AssOrx verzia 5-3-5 a 4-3-4: softvér a použitie
Dokonca ani mail od nášho poľského kamaráta Bogdana na konci novembra, ktorý sa pýtal na verziu 4-3-4, ma „netrkol“.
Vsugeroval som si totiž, že softvér verzie 5-3-5 je už verejne k dispozícii a že Bogdan čaká len na verziu 4-3-4.
Avšak všetko je inak.
pripravil: Janko O.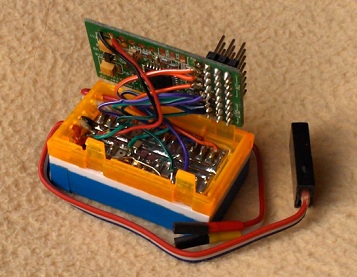 Od uvedenia (zverejnenia) verzie 3-3-3 už uplynulo takmer štvrť roka. A hoci krátko na to bol dokončený a viacero dní aj úspešne testovaný (univerzálny) softvér verzie 5-3-5, na jeho zverejnenie som akosi pozabudol. Hanbím sa a sypem si popol na hlavu.
Od uvedenia (zverejnenia) verzie 3-3-3 už uplynulo takmer štvrť roka. A hoci krátko na to bol dokončený a viacero dní aj úspešne testovaný (univerzálny) softvér verzie 5-3-5, na jeho zverejnenie som akosi pozabudol. Hanbím sa a sypem si popol na hlavu.









Mnohé vysvetlí moja odpoveď na Bogdanov mail:
Ahoj Bogdan.
Softvér pre verziu 5-3-5 je hotový. Tento softvér je univerzálny, takže sám rozozná, či máš samostatné servo pre riadenie predného kolesa a tiež či máš samostatne ovládané krídelká. Ak nie, tak sa prepne do režimu 4-3-4, či dokonca 3-3-3.
Cez to všetko zvažujeme úpravou (redukciou) kódu vytvoriť verziu 4-3-4.
Urobil som si zoznam modelov s prehľadom, aký softvér kam pôjde a vyšlo mi, že verziu 5-3-5 potrebujem len jednu, ale verziu 4-3-4 potrebujem do štyroch modelov. Do ďalších štyroch modelov verziu 2-3-2 (to sú modely s Delta krídlom), ktoré potrebujú stabilizovať len dva kanály. Tretí procesor by bol využitý na Elevon-mix.
Momentálne doma zavádzam FotoVoltaiku (pokiaľ nenapadne sneh), čo mi zaberá dosť veľa času, takže modelom sa venujem menej. Ale premýšľam nad tým stále.
Bogdan, maj sa dobre a Pozdrawiam.
Janko O.
A keďže, ako je spomínané v článku „Silvester 2013: polietanie na rozlúčku s rokom“, práce na mojej FotoVoltaike sa nateraz skončili ešte z tej strany Vianoc, tak z tejto strany Vianoc som sa opäť začal venovať práci na AssOrxe a modelárstvu vôbec.
V pláne sme mali úpravu (redukciu) kódu z verzie 5-3-5 na verziu 4-3-4. Ďalej sme začali pracovať na úprave softvéru tak, aby sa voľba režimu Normal, či Reverz (máme na mysli reverzáciu Gyro-efektu, nie reverzáciu výchyliek, daných pohybom riadiacej páky) nerobila výmenou softvéru, ale zmenou nastavenia v jednom (tom istom) softvéri.
Napokon sme sa z praktických dôvodov vrátili k pôvodnému riešeniu, ktoré sa nám javilo bezpečnejšie. Ale konkrétne:
-
Redukcia kódu z verzie 5-3-5 na verziu 4-3-4 (hoci už bola hotová) sa ukázala ako kontraproduktívna a eventuálnemu záujemcovi o stavbu by nepriniesla nič, okrem chaosu. Súčasná (a od októbra 2013 mnohokrát úspešne overená) verzia 5-3-5 je univerzálna a ako je spomínané v maile Bogdanovi, sama rozozná, či je v modeli samostatné servo pre riadenie predného kolesa a tiež či má model samostatne ovládané krídelká. Ak nie, tak sa prepne do režimu 4-3-4, či dokonca 3-3-3. Takto si záujemca o stavbu Stabilizačného systému stiahne verziu 5-3-5, bez ohľadu na to, že hardvér jeho AssOrx-u je vo verzii 5-3-5, 4-3-4, 3-3-3, či dokonca 2-3-2 (pre modely s Delta krídlom).
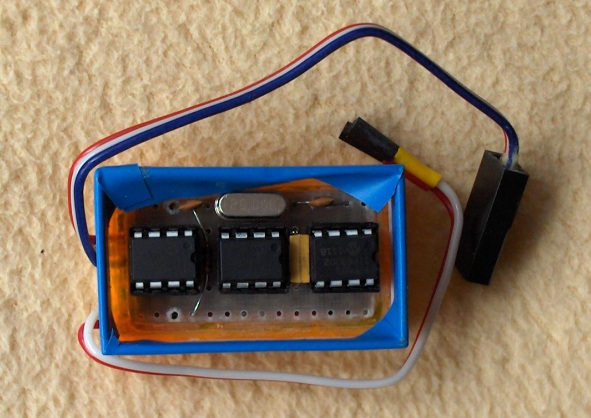
Toto je fotografia hardvéru 5-3-5. Pri hardvéri verzie 4-3-4 bude úplne vynechaný horný (červeno-bielo-modrý) káblik - výstup do serva riadenia predného kolesa. Dolný káblik bude len jednožilový - vstup pravého krídelka.
-
Po mnohých úvahách a takmer hotových úpravách softvéru sme sa vrátili k tomu, že Reverz Gyro-efektu bude riešený starým, ale bezpečným spôsobom: do mikrokontroléra sa nahrá softvér verzie Reverz. Viedlo nás k tomu viacero dôvodov, ale tie najzávažnejšie sú: na rozdiel od on-line prepínania Normal/Reverz nemôže za žiadnych okolností dôjsť k nechcenému prepnutiu reverzácie Gyro-efektu, čo má spravidla za následok haváriu modelu (viem o čom hovorím, zažil som to a experimentálny EasyStar NET len zázrakom skončil bez vážnejšej ujmy
 ). Našou stratégiou je: čo model, to (samostatný) prijímač, to (samostatný) telemetrický modul, to (samostatný) individuálne nastavený stabilizačný systém. Raz zakáblovaný model bezdôvodne nerozpájame. Jediné, čo sa mení - rozpája, je batéria. A basta! V prípade, že je treba AssOrx použiť do iného modelu, stačí z pätice vytiahnuť príslušný mikrokontrolér a zasunúť iný – reverzný. Väčšinou je to rýchlejšie, ako neohrabané a problémové nastavovanie pomocou zapínania pri vychýlených riadiacich pákach. Džampre neprichádzajú do úvahy z dôvodu nedostatku voľných vývodov uC a na viac-vývodové mikrokontroléry nechceme prejsť z dôvodu zachovania malých rozmerov.
). Našou stratégiou je: čo model, to (samostatný) prijímač, to (samostatný) telemetrický modul, to (samostatný) individuálne nastavený stabilizačný systém. Raz zakáblovaný model bezdôvodne nerozpájame. Jediné, čo sa mení - rozpája, je batéria. A basta! V prípade, že je treba AssOrx použiť do iného modelu, stačí z pätice vytiahnuť príslušný mikrokontrolér a zasunúť iný – reverzný. Väčšinou je to rýchlejšie, ako neohrabané a problémové nastavovanie pomocou zapínania pri vychýlených riadiacich pákach. Džampre neprichádzajú do úvahy z dôvodu nedostatku voľných vývodov uC a na viac-vývodové mikrokontroléry nechceme prejsť z dôvodu zachovania malých rozmerov.
Schéma signálovej časti verzie 4-3-4 je nasledovná (prípadne porovnajte s verziou 5-3-5 či 3-3-3):
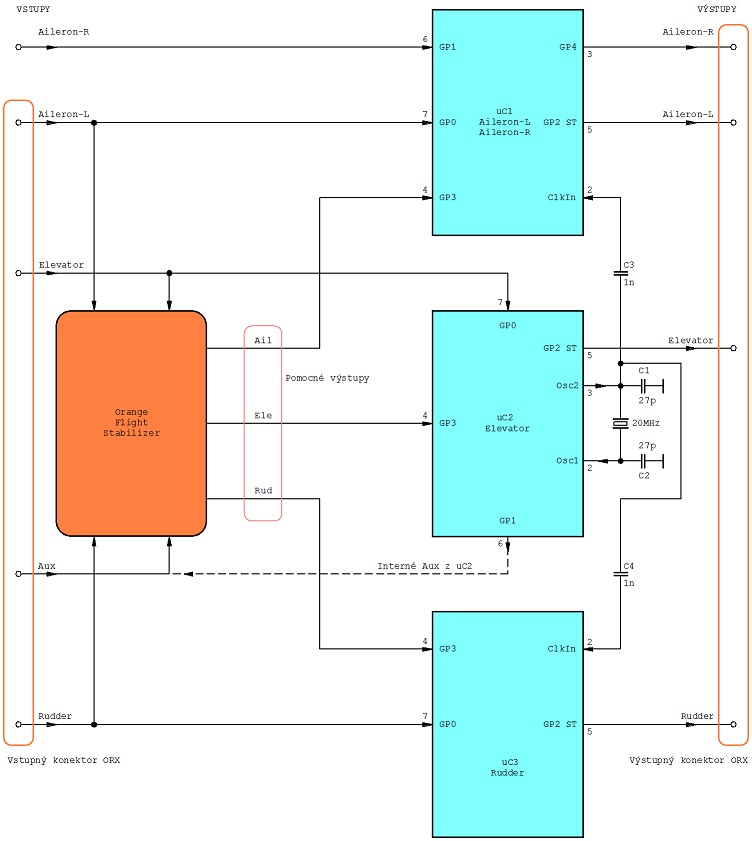
Schéma signálovej časti verzie 5-3-5 je uvedená v článku „AssOrx: schéma zapojenia - 1. časť“ a tu je aj popísané, ako postupovať pri prepájaní modulov (pôvodného Orange Flight stabilizera a nášho „Tres procesores“). Schéma signálovej časti verzie 3-3-3 je uvedená v článku „AssOrx verzia 3-3-3: softvér, vlastnosti, použitie“.
Schéma napájacej časti je v článku „AssOrx: schéma zapojenia - 2. časť“.
Zatiaľ čo vo verzii 3-3-3 sú použité tri rovnaké mikrokontroléry PIC12F629, v ktorých je napálený jeden (rovnaký) softvér, tak tieto vyššie verzie (5-3-5 a 4-3-4) sú riešené inak:
-
mikrokontrolér PIC12F629 je len jeden – (uC2) na výškovku (Elevator). V ňom je napálený program (hex súbor) s koncovkou Ele.
-
na krídelká (Aileron L+R) je použitý mikrokontrolér PIC12F683 (uC1). V ňom je napálený program (hex súbor) s koncovkou AilL+R.
-
na smerovku (Rudder) a riadenie predného kolesa (Steering) je opäť použitý mikrokontrolér PIC12F683 (uC3). V ňom je napálený program (hex súbor) s koncovkou RudSteer.
V prípade, že je správanie Gyro-efektu opačné, treba použiť príslušný súbor s označením Reverz. V sekcii Download alebo Tu je k dispozícii ZIP-súbor, ktorý teda obsahuje desať súborov: samostatný Normal (_N) a samostatný Reverz (_R) pre Výškovku (Ele). Pre Krídelká je to zložitejšie, pretože Normal alebo Reverz môže mať ľavé aj pravé krídelko (AilL+R). Možnosti sú teda štyri: _NN, _RN, _NR a _RR (vzhľadom na symetrické umiestnenie serv krídeliek, väčšinou pripadajú do úvahy verzie _NN a _RR). Štyri súbory sú z logických dôvodov k dispozícii aj pre Smerovku a Riadenie predného kolesa (RudSteer).
Za zmienku ešte stojí fakt, že softvér 5-3-5, hoci je univerzálny, tak má určité „priority“. Prioritné sú: Výškovka (Ele), ľavé Krídelko (Ail) a Smerovka (Rud). Pravé Krídelko (Ail-R) a Riadenie predného kolesa (Steer) sú druhotné. Z RC prijímača do AssOrxu teda MUSIA byť privedené signály Ail (ľavé krídelko), Ele a Rud (a samozrejme Aux). AssOrx sa bez nich nezaobíde. Signály Ail-R (pravé krídelko) a Steer privedené byť nemusia (ak nie sú samostatne ovládané).
Ak nie je na vstup AssOrxu privedený signál pravého krídelka, na výstupe Ail-R je rovnaký signál ako na výstupe ľavého krídelka (Ail-L). Nie je teda nutný Y-kábel na rozdelenie (jedného) signálu krídeliek do dvoch samostatných „krídelkových“ serv. A podobne: ak nie je na vstup AssOrxu privedený signál riadenia predného kolesa, tak je na výstupe Steer rovnaký signál, ako na výstupe Smerovky (Rudd).
Okrem toho je do kanálu riadenia predného kolesa (Steering) implementovaná nasledujúca funkcia: 20 sekúnd po odštartovaní modelu, presnejšie - keď už pilot prestane riadiť predné koleso, sa toto nastaví do svojej strednej polohy a prestane sa pohybovať. To bráni zbytočným (gyrom spôsobeným) pohybom serva riadenia predného podvozku, keď už je model vo vzduchu. Pri akomkoľvek zásahu do riadenia predného podvozku (napr. pri pristávaní) sa toto opäť aktivuje (a po 20 sekundách nečinnosti zas deaktivuje).
Prípadné dotazy či nejasnosti prosím napíšte do komentárov a my sa pokúsime uviesť veci na pravú mieru.
Problematika verzie 2-3-2 (alebo 2-Mix-2), určená pre modely s Delta krídlom, ovládané Elevonmi, bude predmetom samostatného článku.
Súvisiace články:
AssOrx: schéma zapojenia - 1. časť
AssOrx: schéma zapojenia - 2. časť
AssOrx verzia 3-3-3: softvér, vlastnosti, použitie
(Auto-)Stabilizačný Systém AssOrx pred skúškami
<Staršie | tento článok | Novšie>
Napísané: 6. 1. 2014, 11:14 | Prečítané: 8605x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 8
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
S DSM2 štandardom to asi fungovať nebude. Ale viem to len z modelárskych fór, sám som to neoveroval.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
1, neskusali ste flashnut nejaky alternativny FW, ako sa zmenili vlastnosti tohto gyra?
2, neuvazovali ste tieto vase algoritmy naprogramovat priamo do gyra?
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Čo sa týka implementácie našich algoritmov, to vidím ako určitý problém v tom, že alternatívny FW je napísaný v inom jazyku, ako pracujeme my.
Skôr by nás zaujímalo, kde sa stala chyba, že sa Ti robilo lietadlo.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Asi pol roka lietalo v pohode... kdesi som zachytil, ze s origos FW MUSI mat zapojene vsetky vstupy, co neviem, ci som mal...
Je mozne, ze zblblo servo v kridelku ( dvakrat svihlo po kridle dole a druhykrat uz to nerozdychalo), ale intuitivne skor podozrievam mile gyro. Mozno aj preto, ze na SU27 ( co je delta), som ho nemohol ani za svet rozbehat k uspokojivej funkcnosti. Ked sa konecne dostanem k tomu pytliku, dam vediet
Vzhladom na to, co teraz pacham
odkaz
skor uvazujem nad FC130, pripada mi tiez nie moc drahe a navyse ma HeadLock + na dialkove ovladanie mu staci trojpolohovy servosignal, co mi vyhovuje.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Vo všetkých článkoch, kde spomíname Orange Flight Stabilizer, sa to snažíme dosť zdôrazňovať.
Ale inak je bezproblémový a účinný.
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)