Pracovní režimy gyra
S postupem doby se gyra rozšířila z vrtulníků vyšších tříd i do jejich malých kopií a do dvourotorových strojů, které jsou samy o sobě stabilní již z principu.
A aby toho nebylo mále, dnes již není problém se potkat s gyrem i v modelu letadla, případně auta. Gyra se šíří modelářskou branží a čím více lidí se s nimi setkává, tím více otázek vyvolávají.
autor: Dr.LuckyLuke
pripravil: Janko O. Ze začátku se gyra dávala do modelů vrtulníků, kde pomáhala řídit ocasní (vyrovnávací) rotor. Ušetřila tak pilotům mnoho nervů a problémů, vrtulník byl najednou ve vzduchu mnohem stabilnější.
Ze začátku se gyra dávala do modelů vrtulníků, kde pomáhala řídit ocasní (vyrovnávací) rotor. Ušetřila tak pilotům mnoho nervů a problémů, vrtulník byl najednou ve vzduchu mnohem stabilnější.









Web stránka Dr.LuckyLuke RC noviny.
Výber z pôvodného článku na stránke Dr.LuckyLuke RC noviny.
Gyro jako takové má dnes většinou dva pracovní režimy. Jeden se nazývá Normal, non-AVCS, rate mode apod. Druhý bývá označen jako AVCS, HeadLock a dalších pár málo používaných. Podívejme se pořádně na to, jak se v těchto režimech gyro chová.
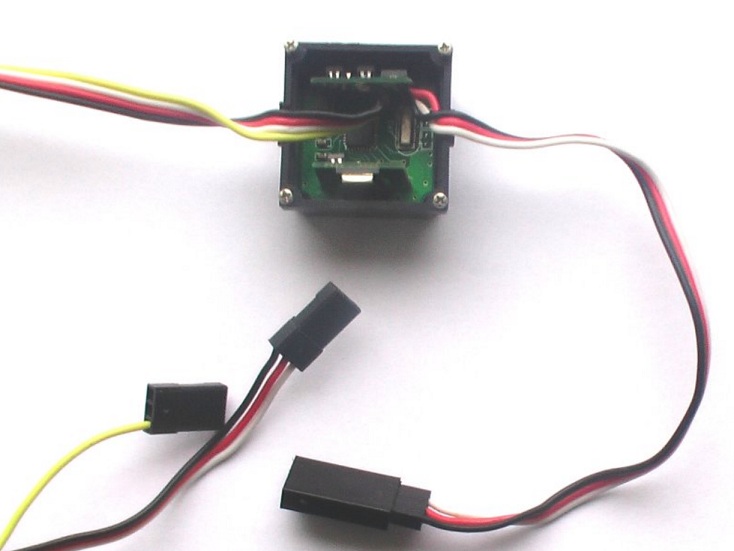
Pohled na gyro po otevření jeho krabičky
Režim Normal je starší a většinou jej „umí“ všechna gyra. Pokud je tento režim aktivní, korekční impulz gyra (jak moc ovládá k sobě připojené zařízení) je přímo úměrná okamžité hodnotě velikosti výchylky (rychlosti otáčení) a působí pouze po dobu, kdy tato výchylka trvá. Pro lepší představu použijeme model vrtulníku. Pokud provedeme jakýkoliv zásah do řízení, změní se reakční moment hlavního rotoru a vrtulník by se začal stáčet. Gyro tomu umí zabránit.
Gyro v režimu normal trpí jedním neduhem, kterému se říká „větrná korouhev“. Podobně, jako se větrná korouhev natáčí podle směru větru, stejně tak se natáčí i vrtulník s gyrem v režimu normal. Představme si visící vrtulník, na který začne působit boční vítr. Protože vítr působí hlavně na velkou plochu vyrovnávacího rotoru, vrtulník se natočí kabinou mírně proti větru, ale gyro tento pohyb zastaví. Mírné natočení je způsobeno tím, že gyro potřebuje určitý čas na to, aby zareagovalo. Protože korekce pracuje jen po dobu, kdy působí negativní výchylka, model své otáčení zastaví. Gyro si na chvilku myslí, že je vše v pořádku, ale vítr fouká stále. Model se proto zase o kousek pootočí. Celý děj se opakuje, dokud není vrtulník otočený kabinou proti směru větru.
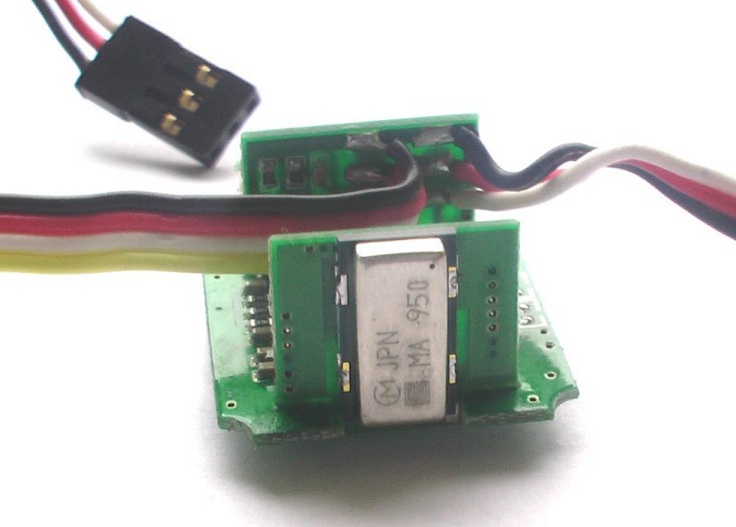
Vnitřek gyra - toto je vlastní piezosenzor
Režim HeadLock (AVCS) odstraňuje právě efekt větrné korouhve. Jedná se o modernější režim, který v dnešní době umí již většina dostupných gyr, ovšem v minulosti nebyla gyra s tímto režimem tak jednoduše dostupná. Gyro v režimu heading lock (heading = kurz, čili „kurz uzamčen“) nepůsobí proti větru pouze po dobu, kdy fouká, ale umí i vrátit ocas vrtulníku do původní polohy. Můžeme si jeho funkci jednoduše představit jako krabičku s pamětí. Ve chvíli, kdy je model něčím vychýlen ze svého kurzu (a není to pokyn z vysílače), gyro se pokusí otáčení zastavit. Přitom si „zapamatuje“ o kolik stupňů se model pootočil a po jeho zastavení se jej pokusí vrátit o stejný úhel zpět. Protože se ale vše děje velmi rychle, zdá se, že vrtulník má ocas stále stejným směrem, popřípadě jen velmi (ale opravdu velmi, téměř nepostřehnutelně) jemně kmitá.
Pokud zapojíme gyro mezi přijímač a servo (jak to chceme), dosáhneme stabilizace dané funkce. Nevýhodou ovšem je, že se pokyny z vysílače „perou“ s gyrem a tak se nám může ovládání zdát tupé, případně spomalené. I tento problém má několik řešení. To nejideálnější je, kdy gyro samo pozná, že kanál, ke kterému je připojené, ovládáme (např. porovnáváním šířky vstupních impulzů z přijímače) a v této chvíli samo sníží svůj zisk. Další možností je dynamické řízení zisku z vysílače. To ovšem předpokládá, že gyro je možné řídit na dálku (má dálkové ovládání zisku) a my máme vysílač, který má alespoň nějaké mixy. Potom se dá nastavit hodnoty kanálu pro řízení zisku gyra tak, ať se mění od maximální hodnoty, kdy je knipl ve středu po hodnoty minimální ve chvílích, kdy je knipl, kterým ovládáme kanál s gyrem v krajních pozicích. V případě, že není ani jedna možnost realizovatelná, je pouze na nás, ať si během provozu modelu uvědomíme přítomnost gyra a včas reagujeme při páčkování.
Súvisiace články:
Dynamické riadenie gýr v modeloch lietadiel
<Staršie | tento článok | Novšie>
Napísané: 30. 5. 2015, 11:55 | Prečítané: 7642x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)