Střídavé motory s a bez senzorů
Tento článek Vám rozdíly alespoň trochu přiblíží.
autor: Dr.LuckyLuke
pripravil: Janko O. Jaký je rozdíl mezi střídavými motory s dodatečnými senzory a bez nich?
Jaký je rozdíl mezi střídavými motory s dodatečnými senzory a bez nich?









Web stránka Dr.LuckyLuke RC noviny.
Pôvodný článok na stránke Dr.LuckyLuke RC noviny.
Střídavé motory, které jsou navíc vybaveny senzory polohy se nejčastěji používají tam, kde je třeba hned od začátku (už při roztáčení motoru) velmi vysoký kroutící moment, nebo kde se kroutící moment během práce motoru velmi liší. Nejlepším příkladem podobného prostředí je použití střídavého motoru v modelu auta. Pokud se zaměříte na použití střídavých motorů v průmyslu nebo letectví, málokdy najdete použitý střídavý motor bez senzorů.
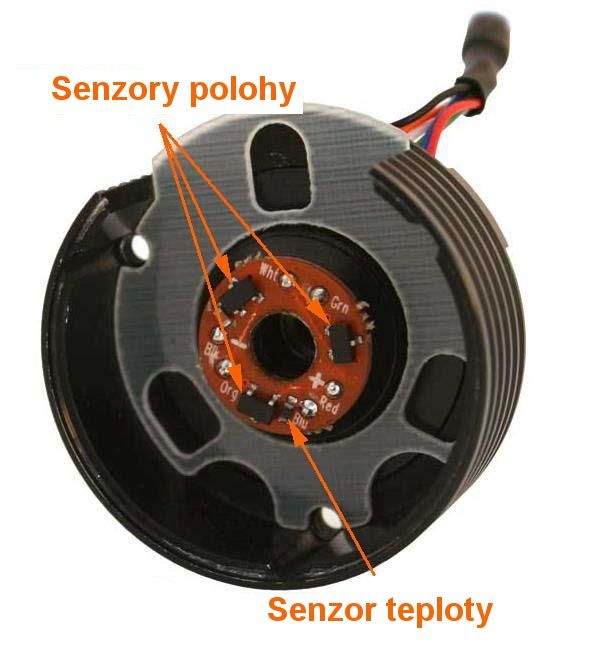
Střídavé pohonné systémy (vždy je třeba motor se senzory a regulátor, který rozumí signálům od senzorů, proto systémy) se senzory mají tu výhodu, že vždy znají pozici rotoru. To je důležité hlavně pokud motor stojí, nebo při jeho nízkých otáčkách. Když regulátor zná správnou pozici rotoru, může efektivně pouštět proud do „správných“ cívek motoru a tím dosáhnout vysokého kroutícího momentu již při rozběhu.
Některé regulátory (například Novak’s GTB) umí použít 100% napětí na správné fáze motoru ihned po dekódování signálů ze senzorů. Díky tomu se střídavé systémy se senzory chovají spíše jako stejnosměrné motory a dodávají maximální „sílu“ již při rozběhu ze zastaveného stavu. A to bez ztrát způsobených na komutátoru a uhlících. Další výhodou senzorů je to, že motor a regulátor jsou vždy synchronizovány při jakékoli rychlosti motoru.
Čas, který regulátor potřebuje ke zjištění polohy rotoru na základě údajú od senzorů se pohybuje v řádu několika mikrosekund. Když se bude motor točit rychlostí například 80 000 otáček za minutu (takže 1 333 otáček za vteřinu) bude jedna otočka rotoru trvat 0,75 milisekundy. Když procesor v regulátoru bude pracovat na dnes už obvyklých 20 MHz, znamená to, že procesor během jedné otočky motoru může zpracovat více než 15 000 instrukcí. To znamená, že i při takto vysokých rychlostech motoru má procesor stále hodně času nato, aby správně zpracovával signály ze senzorů. A samozřejmě má také dostatek času na to, aby na základě signálů ze senzorů správně otevíral koncové tranzistory, které ovládají proud procházející cívkami motoru.
Naproti tomu systémy (motory a regulátory) bez senzorů nemají možnost zjistit polohu rotoru do té chvíle, dokud se rotor netočí alespoň nějakými minimálními otáčkami. Teprve až potom začíná motor fungovat i jako generátor a regulátor si může zjistit polohu rotoru (blíže viz. barevný text na konci článku). Nejhorší proto pro motory bez senzorů je rozběh. Protože regulátor nezná pozici rotoru, může ji jen odhadovat. A protože u střídavých motorů nejde jen tak přivést napětí na nějakou z cívek a čekat, že se motor roztočí, je třeba, aby regulátor používal pro rozběh motoru speciální sekvenci podle které přivádí napětí na cívky motoru. Tímto postupem se motor většinou roztočí, ale také se může stát, že se rotor někde trošku „zpozdí“ a motor s regulátorem tak vypadnou ze synchronizace. To se například projeví tak, že se motor točí pomalu a vydává divné zvuky i když by se podle polohy kniplu měl točit naplno.
Regulátory bez senzorů většinou fungují při rozběhu tak, že na určitou dobu přivedou napětí na dvě ze tří cívek motoru. Díky tomu se rotor natočí do nějaké alespoň přibližně definované polohy a v této poloze zůstane, protože se napětí na jeho cívkách nemění. Po této krátké první fázi rozběhu začne regulátor přivádět postupně napětí na jednotlivé fáze motoru a ten se pomalu začne roztáčet na stále vyšší rychlost díky tomu, že regulátor pomalu zkracuje intervaly ve kterých přivádí napětí na jednotlivé cívky. Je třeba si ale uvědomit, že regulátor polohu rotoru vůbec nezná, jen „doufá“, že je rotor natočený tak, jak regulátor předpokládá. Jakmile se motor začne točit dostatečně rychle na to, aby bylo možné použít měření back-EMF, přepne se regulátor z fáze rozběhu do fáze běhu motoru a právě na základě měření back-EMF řídí motor a jeho otáčky.
Jak vidíte z rozdílu sekvencí, které používají pro rozběh regulátory s a bez senzorů, tak můžeme v klidu tvrdit, že jeden mýtus rozšířený mezi modeláři je úplně „zbořen“. Není totiž pravda, že by motory bez senzorů startovaly (rozbíhaly se) rychleji, než motory se senzory. Dokonce se dá tvrdit, že tomu je naopak, protože senzorový motor se dá roztočit přesněji a rychleji. Systém bez senzorů musí vždy nějaký čas využít na to, aby si pomocí back-EMF detekoval pozici rotoru. Tuto dobu může systém se senzory využít pro napájení motoru.
Regulátor, který je připojen ke střídavému motoru bez senzorů nemůže zjistit polohu rotoru přímo. Vždy musí počkat na chvíli, kdy se rotor už nějakou rychlostí točí. Když v této chvíli dojde k úplnému odpojení napájení od motoru, tak začne motor fungovat jako dynamo. Svou setrvačností se ještě točí a protože se kolem vinutí pohybují magnety, dochází k tomu, že se na vinutí generuje napětí přesně podle polohy magnetů nad vinutím. Když si regulátor průběh tohoto napětí změří, může přibližně zjistit v jaké poloze se rotor nachází. Této metodě, kdy se měří napětí generované motorem se často označuje jako back-EMF.
Zjišťení polohy rotoru bez senzorů
<Staršie | tento článok | Novšie>
Napísané: 29. 9. 2021, 08:24 | Prečítané: 10133x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 4
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
dalsie clanky o striedavych motoroch, zapojeni cievok a doplneni senzorov polohy rotora. Dakujem
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407

Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)