Zisťovanie vlastností gýr – 1. časť
Použitím gýr v modeloch lietadiel sa zaoberáme pár rokov, ale stále to bolo na akejsi užívateľskej úrovni, čiže sme sa zmierili s tým, že to síce funguje, ale presnejšie analyzovať ich vlastnosti sme nedokázali.
Snažili sme sa predstaviť si, z čoho by sa taká „Gyrovská STK-čka“ mala skladať a ako asi by mala fungovať.
A „jedného krásneho dňa“ prišiel nápad.
autor: Janko O.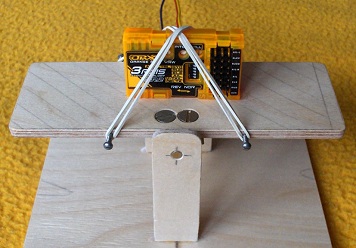 Budeme sa snažiť zistovať (merať, porovnávať) vlastnosti nielen samostatných gýr, ale aj autostabilizačných modelárskych systémov, ako celku. Niekedy sú nazývané Flight Stabilizers, čiže Stabilizátory letu.
Budeme sa snažiť zistovať (merať, porovnávať) vlastnosti nielen samostatných gýr, ale aj autostabilizačných modelárskych systémov, ako celku. Niekedy sú nazývané Flight Stabilizers, čiže Stabilizátory letu.









Pravdu povediac, tým rozhodujúcim popudom ku stavbe prípravku na zisťovanie vlastností gýr bola skutočnosť, že sa nám nedarilo (a zdá sa, že sa nám stále nedarí  ) pochopiť správanie gýr v režime Head Lock. Prečítali sme síce množstvo článkov a návodov, ale pri praktickom overení ich správania, to teórii nezodpovedalo.
) pochopiť správanie gýr v režime Head Lock. Prečítali sme síce množstvo článkov a návodov, ale pri praktickom overení ich správania, to teórii nezodpovedalo.
Funkcia senzorov gýr v režime Normal je podrobne popísaná v článku „Ako funguje Piezo-Gyro?“ Tu je v závere konštatované, že:
Senzory gýr tohoto typu reagujú len na tzv. rotačné zrýchlenie alebo matematicky povedané na deriváciu rotačného pohybu. Čiže nereagujú na akýkoľvek priamočiary pohyb, či už ustálený alebo na zrýchlovaný alebo spomalovaný. Rovnako nereagujú na ustálený rotačný pohyb.
Stabilizátory letu (aj gyrá) v súčinnosti so servami v modeli eliminujú nežiadúce náklony modelu, spôsobené vetrom, či inými nežiadúcimi vplyvmi.
Aby sme mohli vlastnosti gýr, stabilizátorov letu, alebo ľubovoľných autostabilizačných systémov sledovať v činnosti, bolo treba si k tomu vyrobiť špeciálny prípravok (v skutočnosti vlastne prípravky dva). Pretože sledovanie vlastností týchto zariadení len tak „na kolene“, pomocou servotestera, serva a nakláňaním gyra, je vzhľadom na derivačný charakter výstupu gyra pomerne problematické.
Bolo jasné, že buď bude potrebné vyrobiť zariadenie, ktoré bude schopné nakláňať gyro presne definovaným spôsobom, alebo zariadenie, ktorým sa bude gyro nakláňať ručne, ale intenzitu a rýchlosť nakláňania bude možné nejakým spôsobom merať, alebo zaznamenať (a neskôr analyzovať).
Vyhrala druhá metóda, ktorej základom je prípravok, ktorému sme dali meno „Stolica“. Miroslav hneď v úvode vyslovil isté obavy z tohto názvu, pretože nevylúčil, že niektorí modelári sa na tento názov pozrú nie z technického, ale z lekárskeho hľadiska  . A potom je medzi významom technickým a lekárskym sakramentský rozdiel. Ale nedá sa nič robiť, názov sa už ujal a používame ho.
. A potom je medzi významom technickým a lekárskym sakramentský rozdiel. Ale nedá sa nič robiť, názov sa už ujal a používame ho.
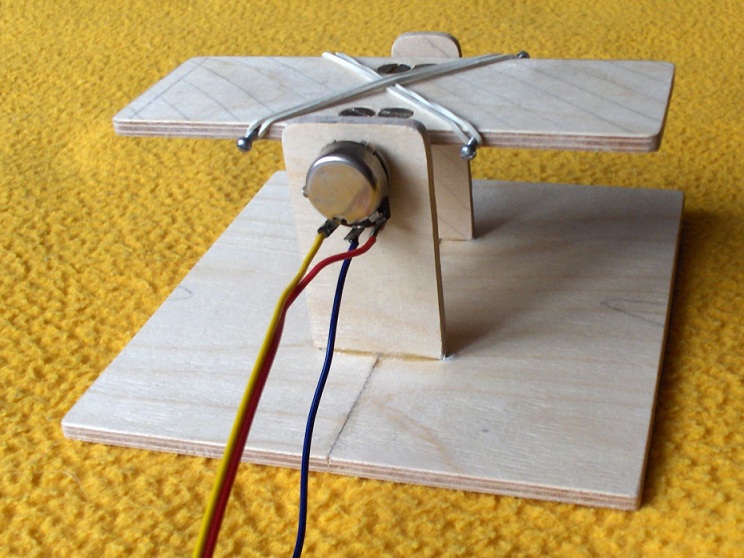
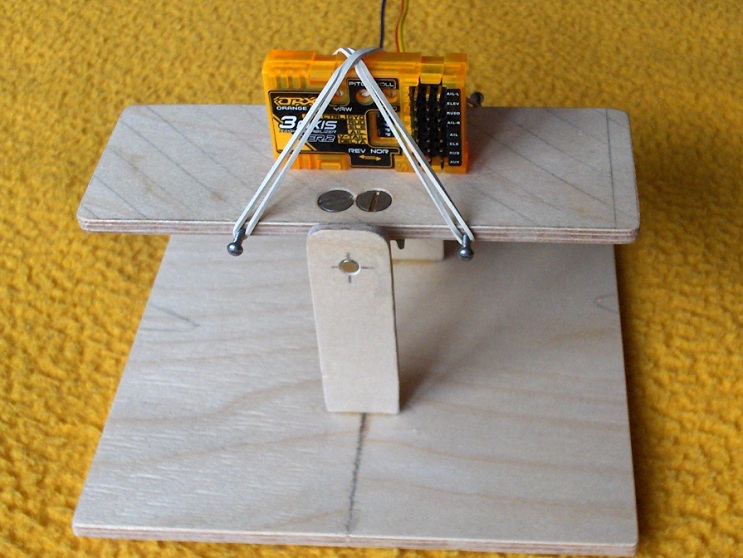
Základom prípravku je potenciometer s dlhou oskou, ktorý plní úlohu mechanickú, ale hlavne elektrickú, keď sníma polohu (naklonenie) testovacej plošiny:
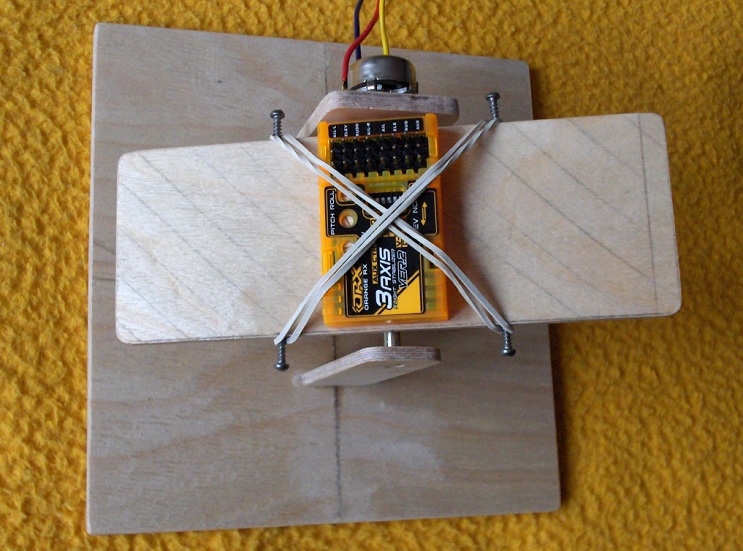
Na testovaciu plošinu sa gumičkami pripevňuje testovaný objekt, napríklad samostatné gyro:
Testovacia plošina mierne naklonená vľavo.
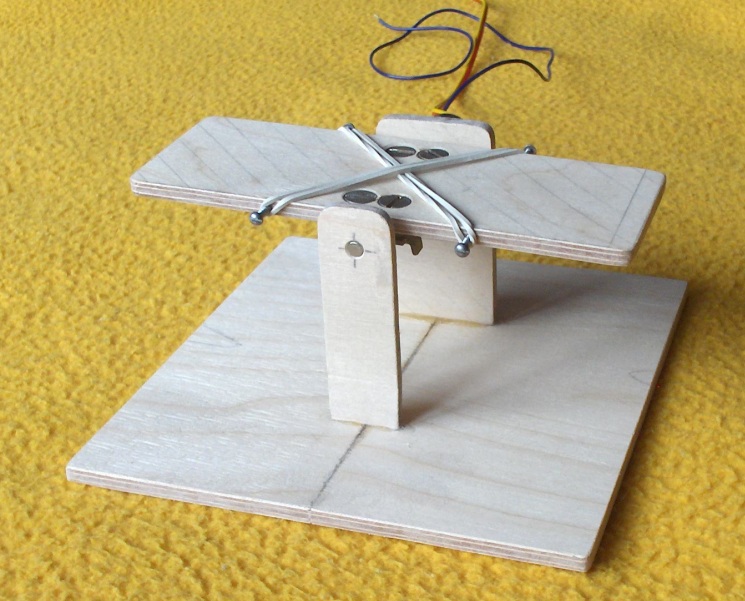
V prípade Stabilizátorov letu, ktoré sú schopné stabilizovať model okolo troch osí, je nutné zariadenie na testovacej plošine správne orientovať.
Pre „krídielkovú“ stabilizáciu:
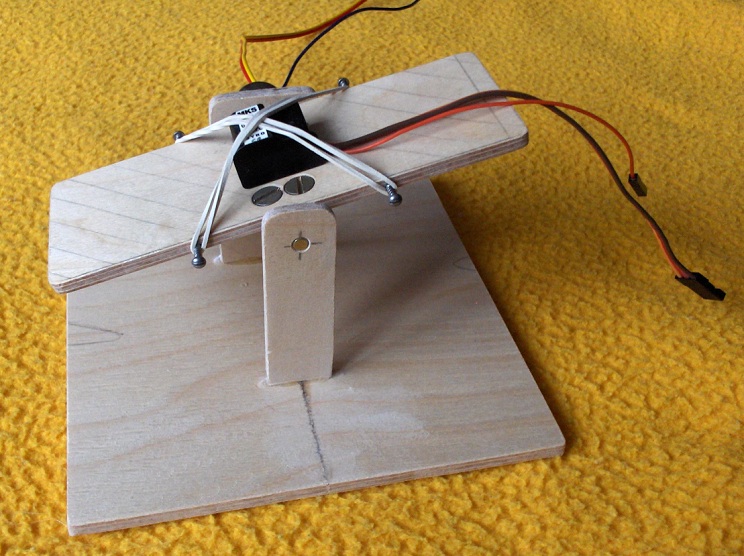
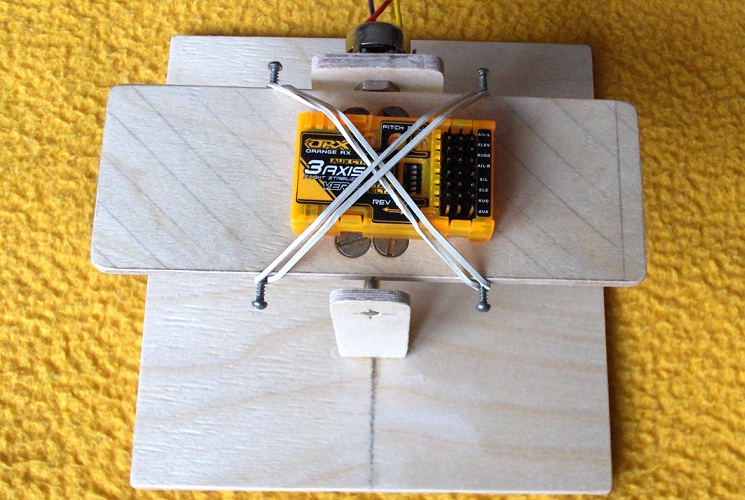
Pre „výškovkovú“ stabilizáciu:
A pre „smerovkovú“ stabilizáciu:
Testovacia plošina vo vodorovnej polohe.
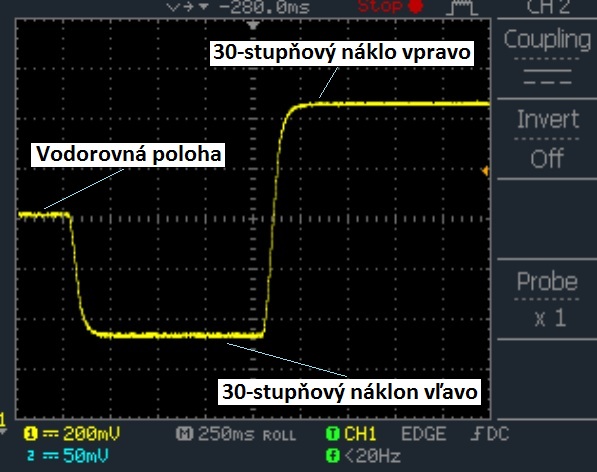
Ak potenciometer budeme napájať stabilizovaným napätím (v našom prípade 5V), tak napätie na bežci potenciometra sa bude meniť podľa toho, akú polohu (aký náklon) má testovacia plošina. Potenciometer sme nastavili (do stredu) tak, že pri vodorovnej polohe testovacej plošiny je na jeho bežci polovičné napätie, teda 2,5V. Pri náklone na jednu stranu napätie klesne, pri náklone na druhú stranu napätie vzrastie. Závislosť medzi náklonom testovacej plošiny a napätím potenciometra je jednoznačná a lineárna. A o to nám šlo.
Pri zobrazovaní na osciloskope sme jeho „stopu“ posunuli tak, aby pri vodorovnej polohe testovacej plošiny stopa prechádzala stredom obrazovky. Potom pri preklopení testovacej plošiny z vodorovnej polohy do ľavého maximálneho náklonu (30 stupňov) a potom do pravého maximálneho náklonu (tiež 30 stupňov), môžeme na obrazovke osciloskopu dostať napríklad takýto priebeh napätia bežca potenciometra:
Pri náhodnom nepravidelnom naklápaní testovacej plošiny raz na „tú“, či potom na „onú“ stranu môžeme dostať zase takýto priebeh:
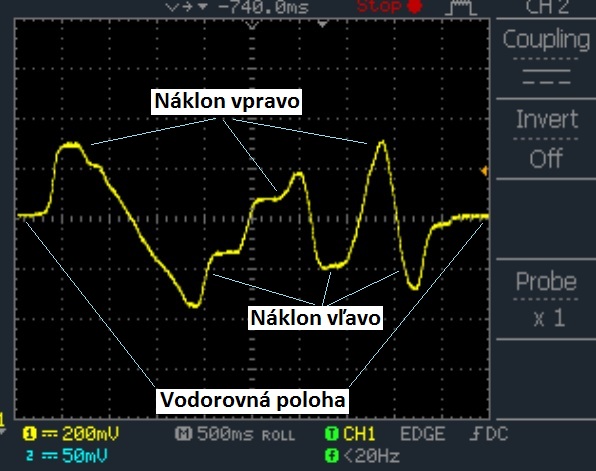
Na doplnenie: začiatok aj koniec „divokého“ nakláňania je vždy vo vodorovnej polohe. Rýchlosť pohybov je možné určiť z toho, že (na tomto konkrétnom obrázku) jeden dielik záznamu zodpovedá 500 milisekundám času.
V budúcej časti si ukážeme zariadenie na grafické vyhodnocovanie zmeny šírky servo-impulzov, spôsobené činnosťou gyra, či stabilizátora letu. A našej analýze podrobíme funkciu jedného z najlepších Flight Stabilizerov: FY-30A.
Súvisiace články:
Zisťovanie vlastností gýr – 2. časť
Zisťovanie vlastností gýr – 3. časť
<Staršie | tento článok | Novšie>
Napísané: 9. 1. 2013, 18:04 | Prečítané: 12093x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 31
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Chceš ju odkúpiť?
Lebo nikto Ťa nenúti čitať, ak nechceš!
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 .
.
Tento článok je určený pre tých, ktorí systémy stabilizácie letu (napr. gyrá) už používajú, alebo sa chystajú ich používať a úprimne ich zaujíma, ako naozaj fungujú.
Ak ty nie si ten prípad, tak článok nečítaj.
Z tvojho pohľadu aj miorov článok "Trojkráľové zamyslenie nad OpenSource v modelárstve" je bakalárska práca. Aj Vpershingov článok "Novoročné zamyslenie alebo OpenSource v modelárstve (Turnigy T9)" je bakalárska práca. Keď sa to tak vezme, tak polovica článkov na našej Web stránke, je bakalárska práca.
Podľa teba aj popis pripojenia batérie k regulátoru je asi bakalárska práca.
Ak to tvoja hlava nepobere, tak si čítaj články, ako sa dokopy zliepajú polystyrénové časti rozbitého modelu. To hádam zvládneš.
Ak aj to je nad tvoje sily, tak potom nechápem, prečo túto Web stránku navštevuješ.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Super

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
 vysledky
vysledkyDeprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
tak som to práve odskúšal.
Veľa nechýbalo a bol by som hodil "jedovatú slinu" na ten tebou spomínaný Orange 3-axis Flight Stabilizer (v2).
Ide o to, že prepojil a zapojil som všetko, čo bolo treba (a že tých konektorov a káblikov je požehnane), okrem káblika zapínania/vypínania stabilizácie, označeného Aux (Auxiliary). Ako že to idem vyskúšať bez tohto ovládania, že stabilizácia bude stále zapnutá.
Všetko fungovalo, len všetky tri servá "rázovali": v intervale asi 300 milisekúnd sa pravidelne vychylovali asi o 5mm (na páke 15mm). Čo je dosť. Tak takáto funkcia by servá "zhuntovala" po pár letoch, nehovoriac o tom, ako by sa správal model.
Máme ešte jeden taký istý stabilizátor, tak som skúsil aj ten. Výsledok: presne to isté.
Bol som veľmi skľúčený, pretože ja som zástanca čínskych modelárskych výrobkov, pretože mne skoro všetko čínske bezvadne funguje.
Všetko som rozobral, pobalil do sáčkov a odložil, a že ti idem napísať tento neradostný výsledok.
Potom mi napadlo, že skúsim to ešte s tým káblikom pripojeným do Aux (nech mám čisté svedomie, že som skúsil všetky možnosti).
Znovu všetko vybaliť, popripojovať, poprepojovať, pozapínať ...
A ejhle, ono to naraz funguje perfektne.
Aby sme si rozumeli: skúšal som to na stole, nie v modeli (na to teraz nie sú podmienky). Všetko fungovalo ako má: všetky 3 servá, nastavenie miery stabilizácie všetkých troch osí, diaľkové zapínanie/vypínanie. Skrátka všetko.
Ja som zástanca takýchto zariadení v modeli, takže odo mňa hádam nikto neočakáva, že ak to dobre funguje, že by som ti povedal, že nedoporučujem. Samozrejme, že doporučujem.
Ale, keby som nebol zapojil ten káblik, tak by som ti bol napísal, že to nefunguje dobre a že do modelu to radšej nedávaj.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
( Mozno aj on lietal s cinskou elektronikou). Tiez mam v drvivej vacsine pozitivne skusenosti s "cinou", ale hoci inak sudruha Lenina nemusim, tato zasada je v modelarstve dobra Kazdopadne vdaka moc za odskusanie aj za tieto tvoje stranky ...
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
na tú tvoju poslednú vetu ti odpoviem, že ja radšej napchám do modelu kadečo, aby som mohol po havárii na to nadávať. Hádam nebudem nadávať na seba
. Doma nadávam na manželku, pri lietaní nadávam na modelársku techniku. Základ je: niekoho si nájsť, na koho sa bude nadávať.
A teraz vážne: ja gyro na stabilizáciu riadenej prednej nohy používam v modeli Partenavia P-66 Oscar (taký veľký modrý, rozpätie 222cm, neviem, či si ho už videl) - je na predposlednom obrázku tohto článku: odkaz
Používam tam gyro MKS380, nastavené na "mierny" účinok, ale chcem vyskúšať aj väčší účinok, prípadne iné gyro. Práve na tento účel by sa malo TEORETICKY hodiť gyro v režime Head Lock. Ale pri pokusoch na stole sa ukázalo, že model by hneď pri prvom štarte robil psie kusy. A aj pre toto som zrealizoval tú "stolicu" a hodlám nájsť gyro a jeho zodpovedajúci režim, aby model pri štarte dobre držal stopu.
Už pri použití toho MKS380 je to lepšie, ako bez neho, ale ja mám (možno mylnú) predstavu, že model by mal pri štarte a po pristátí držať stopu, ako vlak na koľajniciach.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Radšej hľadám chybu v sebe ako v technike, tá by mala fičať na 100% aj keď to nie je vždy pravda.
Ide mi o to ako ovplyvňujú vibrácie (napr. od hrbov na povrchu pri štarte) správny chod gyra. Radšej to budem "kaziť" pri štarte sám ako mi tam má gyro dávať každú milisekundu nejaký iný povel do serva. Presne to chcem docieliť "vlak na koľajniciach"
a kazič za páčkami

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
toho sa nemusíš báť. Gyro (či Flight Stabilizer) je technické zariadenie, ktoré má presne definované svoje správanie (to, že ho my nechápeme, to je iná vec a gyro za to nemôže). Gyro v režime Normal by dalo do serva nejaký povel len vtedy, keby došlo ku zmene smeru jazdy modelu po štartovacej dráhe. Gyro funguje ako záporná spätná väzba: Keď niečo (dokonca aj pilot) sa snaží model odkloniť na jednu stranu, gyro sa snaží vytočiť koliesko na druhú stranu. A tým zmierniť zatáčanie modelu. Tento efekt zápornej spätnej väzby je názorne popísaný tu: odkaz a tento nežiadúci efekt vyriešený v článku: Dynamické riadenie gýr odkaz
Ja dávam gyrá na suchý zips, ten okrem možnosti dodatočného polohovania či odnímania pôsobí aj ako akýsi "vankúšik" a chráni gyro pred vibráciami.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
No, je to celkom zaujímavá problematika, teším sa už na pokračovanie a možno aj dajaké praktické skúšky
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Medzi nami dvomi je totiž zásadný rozdiel: ty si dobrý pilot, ja nie (ak, tak sotva priemerný). Ty si chodíš kľudne lietať v takom počasí, že ja radšej nevychádzam z domu, nie že by som ešte premýšľal o lietaní.
Ty si niečo ako Dalibor Štěrba (Graup15), ktorý raz na RC mánii napísal niečo ako, že on žiadne mixy, "dual rejty" a exponenciály ani nepotrebuje, pretože to ďaleko lepšie uriadi rukami.
Súhlasím. Cez to všetko už asi 30 rokov sa na RC vysielačoch objavujú "dual rejty", exponenciály (voľakedy sa to volalo S-charakteristiky) a kadejaké mixy. A stále to pribúda a pribúdať bude.
Táto technika totiž svojimi schopnosťami kompenzuje isté "neschopnosti" pilota.
Keďže som si vedomý svojich pilotných "neschopností", rád dám do modelu čokoľvek, čo ich nejakým spôsobom eliminuje alebo aspoň zníži.
Druhá vec: aj keby som bol dobrý pilot, tak do modelu rád dám čokoľvek, čo predĺži jeho život, alebo zníži možnosť jeho poškodenia. Príklad: uznáš sám, že štarty a pristátia modelov na letisku Čerín-Čačín občas končia poškodením podvozku, ak model, ktorý "nedržal stopu" narazil do tých zabetónovaných pneumatík, čo sú na okraji dráhy. V lepšom prípade sa "nedržanie stopy" skončí "pribrúsením" koncov krídiel modelu.
Ak existuje niečo, čo zlepší "držanie stopy" modelu, použijem to.
Uznávam tvoj argument, že namiesto nejakého gyra, sa radšej viac pohráš s podvozkom. Moja osobná skúsenosť je, že dobrý podvozok je niekedy drahší, ako celý model. Navyše dobrý podvozok, to väčšinou znamená precízny strojársky výrobok. Ale ja nie som strojár, nemám sústruh, frézu ...
A tak ak pri X-kopteroch, v porovnaní s klasickými vrtulníkmi, je komplikovaná a presná mechanika nahradená komplikovanou a presnou elektronikou, tak ja radšej komplikovaný a presný strojársky výrobok nahradím komplikovaným a presným elektronickým výrobkom. Pretože k elektronike mám oveľa bližšie, ako ku strojárine. A aj čo sa výbavy (stroje, prístroje, náradie, meracia technika ...) týka, tak tú mám oveľa lepšiu elektronickú, ako strojársku - mechanickú.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Preto je pre nás mimoriadne dôležitá tvoja informácia, že: "... pri maketovom lietaní s vrtuľníkmi, kedy sa väčšinou používa režim Normal kôli "ťahaniu chvosta za sebou"."
Avšak práve preto, že nemáme žiadne skúsenosti s vrtulníkmi, ktoré používajú gyrá, nedarí sa nám "stráviť" režim Head Lock, pretože mimovoľne je pre nás predstava, že model (krídlatého lietadla) letí bokom, nenormálna.
Preto chceme aj správanie gýr v režime Head Lock analyzovať meraním na "stolici" a na základe zaznamenaných priebehov výstupného signálu správne pochopiť jeho činnosť.
A tu by sme potrebovali práve tvoju pomoc, keby si nám potom v tomto pomohol.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
V prvom rade by som rozdelil systémy na Stabilizačné jednotky pre lietadlá, potom na vrtuľníkové Gyrá Normal a Gyrá HL. A tie vrtuľníkové HL by som sa snažil zmerať aktívne, lebo podľa mňa budú výsledky iné, keď sa bude gyro merať "nasucho" a iné, keď bude aktívne vyrovnávať. Stačil by k tomu hocijaký malý vrťas so samostatným gyrom, len by musel byť pripevnený na nejakú otočnú základňu (čo ja viem, možno by stačila otočná stolička bez operadla....)
Takto by sa asi najlepšie videlo, čo ktorá skupina robí a ako reaguje na nejaký podnet (skupinu podnetov), ktorý by bol pri všetkých testoch rovnaký...
Ja s mojim vybavením môžem testovať akurát tak praktickú stránku veci, na meranie mám len šubleru a teplomer na okne
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
- naozaj chceme samostatne merať stabilizačné zariadenia pre krídlaté lietadlá (plošníky) a samostatne stabilizačné zariadenia pre vrtulníky.
- tie prvé chceme samostatne merať: gyrá a samostatne kompletné systémy
- vrtulníkové gyrá chceme merať v režime Normal (lebo veríme, že budú aspoň čiastočne použiteľné pre plošníky)
- vrtulníkové gyrá režime Head Lock zmeriame "nasucho" a budeme sa snažiť pochopiť ich činnosť a nájsť eventuálne použitie pre plošníky (???)
- meranie vo vrtulníku bude problém, pretože ani jeden z nás vrtulník nemá a nie som si istý, či kvôli tomu budeme dáky kupovať (asi nie). Okrem toho nás vrtulníky príliš nezaujímajú, takže ak by sme zistili, že HL mód je pre plošníky nepoužiteľný, tak síce uroníme slzu, že sme to nevyskúšali vo vrtulníku, ale inak asi na gyrá s HL módom zanevrieme, pre ich nepoužiteľnosť v plošníkoch.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
A toto je tá správna chvíľa na použitie Open Source: Source (zdroj) - v tomto prípade hlavu, treba otvoriť - Open. Volá sa to "trepanácia". Žiaľ, po trepanácii niektorí dosť trepú, takže viac sa osvedčil čakan. Nie je znýmy prípad, že by po otvorení hlavy čakanom niekto trepal. Navyše po použití čakanu netreba na výsledok ani dlho čakať.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
. Zatiaľ som to kýval len v ruke, gyro gyruje aj v Normal aj HL móde, ak bude dobré počasie, pôjdem zajtra pojazdiť. Zatiaľ sa zdá, že HL je nepoužiteľný...no uvidíme.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Zatiaľ nám vychádza, že:
- niektoré systémy to (napr. vetrom spôsobené) "vybočenie z koľajníc" iba zmiernia - odklonenie modelu z pôvodného smeru bude menšie, ale model pokračuje v inom smere, ako pred poryvom vetra.
- niektoré systémy sú schopné vybočenie po čase úplne eliminovať (model sa vráti do pôvodného smeru, ako pred poryvom vetra), ale model sa už nevráti na pôvodnú "koľaj", ale pokračuje akoby po vedľajšej paralelnej koľaji.
- systémy, ktoré budú schopné vybočenie eliminovať a ešte aj model vrátiť na "pôvodnú koľaj" zatiaľ nepoznám. Ale napadlo mi, že nejaké elektronické "udělátko" k existujúcemu stabilizačnému systému by to dokázalo.
Ale v tomto prípade sme ešte len v teoretickej rovine. Preto potrebujeme dôverne poznať správanie rôznych stabilizačných systémov.
Ak sa to niekomu javí ako "bakalárska práca", ako to napísal "tak tak" na začiatku komentárov, je to jeho problém ale nás neodradí.
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Skúsime ho nejako uchytiť podobne ako stolicu a uvidíme...
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)