AssOrx: schéma zapojenia - 1. časť
Z nej je zrejmé, ako sú Orange Flight Stabilizer a jednotlivé mikrokontroléry prepojené.
No a dnes s tým začneme a súčasne sa pokúsime aj o jednoduché vysvetlenie činnosti.
Autor: Janko O. V komentároch k článku „AssOrx: koniec prázdnin“ sme Imrovi (ktorý sa mimochodom v problematike veľmi dobre vyzná) sľúbili, že v nasledujúcej časti bude uverejnená schéma zapojenia.
V komentároch k článku „AssOrx: koniec prázdnin“ sme Imrovi (ktorý sa mimochodom v problematike veľmi dobre vyzná) sľúbili, že v nasledujúcej časti bude uverejnená schéma zapojenia.









Pre lepšiu prehľadnosť zapojenia sme urobili schémy dve: prvá, hlavná schéma ukazuje „signálové“ cesty (signálmi rozumieme kanálové impulzy) v AssOrxe. Druhá, jednoduchšia schéma (v budúcej časti) ukáže napájanie „našej“ prídavnej doštičky.
Schéma „signálového“ prepojenia najzložitejšej verzie AssOrxu, verzie 5-3-5:
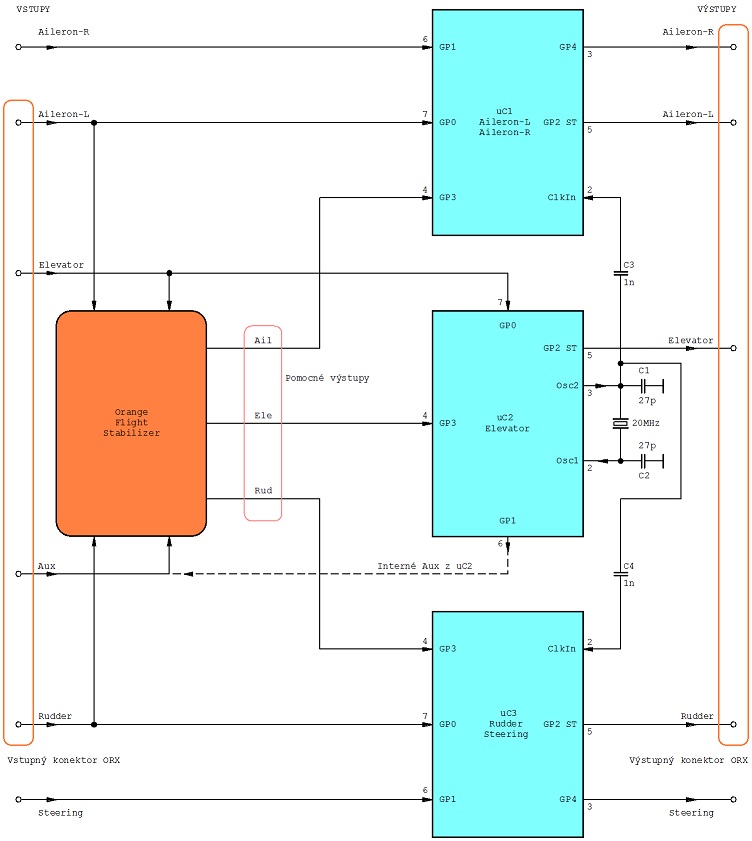
Schéma zapojenia signálovej časti AssOrxu verzie 5-3-5.
Vo verzii 4-3-4 (bez (samostatným kanálom) riadeného predného kolesa (Steering)) nie je nutné nič pripájať na piny GP1 a GP4 procesoru uC3.
Vo verzii 3-3-3 (bez (samostatným kanálom) riadeného predného kolesa aj bez (samostatným kanálom) riadeného pravého krídielka (obe krídielká sú riadené spoločne cez Y-kábel)) nie je nutné nič pripájať ani na piny GP1 a GP4 procesoru uC1.
Na ľavej strane sú vstupy AssOrxu, na pravej výstupy AssOrxu. Pomocou šípok sme naznačili smerovanie signálov.
Začneme netypicky: taktovaním procesorov. V prvej verzii „Tres procesores“ bol každý mikrokontrolér taktovaný nezávisle, takže pri troch procesoroch boli tri kryštály a šesť kondenzátorov (SMD 27pF). Neskôr sa nám to začalo javiť ako mrhanie materiálom a urobili sme minimalizáciu: taktovaciu frekvenciu 20MHz „vyrába“ len prostredný procesor (Elevator) a cez kondenzátory C3 a C4 ju dodáva aj ostatným dvom, ktoré sú v režime „external oscilator“.
Tým sme ušetrili dva kryštály a dva kondenzátory, ale hlavne sme dosiahli to, že všetky tri procesory pracujú synchrónne. Súčasne sme však čiastočne obmedzili Imrom spomínanú možnosť, že keď sa odpáli jeden z procesorov, ostatné dva pracujú ďalej. Pretože keď sa odpáli ten prostredný (Elevator), tak ďalej už nepracuje vôbec nič. Tu sa teda črtá možnosť teoretického zvýšenia spoľahlivosti AssOrxu nechať procesory taktovať samostatne a nezávisle, tak ako je to spomínané na začiatku odstavca. Ale touto cestou my asi nepôjdeme.
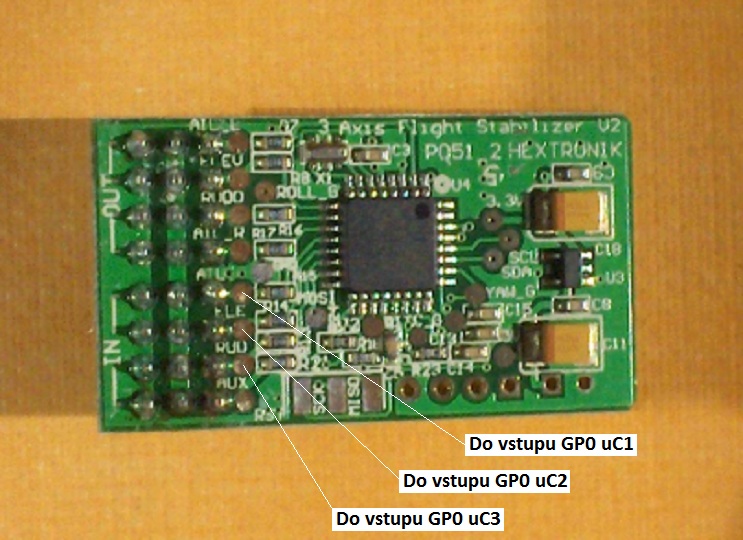
Do Orange Flight Stabilizera sú cez servo-konektory z RC prijímača privádzané kanálové impulzy Aux (zapínanie a vypínanie „gyrovania“), Ail (krídielká), Ele (výškovka) a Rud (smerovka). Okrem signálu (kanálových impulzov) Aux sú tieto signály, teda Ail, Ele a Rud súčasne privádzané aj na vstupy (GP0) jednotlivých procesorov.
Ako? Jednoducho sme na signálové piny vstupných konektorov Orange Flight Stabilizera prispájkovali tenké (lankové) rôznofarebné vodiče (viď obrázky v tomto článku), ktorých opačné konce boli privedené na vstupy (GP0) jednotlivých procesorov .
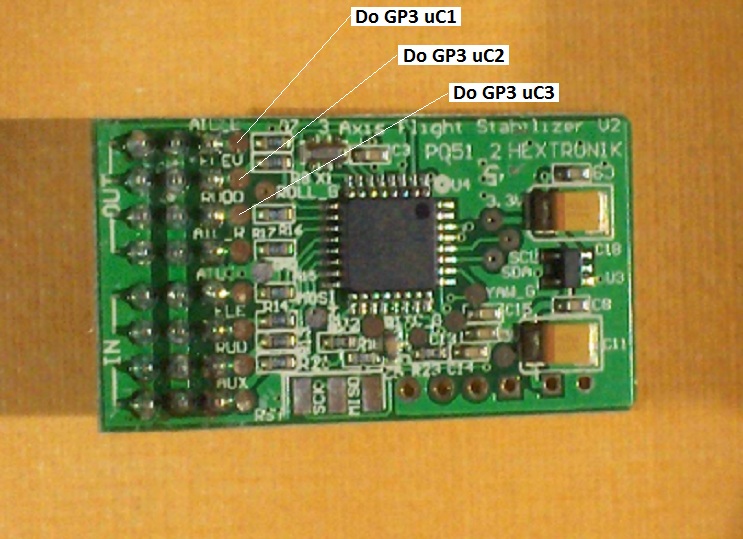
Pôvodné výstupy Orange Flight Stabilizera do serv: Ail (krídielká), Ele (výškovka) a Rud (smerovka) už nie sú pripojené na výstupné servo-konektory (preto musia byť pôvodné spoje prerušené),

Označené kratučké spoje treba prerušiť (napr. preškrabnúť nožom alebo ihlovým pilníkom).
ale sú vedené na vstupy (GP3) jednotlivých procesorov (na schéme (uprostred) označené ako Pomocné výstupy).
Pomocné výstupy.
Z týchto signálov a zo vstupných signálov stabilizačného zariadenia jednotlivé procesory vyselektujú cennú veličinu, ktorej sme dali meno: Gyro-Efekt. Táto veličina je v pôvodnej podobe Orange Flight Stabilizera ovplyvňovaná (nastaviteľná) trimrami, označenými: Roll (účinnosť „gyrovania“ krídeliek), Pitch (účinnosť „gyrovania“ výškovky) a Yaw (účinnosť „gyrovania“ smerovky).
Keďže v našom procesore je Gyro-Efekt ďalej spracovávaný a nastavovaný v podobe derivovanej (D, a použili sme aj výraz relatívna stabilizácia – R) a integráciou je získaná hodnota proporcionálna (P, a použili sme aj výraz absolútna stabilizácia – A), tak aby sa nám tieto dve nastavenia „nebili“, trimre nastavíme do vopred definovanej polohy: opatrne ich vytočíme úplne na minimum (doľava) a potom presne o 180 stupňov doprava. Nastavovacie drážky trimrov by tak mali s osou Orange Flight Stabilizera zvierať uhol 45 stupňov.
Netvrdíme, že neskôr nie je možné s nastavením trimrov mierne hýbať, ale toto je východzie nastavenie, od ktorého sa odvíja činnosť softvéru mikrokontroléra (PIC).
Signály (kanálové impulzy) do serv sú vedené z pinov GP2 ST jednotlivých mikrokontrolérov.
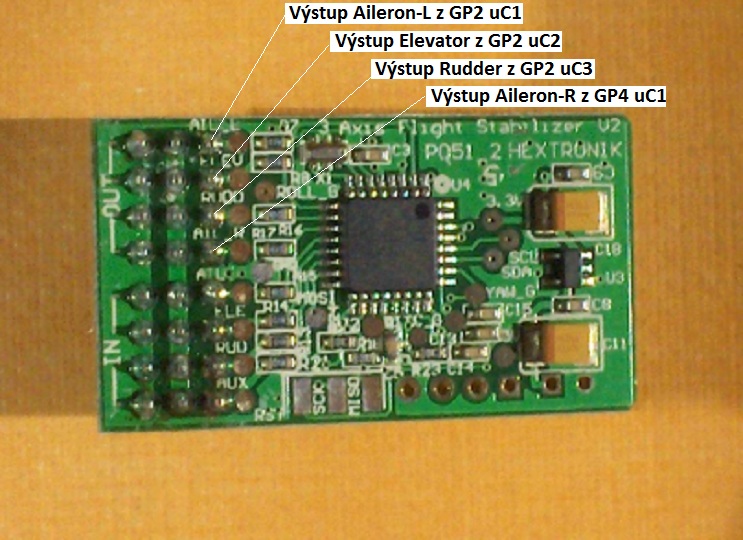
Úmyselne sme zdôraznili označenie GP2 ST, pričom ST znamená Schmitt Triger input. Ak vás zaujíma, prečo nás to trápi, tak vedzte, že ak sa GP2 ST použije ako vstup kanálových impulzov z RC prijímača (alebo z Orange Flight Stabilizera), ktorý má svoj procesor napájaný napätím 3,3V (ako že to tak má asi väčšina modelárskych procesorových zariadení), tak nastanú problémy. Náš procesor (PIC) je napájaný napätím približne 5V, avšak rozhodovacia úroveň jeho GP2 ST vstupu je okolo 3,3V. Keďže amplitúda kanálových impulzov z RC prijímača (a z Orange Flight Stabilizera) sa nachádza práve na tejto hranici, ich spracovanie Schmitt Triger vstupom môže byť (a aj je) nespoľahlivé. Preto tento pin MUSÍ byť pre naše použitie nastavený len ako výstup. Ostatné vstupy mikrokontroléra sú v režime TTL a spracovanie 3,3-Voltových impulzov z prijímača (a z Orange Flight Stabilizera) je bezproblémové.
Amplitúda kanálových impulzov, vychádzajúcich z nášho mikrokontroléra (PIC) do serv, je takmer +5V.
Súvisiace články:
<Staršie | tento článok | Novšie>
Napísané: 22. 9. 2013, 17:56 | Prečítané: 10814x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)