Prečítané: 14595x | Kategórie: Open Stabilizer | Napísal: admin |
Komentáre: 12
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
1, ma po flashnuti toto gyro aj Head Lock mod?
2, je zase nutne mat zapojene fsetky vstupy, aj ked pri deltamixe smerovku nepouzivam?
Inak vdaka za super clanok, programator mam uz davno ( flashoval som s nim TG9x) a adapter k procaku je na ceste...
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
1. V maili "Terazkymu" sme Head Lock mód definovali asi takto:
Nie je to taká "plnokrvná" autostabilizácia, pretože nie je odvodená od signálov akcelerátorov, ale integráciou signálov gýr. Preto ustálený let v neutrálnom stabilnom režime zvládne len pár sekúnd.
Navyše táto autostabilizácia (tu nazývaná Attitude Hold) na nás neurobila nejak výnimočne dobrý dojem. Možno je to nevhodne namixovanými zložkami P, I a D. To sa však dá nastaviť, ale zatiaľ nám z HK neprišiel príslušný prístroj. Potom to skúsime zmeniť a uvidíme.
Nám sa tento režim zdal byť príliš "agresívny" - vhodný na akrobaciu.
Našou predstavou je však skôr "rekreačný" Attitude Hold, kedy tento režim vráti model do pôvodnej polohy po nečakanom poryve vetra. Nejaký nožový let s rukami vo vreckách nás neláka.
2. Pôvodne sme si mysleli, že je nutné mať zapojené všetky vstupy, ale práve včera sme to niekoľkokrát v rôznych konfiguráciách overovali. Odpoveď je NIE. Zapoj si len tie vstupy, ktoré budeš naozaj využívať.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Mam v kufriku dve Orange gyra, povodne som sa ich chcel zbavit ( jedno mi rozflaklo ero), ale mozno ich zoberem na milost...
Dobru skusenost mam s FC130, stoji prijatelny peniaz, na "doskaci" Blade od FreeAir chodi super, ale na deltamixe Su27 nafigu, skratka si s deltou moc nerozumie...
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
RATE mód sa mi zdal v pohode - to znamená, že podľa mňa stabilizátor robil presne čo mal. Aj pri vyššom nastavení citlivosti boli lety príjemné a hlavne pri pristávaní statočne pomáhal. RATE mód - proste super!
Ale Attitude HOLD mód - eééé !

To bolo pre mňa sklamanie, na ten som sa najviac tešil ...
Skúšal som rôzne citlivosti, opakované kalibrácie, ale nič - nepodarilo sa mi nič (dostatočne) použiteľné. Už na zemi, po zapnutí stabilizátora (autokalibrácii), všetky riadiace plochy "uchádzali". Čím vyššiu citlivosť (na trimroch stabilizátora) som nastavil, tým výraznejšie (rýchlejšie) kormidlá pochodovali do niektorej strany až na max. výchylky. Samozrejme, protizásahom na páčke vysielača som kormidlá vedel zase vrátiť do stredu (alebo kam som chcel), ale keď som s páčkami prestal pohybovať, tak to pochodovanie pokračovalo. Chvíľu sa mi zdalo, že sa to dá zastaviť použitím mikrotrimov, ale som to len spomalil, a keď som to prehnal, začalo to pochodovať do opačnej strany. A to na všetkých kormidlách (!) Pripadá mi to ako systémová chyba čítania z gyro-senzorov alebo neutrálnych polôh (?). Akoby sa kumulovali kvázi-nulové (teda nenulové) hodnoty stredových polôh páčiek (signálu) z prijímača a/alebo drifty zo senzorov. Alebo akoby neprebehli dostatočne presne inicializačné kalibrácie ...
Nulové polohy páčiek nikdy nie sú exaktne nulové, a takisto "nulové" hodnoty z gyro-senzorov tiež nikdy nie sú skutočne nulové. Preto drifty okolo "núl" by mali byť odfiltrované, ale to snáď programátori vedia - len neviem prečo mám sále pocit, že problém je práve v tomto. Sorry, nechcem nikoho poúčať, len sa mi to tak javí ...
Proste mojím výsledkom bolo, že Attitude HOLD mód sa mi dal využívať len na pár sekúnd (a to doslova), a to aj len keď bolo "dobre vytrimované" už pred letom. Neustále som musel tietadlo "dotláčať" do žiadnej polohy - takže do attitude hold to malo príšerne ďaleko. Jednoducho - nefungovalo to tak, ako som očakával - že zjednodušene povedané "namierim lietko kde chcem, zapnem HOLD a ono poletí tým smerom", to rozhodne nie :(. Navyše, ak som počas letu použil mikrotrim - teda neutrálna poloha sa číselne vzialila od teoretického (kalibrovaného) stredu, stabilizácia začala robiť psie kusy. Teda (v tomto stave) sa mi Attitude HOLD režim zdá prakticky nepoužiteľný, bojím sa použiť označenie "až nebezpečný" (!)
Inflight Calibration == rekalibráciu neutrálov počas letu, som neskúšal. Na začiatok som sa spoliehal na inicializačné kalibrácie, ergo ani mikrotrimy som počas letu nepoužíval. Trimovanie "inflight" sa ani viac-menej neodporúča, aj keď v dokumente "FlighStab Gide V3" je to formulované trochu inak :). A neviem ani či kalibrácia počas letu má vôbec nejaký význam, keď ani po inicializačnej kalibrácii HOLD režim dobre nepracuje ... aspoň mne nie :(
Mal s tým niekto podobnú skúsenosť? Tiež by ma zaujímalo, či to robí aj na RX3S bez spektráckeho prijímača. Na videu v tomto článku hotliner s takým lieta, ale nie je mi jasné v akom stabilizačnom móde, teda či aj v HOLD, alebo len v RATE móde.
Možno som niekde niečo prehliadol, takže ten stabilizátor (resp. fw) v žiadnom prípade neodsudzujem ... naopak, už len ten RATE mód funguje véééľmi dobre! A to dynamické riadenie citlivosti je úžasné ! V porovnaní s pôvodným fw je to bez debaty veľké vylepšenie. Novému fw dávam "palec hore" ... teda až na ten HOLD mód :)
Musím dôkladnejšie pohľadať na webe čo o tom píšu iní. Možno som naozaj niečo prehliadol a ešte aj na toho Holda zmením názor :)
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
A som rád, že so svojimi "pocitmi" (ohľadne HOLD módu) nie som sám. Takže to nie je len môj subjektívny pocit, ale vyzerá, že je to realita.
Tiež som sa na Hold mód veľmi tešil a tiež som z neho dosť sklamaný. Rovnako ako ty, som ho vždy po pár sekundách letu musel vypnúť, inak hrozilo, že s modelom havarujem.
Na spomínanom videu Stano lieta v móde RATE, lebo som ho na "nevhodnosť" HOLD módu vopred upozornil.
Podľa mojich testov dochádza pri HOLD móde v Open Stabilizeri nie len k integrácii signálov z gýr, ale aj k integrácii signálov z riadiacich pák - kniplov. Nechápem, čo k tomu autorov softvéru viedlo. Doteraz som si to vysvetloval tak, že takto je to vhodné pri riadení akrobatických modelov. Keďže taký model nemám a ani "divokú" akrobaciu nelietam, tak som to nevedel posúdiť, ale predpokladal som, že to tak má byť.
Náš AssOrx sa v tomto smere správa úplne inak, oveľa predvídatelnejšie a priateľskejšie a HOLD mód mám zapnutý počas celého letu (od položenia modelu na zem, následného štartu, celý let, až po pristátátie a zodvihnutie modelu rukami) a vypínam ho len keď prenášam model "ručne", lebo vtedy by "kormidlá cvičili".
Po pomerne komplexnom experimentovaní s nastaveniami Open Stabilizera mi vychádzajú len dve následné riešenia:
- úprava Open Source softvéru v procedúre HOLD mode do podoby blízkej AssOrxu (či už to urobí na náš popud JohnRB, alebo my sami, alebo niekto iný)
- pre tých, čo chcú naozaj funkčný a nezáludný HOLD mód, nezostáva nič iné, ako si postaviť AssOrx, ktorého jadrom bude RX3S s preflešovaným firmvérom.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Inak, ten ich zdroják je písaný dosť profesionálne, teda dalo by sa z neho vychádzať (pokračovať). A majú to písané dosť univerzálne, pre rôzne hw platformy, rôzne vstupy (PWM, CPPM, S.BUS) atď. Navyše, CPPM alebo S.BUS-ovým vstupom sa dá získať nejaký ten kanál navyše. Aj preto sa mi to celkom páči, len chytiť tú muchu s HOLD módom.
Ak si dobre pamätám, tak v AssOrx-e upravujete len vstupné PWM-ká. Inak AssOrx nepoznám, len z vašich článkov, takže si ho asi predsa len postavím a vyskúšam, už som si objednal bezprijímačový RX3S
 .
.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Problém je v tom, že ani ja a ani ty sme túto stabilizáciu neskúšali na naozaj akrobatických modeloch. Niekde som našiel reakciu akéhosi modelára, ktorý to osadil do riadneho akrobatického modelu a ten pripustil, že ho treba riadiť inak ako bol zvyknutý, ale neťažkal si, že by to bolo nanič, tak ako sa to (teraz) javí nám.
V každom prípade to rekreačným modelárom (ako sme my) nerieši situáciu, lebo pre nich je HOLD mód v tejto podobe nepoužiteľný a zostáva im len RATE mód, ktorý síce následky poryvu vetra na model ZMIERNI, však model po poryve vetra do pôvodnej polohy NEVRÁTI, tak ako ho do pôvodnej polohy VRÁTI náš AssOrx a tiež FY-30A či Guardian 2D/3D v režime Attitude Hold.
JohnRB je evidentne vynikajúci programátor, problém však je, že my (mior a ja) Céčko neovládame a tak sú pre nás niektoré časti kódu naozaj zapeklitým orieškom.
Cez to všetko si však myslím, že "pes bude zakopaný" práve vo Voide s názvom "compute_pid" (približne v strede programu). Netreba nič pridať, ale skôr odobrať premennú, ktorá akumuluje výchylku knipla (avšak netuším ktorá to je).
V AssOrxe nezískavame hodnotu gyro-efektu snímaním signálu z gyro-senzorov (lebo sa k nim nijako nepripájame), ale porovnávaním signálu PRED a ZA stabilizátorom RX3S. Rozdiel týchto signálov je vlastne mierne upravený signál z gyro-senzorov. Ten ďalej aj my upravujeme: Hysteréziou sa "zbavujeme" nepotrebných "omrviniek" (šum, či nepatrné (a tým pádom neškodné) pohyby modelu). Ďalej prebieha priemerovanie "pomalobežných" zmien, pričom "rýchlobežné" zmeny prechádzajú priamo bez priemerovania. To celé má za následok "kľudné" správanie sa modelu. Potom prebieha integrácia časti gyro-efektu v akumulátore gyro-efektu, pričom vyprázdňovanie akumulátora gyro-efektu je úmerné výchylke knipla. To má za následok tzv. "mäkké odpojenie" zamknutia polohy modelu. "Tvrdé odpojenie" zamknutia polohy modelu nám strašne vadilo pri inak vynikajúcom letovom stabilizátore FY-30A. Bližšie je to popísané v závere článku odkaz
Čo by sme ešte v Open Stabilizeri chceli zmeniť, je možnosť samostaného ovládania predného kolesa modelu (čiže treba dorobiť ďalší vstup a ďalší výstup), so všetkými "vychytávkami", ktoré sme zakomponovali do AssOrxu. Bližšie o tom v závere článku odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
K používaniu Attitude Hold:
Jasné, (s prepáčením) "obyčajný modelár" to asi používať nebude a akrobat&fajnšmeker tiež nie som (zaťaľ
). Asi máš pravdu, že väčšine modelárov postačí RATE mód, a vlastne tým druhým tiež - lebo musí ! Súhlasím tiež, že sa v HOLD móde musí riadiť model inak ako "normálne", ale na to sa dá zvyknúť a ... je to zase niečo nové! Zrejme to potvrdíš, keďže funkčného Holda máte v AssOrx-e dobre zvládnutého .... ale o toto mi v tejto diskusii nejde.
Preto sa snažím sa naštartovať vylepšenie Holdu práve v tomto projekte. Zaujímavý je hlavne týmto:
1/ Netreba robiť žiadne zásahy do hw, dostupný (a vééry lacný) hardvér stačí len presoftiť
.
2/ Projekt je dostatočne univerzálny
, softvér výborne adaptovateľný , samotná aplikácia pohodlne konfigurovateľná .
3/ Vývojové nástroje a samotný procesor sú dostatočne výkonné :),
4/ a hlavne - projekt je výborne rozbehnutý
. "Ťažká programátorská lopota" je skvelo zrealizovaná. Dalo by sa povedať, že projekt je prakticky dokončený.
K regulácii:
Myslím, že v zásade je regulátor resp. void compute_pid() napísaný správne - je to všeobecná PID-formula. Celá kvalita regulácie by mala byť riadená viac-menej len vhodným pomerom koeficientov zložiek P, I a D - v našom prípade sú to premenné kp, ki a kd. PID-formula by mala "pracovať" rovnako dobre bez ohľadu na zvolený stabilizačný mód, a v RATE móde aj evidentne pracuje. Rozdiel by mal byť len v hodnotách koeficientov zložiek P, I a D. V móde HOLD by mala byť P-zložka zvýšená a/alebo I-zložka znížená.
Zatiaľ sa v tom kóde zorientovávam - hľadám miesto, kde sa tie koificienty modifikujú v závislosti od zvoleného módu.
Viem že sa opakujem, ale stále sa mi nevidí, že všetky servá skôr-či-neskôr pomaly odpochodujú do max. výchyliek, a to bez ohľadu na to, či sa s modelom a páčkami hýbe alebo nie. To je asi jediné, čo Attitude Hold dehonestuje. Nemyslím že toto súvisí s regulačou formulou, lebo regulačná sľučka v zásade funguje (!), len sú tam niekde nejaké drifty (na snímačoch a/alebo páčkach).
Ešte mi napadlo - parametre stabilizátora by sa mali dať monitorovať po sériovej linke. Skúsim povoliť debug messages a uvidíme.

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Odpoviem ti neskôr.
Som chorý - pomerne ťažký priebeh.
Teraz nemám síl, ani tých psychických.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)