AssOrx: schéma zapojenia - 2. časť
Konkrétne schému napájania.
Zároveň dokončíme popis činnosti a v neposlednom rade sa začneme zoznamovať so správaním sa jedného jeho kanálu.
To je samozrejme dané činnosťou softvéru, ktorý je momentálne vo verzii 19.
autor: Janko O. Dnes prinášame druhú časť zapojenia nášho AssOrxu.
Dnes prinášame druhú časť zapojenia nášho AssOrxu.









Schéma zapojenia „signálovej“ časti AssOrxu sme priniesli minule. Ako vyzerá zapojenie napájacej časti, môžete vidieť na nasledujúcom obrázku:
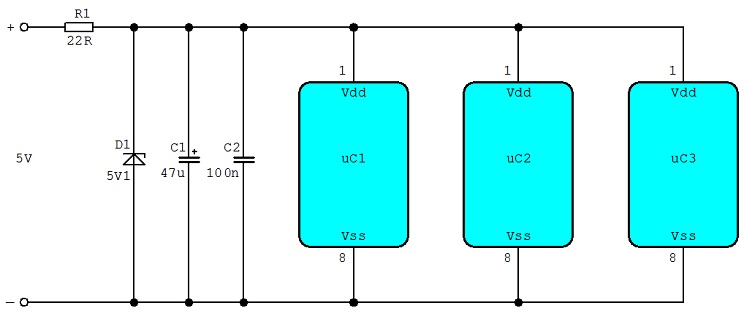
Plusová vetva napájania mikrokontrolérov je od obvodov Orange Flight Stabilizera oddelená odporom R1. Napájacie napätie mikrokontrolérov je (proti napäťovým špičkám) ošetrené kondenzátormi C1 a C2. Hodnota kondenzátora C1 môže byť aj väčšia, limitujúcim faktorom je samozrejme jeho rozmer.
Niektoré servá pri brzdení môžu spôsobiť krátkodobý nárast napájacieho napätia (motor serva vtedy funguje ako dynamo, či generátor). Aby nebola prekročená maximálna hodnota napájacieho napätia mikrokontrolérov PIC (5,5V), tak je v obvode použitá Zenerova dióda D1. Tá sa samozrejme uplatní aj v prípade, že palubná inštalácia je napájaná UBEC-om (SBEC-om), ktorých výstupné napätie býva aj (mierne nad) 6V.
Toto zapojenie však nie je odolné proti krátkodobým hlbokým poklesom napätia (pod 2V), čo môže spôsobiť reset mikrokontrolérov a ich následnú inicializáciu a kalibráciu, čo trvá niekoľko sekúnd. Po tú dobu by bol model samozrejme neovládateľný.
Túto skutočnosť môže aspoň čiastočne eliminovať toto zapojenie:
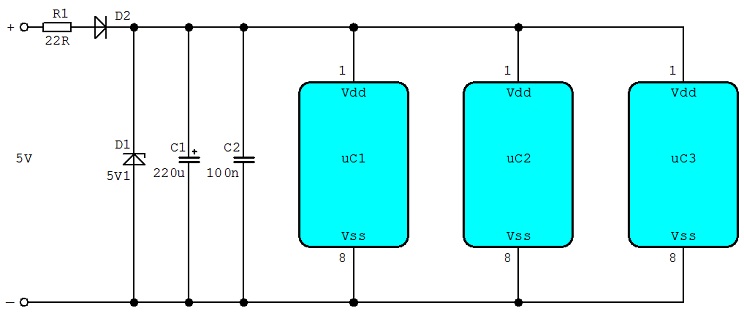
Tu je predchádzajúce zapojenie doplnené o diódu D2 (napr. Schottkyho dióda (nie je podmienkou), ktorá krátkodobo znesie prúd aspoň 200mA) a kondenzátor C1 by mal mať čo najväčšiu použiteľnú kapacitu. S výnimkou tejto súčiastky (ak má príliš vysokú kapacitu) môžu byť všetky ostatné vo vyhotovení SMD.
Napájacie napätie (5 Voltov) sa z doštičky Orange Flight Stabilizera získava podľa nasledujúceho obrázku:
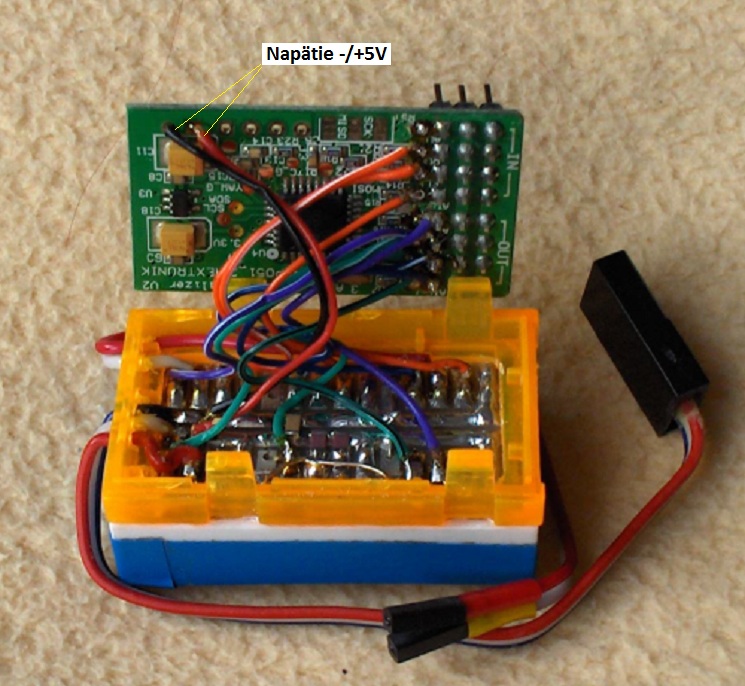
Strana spojov našej "DPS". Niektoré SMD súčiastky vidno, iné sú skryré pod kabelážou. Niekoľko súčiastok je z druhej strany DPS.
My sme „naše“ mikrokontroléry (a samozrejme aj ostatné k nim patriace súčiastky) umiestnili na kúsku univerzálneho plošného spoja, z čoho logicky vyplýva, že žiadny návrh DPS (DPS - Doska Plošného Spoja, po anglicky PCB) nemáme. Pre tých, čo našu web stránku sledujú podrobnejšie to nie je žiadne prekvapenie, pretože žiadnemu z nami vyvinutých zariadení (merače Ri troj- a šesť-článkových LiPol, obmedzovač napätia LiPol článkov, telemetria, ...) sme nenavrhli plošný spoj.
Táto naša stratégia je (okrem našej pohodlnosti  ) súčasne akýmsi „skúšobným kameňom“ pre prípadných záujemcov o stavbu našich zariadení. Myslíme si, že do stavby takýchto zariadení by sa nemali púšťať „elektronickí analfabeti“. A tí, čo „elektronickými analfabetmi“ nie sú, si plošný spoj navrhnú a vyrobia sami, prípadne to postavia na univerzálnu DPS, rovnako ako my.
) súčasne akýmsi „skúšobným kameňom“ pre prípadných záujemcov o stavbu našich zariadení. Myslíme si, že do stavby takýchto zariadení by sa nemali púšťať „elektronickí analfabeti“. A tí, čo „elektronickými analfabetmi“ nie sú, si plošný spoj navrhnú a vyrobia sami, prípadne to postavia na univerzálnu DPS, rovnako ako my.
Na schéme signálovej časti AssOrxu sme nevysvetlili význam „prerušovaného“ spojenia medzi vývodom GP1 procesora uC2 a vstupom Aux Orange Flight Stabilizera. Táto alternatíva je pre prípad, že náš RC prijímač (alebo aj vysielač) nemá dostatok voľných kanálov na to, aby sme mohli nezávisle zapínať (impulzy užšie ako 1200 mikrosekúnd) a vypínať (impulzy širšie ako 1400 mikrosekúnd) „gyrovanie“ Orange Flight Stabilizera. V tom prípade budú impulzy (o dĺžke „zapnuté“) prichádzať nie z RC prijímača, ale z vývodu GP1 procesora uC2. Ak by sme do vstupu Aux Orange Flight Stabilizera (verzie 2 a nižšej) nepriviedli žiadne impulzy, nastal by jav, ktorému sme s Miroslavom dali meno „mykádo“. Skrátka, servá by sebou divo mykali  .
.
My však v každom prípade odporúčame mať možnosť „gyrovanie“ AssOrxu diaľkovo (samostatným kanálom) ovládať.
Ako sa náš AssOrx správa, čo má spoločné s pôvodným Orange Flight Stabilizerom, v čom sa podobá na FY-30A či Guardian 2D/3D a v čom sa od nich odlišuje?
Samozrejme, vychádzali sme z vlastných dobrých skúseností s používaním gýr v modeloch lietadiel. Neskôr sme „gyro-efekt“ (zisk gýr) diaľkovo menili v závislosti od polohy riadiacich pák a vzniklo Dynamické riadenie gýr. Výrobcovia modelárskeho príslušenstva začali jednotlivé gyrá „integrovať“ do jedného zariadenia a vznikli 3-axis Flight Stabilizery, ako napríklad náš obľúbený Orange Flight Stabilizer. Žiaľ, diaľkové (plynulé) ovládanie „gyro-efektu“ väčšinou nemajú a samostane, pre každú os, už vôbec nie. A tak tu naše Dynamické riadenie nemalo šancu, čo sme chápali ako krok späť.
Neskôr sa objavili Autostabilizačné systémy ako FY-30A a Guardian 2D/3D (a samozrejme aj iné), ktoré síce stabilitu modelov posunuli na vyššiu úroveň (použitím systému absolútnej stabilizácie - 3D mód) a boli pre nás spočiatku vzorom, avšak ani ony nemali dynamické riadenie stabilizačného účinku a navyše sa u nich objavili nové (pre nás dovtedy neznáme) „necnosti“. Napr. pri miernom vychýlení riadiacej páky zo stredovej polohy systém vypol režim „absolútnej“ stabilizácie a zostal len režim „relatívnej“ stabilizácie (klasické „gyrovanie“). Pritom však model sebou neprirodzene trhol a v podstate skokom mierne zmenil trajektóriu letu (či už smerovo ale bohužiaľ aj výškovo).
Okrem toho, ani Orange Flight Stabilizer a ani FY-30A nemajú možnosť samostatného (a pritom „gyrovaného“) ovládania krídeliek (Guardian 2D/3D to má) a o samostatnom „gyrovanom“ ovládaní predného kolesa (nezávisle od smerovky) ani nesnívajú. Ale my s Miroslavom sme o tom stále snívali. A tak bolo jasné, že s tým treba niečo urobiť.
Orange Flight Stabilizer sme zvolili ako základ pre jeho mnohé veľmi dobré vlastnosti (relatívne malé „kvantovanie“, nízka cena, na rozdiel od mnohých iných je „zapúzdrený“ v pre AssOrx využiteľnej krabičke, …). Má však jednu nepríjemnú necnosť: jemné chvenie serv a to aj vtedy, keď je „gyrovanie“ vypnuté. Toto bola prvá úloha, ktorú bolo treba vyriešiť: chvenie softvérovo odstrániť, bez citeľného negatívneho dopadu na latenciu, presnosť a jemnosť „gyrovania“. Podarilo sa, AssOrx nechveje, drží ako pribitý.
Dynamické riadenie je interné, bez potreby samostatného ovládacieho kanálu. A samozrejme pre každú os samostatné, nezávislé. 100-stupňová Dynamika gyrovania je neustále vypočítavaná z aktuálnej polohy tej-ktorej riadiacej páky a jej stredovej polohy. Tá je zistená tesne po zapnutí v procese kalibrácie. Preto niekoľko sekúnd po zapnutí musia byť riadiace páky v neutrále a model v absolútnom kľude.
Dynamika ovplyvňuje aj ďalšiu činnosť AssOrxu, ktorá bude spomenutá neskôr (v ďalšej časti).
Súvisiace články:
AssOrx: schéma zapojenia - 1. časť
(Auto-)Stabilizačný Systém AssOrx pred skúškami
Dynamické riadenie gýr v modeloch lietadiel
Použitie gýr v modeloch lietadiel - 2.časť
Použitie gýr v modeloch lietadiel - 1.časť
Zisťovanie vlastností gýr – 3. časť
Zisťovanie vlastností gýr – 2. časť
Zisťovanie vlastností gýr – 1. časť
<Staršie | tento článok | Novšie>
Napísané: 29. 9. 2013, 16:36 | Prečítané: 11482x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)