Zisťovanie vlastností gýr – 2. časť
Jednak: prečo sa o používanie gýr a stabilizačných systémov v modeloch usilujeme, a za ďalšie: čo je možné dosiahnuť, prípadne, čo by bolo možné dosiahnuť s rôznymi druhmi stabilizačných zariadení.
autor: Janko O. V skutočnosti by tento článok mal mať nadpis: Zisťovanie vlastností gýr – „jeden a poltá“ časť, pretože na základe rozsiahlej diskusie k prvej časti tohto mini-seriálu, by sme si chceli, pred samotnými meraniami, niektoré veci ujasniť.
V skutočnosti by tento článok mal mať nadpis: Zisťovanie vlastností gýr – „jeden a poltá“ časť, pretože na základe rozsiahlej diskusie k prvej časti tohto mini-seriálu, by sme si chceli, pred samotnými meraniami, niektoré veci ujasniť.









My sami seba (a teraz hovorím asi viac za seba, ako za Miroslava) sa nepovažujeme za obzvlášť dobrých pilotov modelov. „Mierne podpriemerný“ - to by asi bolo to správne hodnotenie na pomyselnom modelárskom vysvedčení.
Sú modelári, čo chodia kľudne lietať aj v takom počasí, keď my ani nevychádzame z domu (keď aj vtáci radšej chodia pešo  ), nie že by sme ešte premýšľali o lietaní.
), nie že by sme ešte premýšľali o lietaní.
Sú modelári, niečo ako Dalibor Štěrba (Graup15), ktorý raz na RC mánii napísal niečo v zmysle, že on žiadne mixy, "dual rejty" a exponenciály ani nepotrebuje, pretože to ďaleko lepšie uriadi rukami.
Súhlasíme. Cez to všetko už asi 30 rokov sa na RC vysielačoch objavujú "dual rejty", exponenciály (voľakedy sa to volalo S-charakteristiky) a kadejaké mixy. A stále to pribúda a pribúdať bude.
Táto technika totiž svojimi schopnosťami kompenzuje isté "neschopnosti" pilota.
Keďže sme si vedomí našich pilotných "neschopností", radi dáme do modelu čokoľvek, čo ich nejakým spôsobom eliminuje alebo aspoň zníži.
Okrem toho má technika pred človekom aj ďalšie výhody: rýchlosť a presnosť.
Sú situácie, keď rýchlosť a presnosť zásahu sú rozhodujúcim faktorom toho, ako v konečnom dôsledku táto situácia dopadne, či dobre a či zle. O potrebnosti kvalitných gýr a rýchlych serv pri riadení vrtuľníkov nikto nepochybuje (zaujímalo by ma, či aj tu sa nájde niekto, kto to lepšie „uriadi rukami“  ). Taký vrtuľník bez gyra, stabilizovaný len rukami pilota, by sa asi motal, ako opitý tínedžer vychádzajúci z krčmy.
). Taký vrtuľník bez gyra, stabilizovaný len rukami pilota, by sa asi motal, ako opitý tínedžer vychádzajúci z krčmy.

Ale máme aj iný príklad: pred časom bol v televízii dokument (zrejme prevzatý z kanálu Discovery), ktorý porovnával, ako to vyzerá, keď šofér riadi auto normálne – čiže sedí v ňom, alebo tzv. „externe“ - diaľkovo. Niekoľko šoférov, pár skúsených, pár neskúsených, polovica žien a polovica mužov, nasadlo na opustenom mieste (v kameňolome) do pripravených „normálnych“ áut a mali absolvovať skúšobnú trasu. Výsledok: všetci došli do cieľa, jedni skôr, druhí neskôr. Nič nečakané.
Potom boli privezené také isté autá, ale do týchto bolo namontované diaľkové riadenie. Šoféri boli na skale nad lomom, tak aby mali dobrý výhľad a sedeli v „ovládačoch“. Všetko bolo tak ako v aute: volant, brzda, plyn … A mali absolvovať tú istú skúšobnú trasu, ako pred tým v normálnych autách. A výsledok: ANI JEDEN NEDOŠIEL DO CIEĽA, všetci s autami havarovali a bolo lauter jedno, či to boli skúsení vodiči a či nie, či to boli ženy a či muži.
Prečo?
Pretože sedieť priamo v aute, znamená všetkými zmyslami cítiť jeho správanie, cítiť, že začína ísť do šmyku, cítiť, že kolesá „hrabú“, cítiť, že pri prudšom brzdení auto prestáva reagovať na riadenie, cítiť, že odstredivé sily sú už za hranicou, kedy sa dá zákruta ešte prejsť, cítiť … To všetko vodič cíti ešte skôr ako je neskoro a môže zavčasu urobiť opatrenia (ubrať plyn, jemnejšie brzdiť, „kontrovaním“ volantom zrovnať začínajúci šmyk …..), vedúce ku zvládnutiu situácie. Ako často sme použili výraz cítiť? Ako často sme použili „časový faktor“: začína ísť do šmyku, prestáva reagovať, zavčasu urobiť opatrenia?
Keď spomínaní vodiči sedeli v „ovládačoch“, tak nič také necítili, len videli, že auto už je v (nezvládnuteľnom) šmyku, len videli, že prudko brzdiace auto vôbec nereaguje na riadenie (a naráža do prekážky), videli, že auto "trochu" rýchlejšie idúce prudšou zákrutou sa naraz nakláňa a následne prevracia a počuli (že reve motor, že sa krčia plechy, že …). A až potom (keď už bolo neskoro) urobili opatrenia, ktoré keby boli učinené včas, mohli viesť ku zvládnutiu situácie.
Len na upresnenie: základnými časťami modelárskych stabilizačných systémov a gýr sú SENZORY. A slovo Senzor je odvodené od anglického slova Sense – snímať, vnímať, vycítiť ...
A keďže aj my modelári riadime svoje modely „externe“, tak je táto situácia identická so spomínanou a ani my necítime (že sa model naklonil, že sa prúdnice začínajú odtrhávať, že …).
Preto si myslíme, že nie je na závadu mať niečo, čo cíti za nás. A nielen cíti, ale aj rýchlo (rýchlejšie ako človek) urobí opatrenia vedúce ku zvládnutiu situácie.
Ďalšia vec: aj keby sme boli dobrí piloti, tak do modelu radi dáme čokoľvek, čo predĺži jeho život, alebo zníži možnosť jeho poškodenia.
Aj k telemetrii pristupujeme tak, že pre nás to je zariadenie, ktoré (okrem iného):
-
zabráni poškodeniu modelu pri núdzovom pristátí modelu, keď mu v diaľke v nedostatočnej výške „dôjde šťava“
-
predĺži životnosť LiPol batérií, keď s modelom pristaneme skôr, ako ich napätie klesne pod nebezpečnú hodnotu a pritom sme nemuseli lietať „pre istotu“ na čas
-
zachráni model informáciou o jeho rýchlosti, ktorá sa blíži nebezpečne nízkej (a model sa prepadne), alebo nebezpečne vysokej (a vetroň sa rozpadne)
Toto sú teda dôvody, ktoré nás vedú k tomu, aby sme do našich modelov montovali telemetriu, či stabilizačné systémy a gyrá. Prečo niektorí modelári dávajú do svojich modelov stabilizačné systémy a gyrá je rozoberané na RC mánii vo vlákne „Autostabilizační systémy pro plošníky“.
A čo od týchto zariadení očakávame? Aký je praktický efekt gýr, aký je efekt autostabilizačných systémov a aký by mohol (či mal) byť efekt novo vyvíjaných stabilizačných systémov?
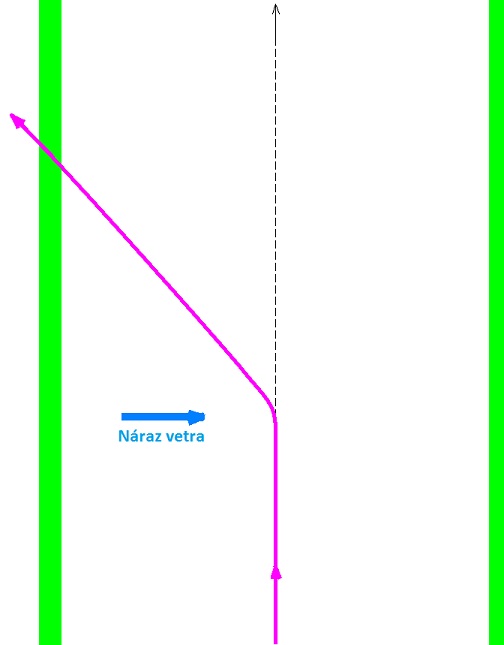
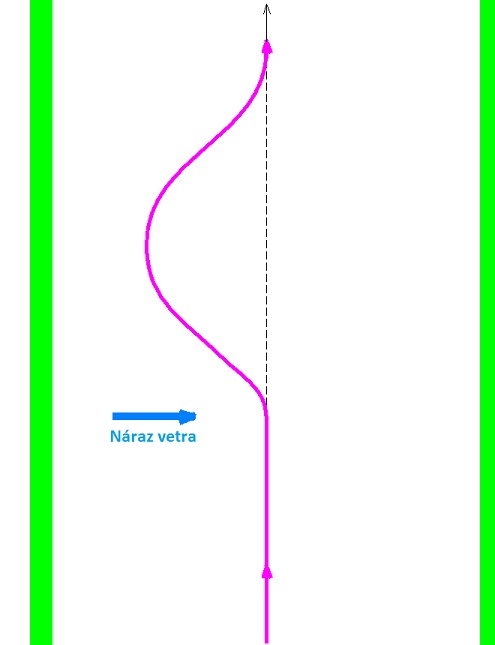
Aby nedošlo ku stavu, že jeden bude rozprávať „o voze“ a druhý „o koze“, definujme si (modelovú) situáciu, v ktorej budeme správanie jednotlivých zariadení porovnávať. Z istých dôvodov sme sa rozhodli navodiť stav, že model lietadla sa rozbieha po štartovacej dráhe a jeho smer je náhle zmenený (krátkym) nárazom vetra do ZCHP (Zvislej Chvostovej Plochy), čiže do smerovky modelu. Ako sa bude správať model bez akejkoľvek stabilizácie smeru pojazdu, ukazuje nasledujúci obrázok (pohľad zvrchu):
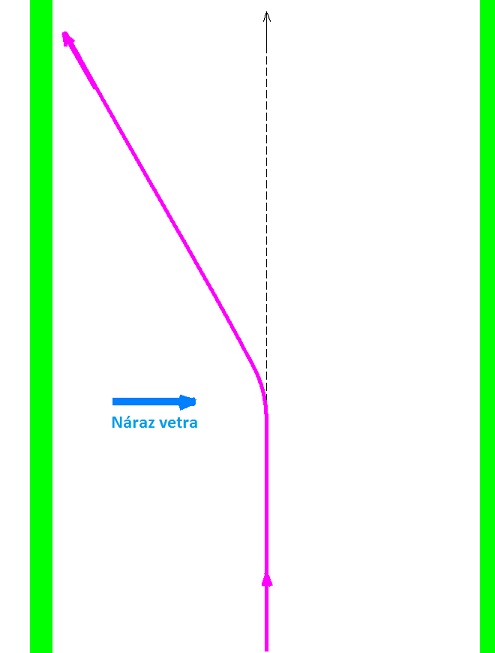
Ak do modelu nainštalujeme gyro s malou účinnosťou, pracujúce v režime Normal, ktoré koriguje riadenie prednej podvozkovej nohy modelu, ukazuje tento obrázok:
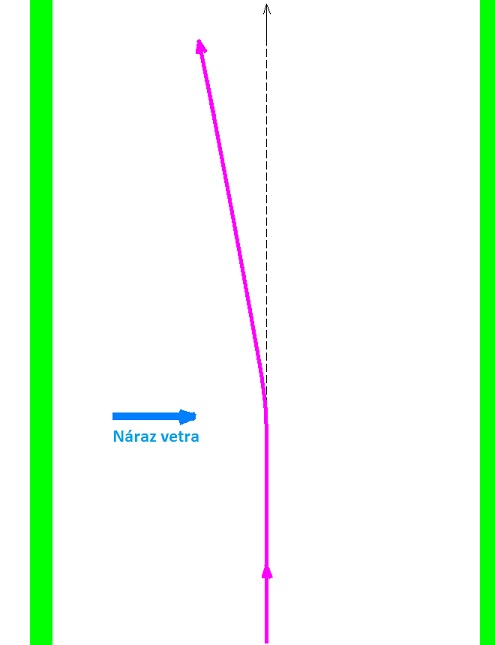
Ak gyru zvýšime účinnosť (zvýšime zisk – Gain), bude jeho odklon z pôvodného smeru menší. Avšak ani pri maximálnom zisku gyra nebude odklon nulový:
Ak do modelu nainštalujeme autostabilizačné zariadenie, napr. obľúbené FY-30A, tak dráha rozbiehajúceho sa modelu bude nasledovná:
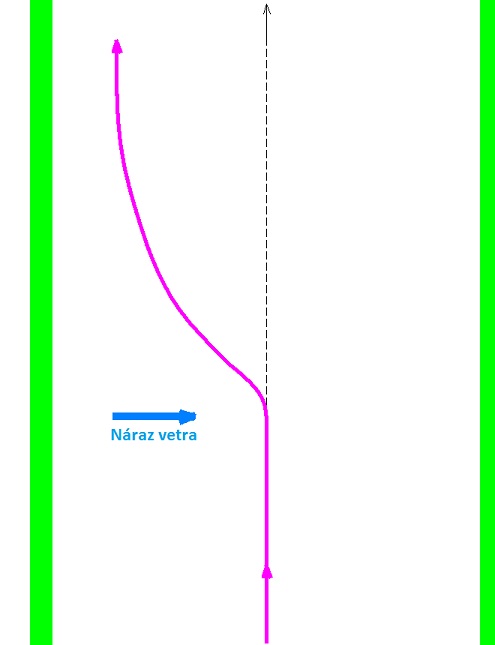
Bohužiaľ, ani pri použití takého dokonalého zariadenia, ako FY-30A bezpochyby je, sa model nevráti do svojej pôvodnej „stopy“.
Na to bude potrebné zariadenie s iným algoritmom činnosti. Po jeho zásahu by sa model mohol vrátiť do svojej pôvodnej „stopy“ (alebo sa jej aspoň priblížiť):
Súvisiace články:
Zisťovanie vlastností gýr – 1. časť
<Staršie | tento článok | Novšie>
Napísané: 14. 1. 2013, 20:53 | Prečítané: 10915x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 2
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)