AssOrx: koniec prázdnin
Na tom by nebolo nič čudné ani zriedkavé, ale toto bol mail z Poľska.
Bogdan z Lodže sa zaujíma o náš (Auto) stabilizačný systém a okrem toho, že nás jeho mail potešil, tak nás súčasne aj prebral z (po)letného „elektronického“ ničnerobenia.
autor: Janko O.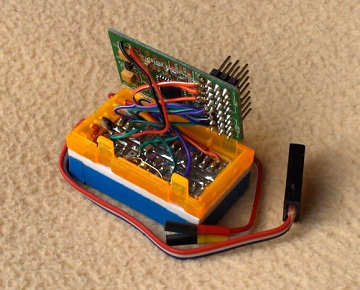 Vo štvrtok (12.9.2013) sme na adresu rcmodely@cevaro.sk dostali mail od verného návštevníka našej Web stránky.
Vo štvrtok (12.9.2013) sme na adresu rcmodely@cevaro.sk dostali mail od verného návštevníka našej Web stránky.









Keďže si myslíme, že to čo zaujíma Bogdana, by mohlo zaujímať aj ďalších modelárov, rozhodli sme sa, že našu mailovú korešpondenciu zverejníme.
Vo svojom maile Bogdan píše:
Od dwóch lat z zainteresowaniem czytam wasze informacje na temat elektroniki w modelarstwie. Artykuł "(Auto-)Stabilizačný Systém AssOrx pred skúškami" spowodował, że kupiłem ten stabilizator. Interesuje mnie, czy mógłbym dostać więcej informacji na temat tej rozbudowy (ew. schematy, opisy). Czy mógłbym otrzymać informację na mój mail adres.
Pozdrawiam i czekam na dalsze wspaniałe opracowania.
Robicie dobrą robotę.
Pozdrawiam.
Hneď druhý deň, keď som mal trochu času, som Bogdanovi odpovedal. Niektoré informácie, ktoré som mu poskytol, sú nové a ešte sme ich nespomínali:
Ahoj (Pozdrawiam).
Články o ASS - (Auto-)Stabilizačný Systém AssOrx na našej web stránke budú pokračovať.
Teraz v lete sme sa venovali opravám, rekonštrukcii a modernizácii našich starších modelov a stavbe úplne nových modelov. A na elektroniku sme akosi nemali čas. Avšak s príchodom zlého počasia sa budeme opäť venovať elektronike.
Hardvérová časť ASS AssOrx je vlastne hotová, nemenná. Je jednoduchá:
Orange Flight Stabilizer a k tomu naša elektronika: 3 mikrokontroléry (procesory) PIC12F629 alebo PIC12F683 a kryštál 20MHz (a asi 3 SMD kondenzátory, jeden SMD rezistor a jedna Zenerova dióda). Tri procesory sú preto, že každý samostatne spracováva signál jedného kanálu pred a za Flight Stabilizerom. Jeden spoločný väčší mikrokontrolér sa nám neosvedčil, pretože nebol schopný s dostatočnou jemnosťou (presnosťou na mikrosekundy) spracovať 6 signálov.
AssOrx môže byť vo viacerých modifikáciách (333, 434, 535, alebo aj 222), podľa toho, koľko má vstupov, koľko gyrokanálov a koľko výstupov. Napr. 333 znamená: 3 vstupy (Ailerons, Elevator, Rudder), 3 gyrokanály Orange Flight Stabilizera a 3 výstupy (Ailerons, Elevator, Rudder).
Systém 535 znamená: 5 vstupov (Aileron L, Aileron R, Elevator, Rudder, Steering predného kolesa modelu), 3 gyrokanály Orange Flight Stabilizera a 5 výstupov (Aileron L, Aileron R, Elevator, Rudder, Steering predného kolesa modelu).
Toto všetko a samozrejme aj ďalšie informácie budú postupne obsahom ďalších pokračovaní článkov o AssOrxe, ktoré pripravujeme.
Ešte teraz v lete sme pracovali aj na softvéri pre náš AssOrx. S bratom Miroslavom (mior) sme praktickými skúškami dospeli k záveru, že na stabilizačných systémoch Guardian 2D/3D a FY-30A nám vadí niekoľko vecí:
že nemajú dynamické riadenie gyroefektu a že majú pevne nastavené pásmo absotútnej stabilizácie (tzv. HeadLock). To má za následok, že pri pohybe knipla na RC vysielači sebou model neprirodzene trhne.
Toto v našom softvéri riešime tak, že samozrejme máme dynamické riadenie gyroefektu a navyše pásmo absolútnej stabilizácie je riadené tiež dynamicky, takže pri pohybe knipla sebou model netrhne.
Ak máš záujem o stavbu nášho AssOrxu, tak ťa prosíme: nejaký čas vydrž, až vyjdú spomínané články a medzitým si možno zožeň veci, ktoré na to budeš potrebovať. Programátor PIC mikrokontrolérov a samozrejme si budeš musieť urobiť aj hardvérovú časť AssOrxu, teda doštičku s tromi mikrokontrolérmi a s prepojením s obvodmi Orange Flight Stabilizera.
Ak by si mal mimoriadny záujem a si nedočkavý, tak ti môžeme (mailom) poskytnúť podklady pre zhotovenie hardvérovej časti AssOrxu a súčasnú verziu softvéru pre mikrokontroléry. Pozor: každý z trojice mikrokontrolérov má trochu iný softvér.
Ak máš záujem sa dozvedieť niečo viac, ozvi sa, bez problémov ti odpovieme.
S pozdravom (Pozdrawiam)
Janko O.
Ešte v ten deň Bogdan odpovedal a to nás mimo iné „naštartovalo“ aj k napísaniu tohto článku.
Witaj
Dziękuję za obszerne wyjaśnienie i informacje na interesujący mnie temat.
Z niecierpliwością będę oczekiwać na dalsze artykuły na temat budowy tego stabilizatora.
Jestem zainteresowany jego budową.
Jeszcze raz dziękuję za odpowiedz i pozdrawiam.
P.S. Ja nie mam problemu z czytaniem w słowackim języku.
Pozdrawiam. Bogdan
Na oplátku musím Bogdanovi povedať, že ani my nemáme problém s čítaním v poľskom jazyku. Nepoužili sme žiadny (ani Google-) prekladač a myslím, že sme hneď porozumeli jeho mailom a každému slovu v ňom (možno aj preto, že sme 6 rokov bývali v Ostrave (a Miroslav sa tam dokonca narodil)). Holt, tá slovanská vzájomnosť má niečo do seba.
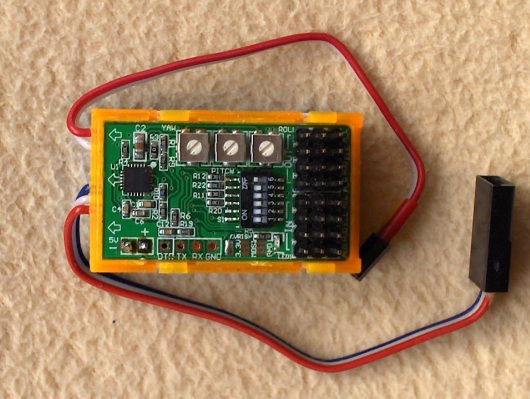
Okrem toho, čo sme napísali Bogdanovi, by sme dnes chceli zverejniť alebo doplniť aj ďalšie informácie o AssOrxe, ale aj o samotnom Orange Flight Stabilizeri.
V časopise "RC revue" č. 4/2013 v závere článku "Stabilizační systémy pro modely letadel" autor Ing. Michal Černý na str. 27 na adresu Orange Flight Stabilizera píše:
„... Pro náročnější aplikace ale vhodný není kvůli malému rozlišení poloh serv a drobnému chvění a zákmitům, které na servech způsobuje, a to dokonce při vypnuté stabilizaci.“
To, čo autor článku píše, je pravda. Aj naše skúsenosti s malým rozlíšením polôh (my sme tomu už dávnejšie dali názov „kvantovanie“) nás primäli k už spomínanému opatreniu, že namiesto jedného mikrokontroléra pre všetky tri kanály AssOrxu používame na každý kanál (každú os) stabilizačného systému samostatný procesor (a tak vzniklo familárne označenie „Tres Procesores“).
"Tres proserores" v maximálnej verzii 5-3-5
Tak sa nám podarilo dosiahnuť „jemnosť“ spracovania signálu (kvantovanie) s presnosťou na 2 mikrosekundy. Táto hodnota je väčšinou hlboko pod (alebo v najhoršom na úrovni) jemnosťou (kvanovaním) spracovania signálu bežných modelárskych serv, ktoré pre svoje rekreačné účely používame. Ako sú na tom niektoré bežné servá, je spomínané v článku „Presnosť, citlivosť, alebo pásmo necitlivosti modelárskych serv“, takže posúďte sami.
V priebehu leta sme (aj na základe spomínaného článku Ing. Michala Černého) upravili softvér pre AssOrx tak, aby signál z RC prijímača, či už je ovplyvňovaný gyro-signálom alebo nie, bol vždy v najjemnejšom rozlíšení, ktoré môžeme dosiahnuť, teda 2 mikrosekundy. Tým sme tak trochu eliminovali obavy Ing. Michala Černého z malého rozlíšenia polôh serv. Súčasne ale tvrdíme, že maše modely sú rekreačné a do sfér náročnejších aplikácií asi nezasahujú.
Vstupy pre Aileron-R a Steering (riadenie predného kolesa) sú červený a biely káblik so samostanými konektormi (na obrázku hore), ktoré sa zapoja do príslušných servokonektorov RC prijímača.
Výstup pre Aileron-R je zaintegrovaný v Orange Flight Stabilizeri. Výstup Steering je samostatný káblik s konektorom (na obrázku dole vpravo).
Jeho informácia o malom rozlíšení polôh serv stabilizačného systému Orange Flight Stabilizer nás ale naplnila zvedavosťou, ako sú na tom iné stabilizačné systémy. Meraniam sme podrobili už spomínané (drahšie a pre nás do tej doby vzorové) FY-30A a Guardian 2D/3D a potom aj lacnejšie zariadenia: i86AP, i86 a tiež tento z HiModelu: JCX-M6.
A aký je záver? Verte alebo neverte, ale Orange Flight Stabilizer dopadol so svojim cca 5 až 8 (typicky 6) mikrosekundovým kvantovaním najlepšie. Ostatné systémy mali kvantovanie okolo15 až 20 mikrosekúnd a niektoré až 30 mikrosekúnd a viac. Podľa nášho názoru sú kvantovanie a chvenie v určitom logickom vzťahu: keďže väčšina týchto systémov používa v podstate rovnaký 3-osý gyroskopický čip, tak softvérovým spracovaním sa dá jeden parameter vylepšiť na úkor druhého a naopak.
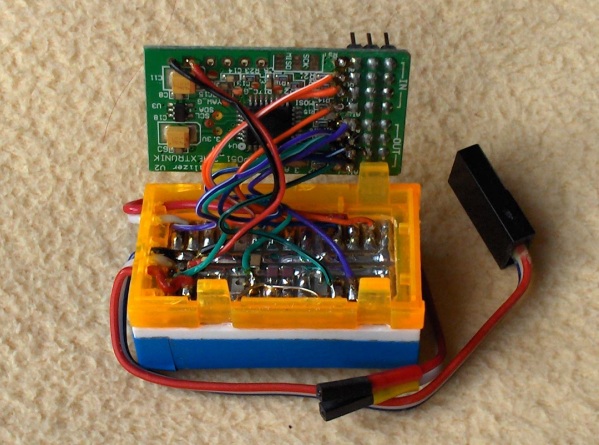
Prepojenie obvodov Orange Flight Stabilizera s našou prídavnou elektronikou.
Keďže sme doteraz Orange Flight Stabilizer viac-menej len chválili, tak treba uviesť aj nedostatky:
Na margo chvenia a zákmitov u systému Orange Flight Stabilizer treba upozorniť, že v každom prípade MUSIA byť do vstupu zariadenia pripojené všetky 3 signály (kanály): Aileron, Elevator, Rudder a tiež „zapínací/vypínací“ signál Aux. Hoci máte model, ktorý má len Krídielká a Výškovku (alebo Smerovku a Výškovku, prípadne Delta-model s dvomi Elevonmi), v každom prípade zapojte aj tretí kanál. V opačnom prípade budú mať servá oveľa väčšie chvenie a zákmity.

Toto je verzia 5-3-5. Verzia 3-3-3 (alebo 2-2-2) prídavné kábliky a konektory nepotrebuje.
Ďalším veľkým nedostatkom je, že pri prepnutí zmyslu Gyro-Efektu z Normal na Reverse sa reverzuje nie len Gyro-Efekt, ale aj výchylky serva. Toto treba riešiť prepnutím reverzov vo vysielači. Nemá to logiku, ale ako sa hovorí: „Nikto nie je dokonalý“.
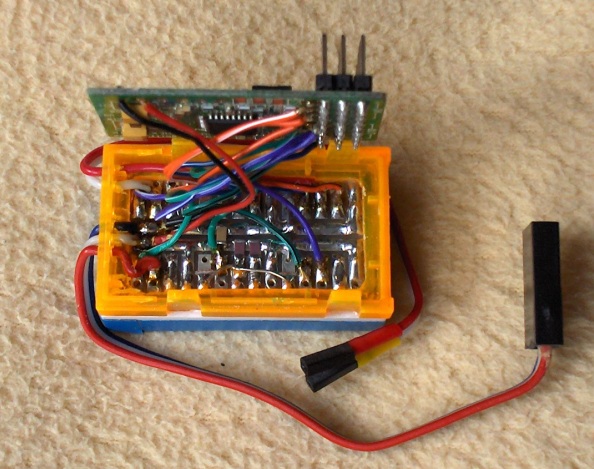
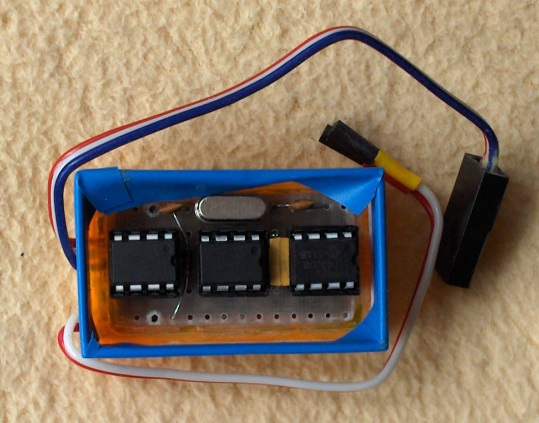
Pohľad na univerzálny plošný spoj prídavnej elektroniky. Kombinované použitie SMD súčiastok s klasickými "vývodovými".
Obzvlášť si treba dať pozor pri experimentovaní: napr. keď raz letíte s „holým“ modelom – bez Orange Flight Stabilizera a potom ho do modelu vložíte a zapojíte. Viem o čom hovorím, takto som havaroval s Easy Starom NET, keď som doňho namiesto Orange vložil iný stabilizačný systém, ktorý túto necnosť nemá.
Súvisiace články:
Presnosť, citlivosť, alebo pásmo necitlivosti modelárskych serv
(Auto-)Stabilizačný Systém AssOrx pred skúškami
<Staršie | tento článok | Novšie>
Napísané: 15. 9. 2013, 10:44 | Prečítané: 11193x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 5
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
napad s dedikovanymi procesormi na kazdu os mi pride velmi vtipny - v pozitivnom slova zmysle. Problematiku iste nemam ani zdaleka tak nastudovanu ako Vy, ale toto som zatial nevidel, takze Vam pisem prvotinu :) Vykon a presnost (ak som dobre rozumel vasmu terminu 'kvantovanie') sa sice daju prebit rychlejsim procesorom, ale to fyzicke rozdelenie moze prist vhod napr. ked nieco vyhori - minimalne clovek nestrati vseky kanaly naraz. Aj ked teraz hovorime o zdielanych komponentoch (gyro, original atmel?!), toto riesenie by sa asi dalo do buducna krasne rozdelit na kazdy kanal separatne. Naozaj elegantne.
Rad by som sa ale spytal na princip riesenia - studoval som aj obrazky aj text, ale nie som si isty, co je vlastne vstup do PIC-ov (v oboch pripadoch predpokladam, ze posledny komponent pred servami su PIC-y):
1) (postprocessing) vstup z vysielacky + vystup z Atmel-u
2) (atmel odstaveny) vstup z vysielacky + vystup z gyra
Z obrazkov (ako su zapojene kable, aj fakt, ze Atmel je stale tam kde bol povodne) mi to vychadza skor na #1, co by ale znamenalo, ze musite merat hned dva casovo citlive vstupy (PWM vstup aj vystup atmel-u) a odhadnut(?)/prepocitat hodnoty merane gyrom. Tu sa dokonca moze scitavat chyba 'kvantovania' atmelu aj PIC-ov; nehovoriac o pridanej latencii, kedze za vystup atmelu sa zaradi dalsi PIC
#2 by mi prislo optimalnejsie, hoci obrazky tomu nenasvedcuju - hodnoty by boli z 'prvej ruky' aj pocitanie by ste mali plne v rukach. Navyse povodny atmel by sa dal vyuzit na jeden kanal a bolo by treba uz len dva dalsie procesory.
dakujem
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Ako môžeš postrehnúť v niektorých predchádzajúcich článkov (predposledný obrázok v tomto článku: odkaz a prvý obrázok v tomto článku: odkaz ), tak pôvodný zámer bol použiť jeden procesor pre všetky (3) "gyrované" osi.
Po zistení, že "tadiaľto lacná a jednoduchá cesta nevedie" sme urobili "z núdze cnosť" a rozhodli sa pre tri samostatné procesory. Niektoré možnosti nám to zahatalo, iné zase otvorilo. Ale podstatné je, že sme takto mohli použiť úplne bežné, lacné, dostupné a ľahko programovateľné mikrokontroléry.
Schéma zapojenia bude uverejnená v ďalšom pokračovaní série o AssOrx-e. Z nej bude patrné, ako je to naozaj zapojené.
Je to tak, ako ty označuješ, že 1). Čiže: PIC meria impulzy pred (na vstupe) Orange Flight Stabilizerom, impulzy na jeho výstupe, z toho zistí polaritu a veľkosť "Gyro Efektu", s ním urobí "čoro-moro" (namixuje ten správny koktail nami vyrobenej "P" a "D" zložky, alebo inak: pomer zložky zaisťujúcej absolútnu a relatívnu polohu modelu) a vygeneruje výstupný impulz, určený pre servo.
Áno, tu sa naozaj sčítavajú chyby kvantovania Atmelu aj PICu a zrejme aj mierne narastie latencia, ale:
- kvantovanie riadiceho impulzu robí PIC s presnosťou na 2 mikrosekundy. Čo je minimálne 3-krát lepšie, ako to robí samotný Orange Flight Stabilizer.
- sčítavanie chýb (nepresností) kvantovania nastáva len pri korigovaní letu "gyrovaním" a to je už samo o sebe len "približné".
- rozdelením "polarity" Gyro Efektu a aj s ním súvisiacich zložiek (A a R) na kladné a záporné zložky a ich odčítaním pred generovaním servoimpulzu sme v ďalšej (v súčasnosti asi jedenástej) verzii softvéru dosiahli aspoň čiastočnú elimináciu chýb a nepresností.
- mierny nárast latencie neriešime, nemáme modely, kde by to prekážalo.
Metódou 2) sme nechceli ísť, pretože pôvodný Atmel (ktorý asi aj tak nedokážeme preprogramovať a použiť na iné účely) za nás urobí tzv. "špinavú robotu": pomocou I2C z "Gyro-čipu" načíta kalibračné konštanty, hodnoty rotačných zrýchlení a vypočíta z nich "Gyro Efekt", ktorý síce pridá ku vstupnému signálu, ale my ho vyššie spomínaným spôsobom vieme vyselektovať späť a získať v relatívne "čistej" podobe. Na nás potom zostala tá "čistá" a zábavná práca, kedy už len "čarujeme" so vstuným signálom a vhodne žonglujeme s derivovanými a integrovanými podobami Gyro Efektu.
Áno, má to aj nevýhody, ale nie, ďakujem. Ak by som mal riešiť aj tie (pre mňa) nezáživné veci, tak by som sa na to asi vykašľal a radšej nerobil nič. Toto je môj koníček (hobby), tu chcem robiť to, čo ma baví a nie to čo musím a čo ma nebaví (s desom v duši spomínam na spôsob, ako sa z tlakového senzora Bosch BMP085 získava hodnota tlaku. Polovicu PICu mi zaberie program na jeho výpočet z kalibračných konštánt a jeho nenormálne komplikovaný spôsob výpočtu. Čo ma tým výrobca otravuje? To mal predsa urobiť on. Po zapnutí napájania mali vnútorné štruktúry senzora načítať kalibračné konštanty, vykonať výpočet tlaku a na požiadanie ho odoslať užívateľovi. Toto ma definívne odradilo. FreeScale to robí oveľa lepšie.).
Ale vôbec by som sa nehneval, keby sa do niečoho podobného pustil aj niekto iný a trebárs aj úplne iným spôsobom.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)