Výstup kanálových impulzov z rôznych RC prijímačov
V skúšobnom zapojení na stole všetko funguje, po inštalovaní do modelu už nie, alebo je činnosť týchto zariadení prinajmenšom prapodivná.
Možno tento článok nemusí zaujímať všetkých, ale tí, ktorí sa rozhodli let svojich modelov stabilizovať gyrami (napr. MKS380, či Turnigy380), by si ho asi prečítať mali.
autor: Janko O.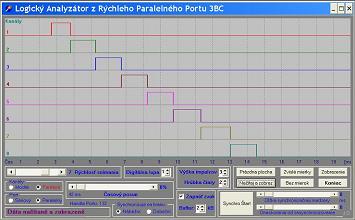 Tí, čo používajú rôzne kanálové spínače, GYRÁ s elektronickým riadením zisku a mix-moduly, ktoré sú priamo v modeli, to možno poznajú.
Tí, čo používajú rôzne kanálové spínače, GYRÁ s elektronickým riadením zisku a mix-moduly, ktoré sú priamo v modeli, to možno poznajú.
Asi najčastejšie sa stáva, že so starým prijímačom všetko pracovalo OK, ale po "apgrejde" na novšie technológie sa vynoria nečakané problémy. Nechceme vymenovávať všetky kombinácie, kedy sa čo mohlo a kedy nemohlo stať. Navyše pred časom vyšli v RCR články na túto tému aj s vysvetlením. Nechceme zavádzať duplicitu, ale sú modelári, ktorí namiesto papiera, majú radšej elektronické písmenká a namiesto zdĺhavého listovania v časopisoch uprednostňujú oveľa modernejšie "vyGúglenie".
Ako už bolo v úvodnom odstavci zdôraznené, problémy môžu nastať po pripojení zariadení, ktoré spracovávajú signály z dvoch (alebo viacerých) kanálov súčasne. Môžu ale nemusia. Záleží totiž od toho, v akom poradí vychádzajú signály jednotlivých kanálov z RC prijímača. Ak sa jedná o starší ("nemikroprocesorový") prijímač, kde je v kanálovom dekodéri použitý posuvný register (napr. 74164, CD4013, CD4015 apod.), nenastane žiadny problém. Tu jednotlivé kanálové impulzy vychádzajú z RC prijímača pekne postupne, po skončení jedného sa okamžite objavuje ďalší. Nie sú medzi nimi medzery, ale hlavne - žiadne sa neprekrývajú.


To je dôležité pre hore spomínané zariadenia, najmä GYRÁ (bližšie v článku Použitie gýr v modeloch lietadiel - 1.časť), ktoré vstupné signály väčšinou spracovávajú tak, že najskôr zmerajú šírku impulzu jedného kanálu, potom druhého, a z nich, na základe matematických operácií, vygenerujú požadovaný výstupný impulz. Ak sa impulzy časovo prekrývajú, alebo nie sú v správnom poradí, zariadenie je zmätené a generuje tomu zodpovedajúci chaos.
Existujú aj zariadenia, ktoré dokážu súčasne spracovávať dva vstupné signály, ale s nimi žiadny problém nenastane a preto sa im nebudeme ani venovať (je to ako so zdravím: keď nás niečo nebolí - nevenujeme sa tomu, keď nás niečo trápi - stáva sa to stredobodom pozornosti).
S príchodom nových technológií sa situácia v tomto smere skomplikovala. Začalo sa to ešte v RC prijímačoch pre pásma
Podstatné je, že toto už posuvný register a ani ostatné bežné logické obvody nemohli zvládnuť a na scénu (do dekodéra RC prijímača) nastúpil mikroprocesor. No, nie je to mikroprocesor, je to mikrokontrolér, ale mikroprocesor - to znie lepšie. Niektorí výrobcovia idú dokonca tak ďaleko, že svoje RC prijímače označujú skratkou DSP (Digital Signal Processor), čo ale zrejme trochu prehnali, pretože DSP je niečo iné.
S príchodom RC súprav pre pásmo 2,4 GHz bolo jasné, že v nich výstupné kanálové impulzy nebude generovať žiadny posuvný register, ale výhradne mikrokontrolér. A tu už záleží len od riadiaceho programu mikrokontroléra, v akom poradí budú kanálové impulzy vychádzať z RC prijímača. Niektorí výrobcovia sa vydali cestou - jednoduchšie a lacnejšie. Príkladom je lacný, ale prekvapujúco citlivý (asi čínsky) 6-kanálový prijímač pre pásmo 35/40 MHz SunUp s označením: SU/R-6FM/PPM, ktorého sekvencia výstupných kanálových impulzov je v podstate rébus.


Ďalším RC prijímačom, ktorý to zobral z úplne iného konca, je 8-kanálový - s dvojitým zmiešavaním (pre pásmo 35/40 MHz): Corona RD820II (DSP - ?), ktorý výstupné kanálové impulzy zoraďuje ako štartér bežcov na atletickej dráhe.


Veľmi pozitívnym spôsobom k tomuto problému pristúpil Assan vo svojich RC prijímačoch pre pásmo 2,4 GHz - X8R7, kde sú výstupné kanálové impulzy zoradené ako v "starých dobrých" posuvno-registrových dekodéroch. Ba čo viac, medzi jednotlivými kanálovými impulzami je vložený ešte krátky časový interval. Situáciu je dobre vidieť na obrázku, kde je čas štvornásobne "natiahnutý" digitálnou časovou lupou.



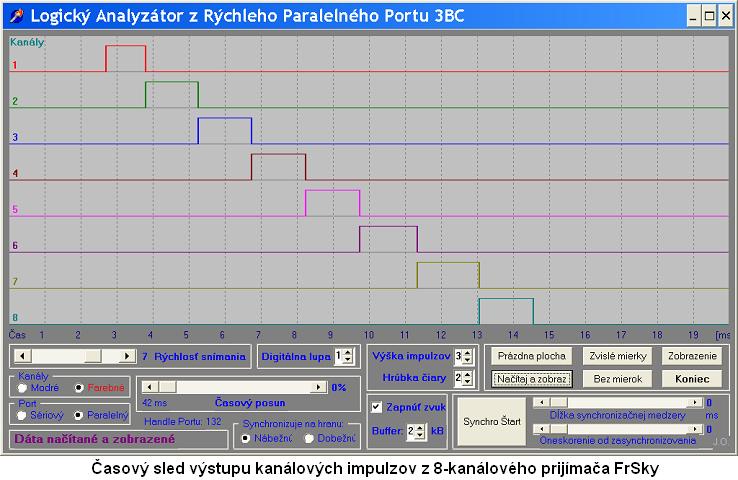
Našťastie aj prijímače FrSky D8R Two Way Telemetry 2.4GHz System zoraďujú kanálové impulzy na svojich výstupoch postupne, rovnako ako neprocesorové prijímače.
Ďalším dôvodom, prečo uprednostňujeme RC prijímače s postupným generovaním výstupných kanálových impulzov, je fakt, že v klasických (nie digitálnych) servách je prúd do elektromotoru serva privádzaný približne v čase dobežnej (zostupnej) hrany kanálového impulzu. V modeli s viacerými servami sa tak rozbehové prúdové špičky objavujú postupne (Assan, FrSky) a nie v jeden kritický okamžik, ako to môže nastať pri použití prijímača so súčasným štartom kanálových impulzov (Corona RD820II). V extrémnych prípadoch sa takýto dekodér môže stať nočnou morou, keď súčasný rozbeh viacerých serv môže spôsobiť taký prudký pokles napájacieho napätia prijímača, že dochádza k resetu mikrokontroléra prijímača.
Riešení toho problému je viacero. Pomôcť môže napájanie prijímača samostatným BECom, napájanie prijímača a serv tvrdým zdrojom (napr. NiMH, NiCd), alebo Power Box. Ale asi najjednoduchším a najlacnejším riešením môže byť pripojenie elektrolytického kondenzátora veľkej kapacity (tisícky mikroFaradov, napr. Assan dodáva 4700uF) do voľného kanálového konektoru prijímača.
Podrobne o tejto problematike pojednáva článok Vplyv odberu serv na rušenie, uvedený na inom mieste tejto web stránky.
Súvisiace články:
Použitie gýr v modeloch lietadiel - 1.časť
Použitie gýr v modeloch lietadiel - 2.časť
Dynamické riadenie gýr v modeloch lietadiel
<Staršie | tento článok | Novšie>
Napísané: 2. 4. 2022, 08:06 | Prečítané: 12495x | Kategórie: Elektronika | Napísal: admin |
Komentáre: 0
Zatial tu nieje žiaden príspevok, môžeš začať ty:-)
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)