X-coptery - stručný prehľad
Ako fungujú, sa môžete dočítať v tomto článku.
autor: vpershing
pridal: mior Názvom X-copter zvyčajne označujeme viacrotorové lietajúce stroje s vertikálnym umiestnením rotorov.
Názvom X-copter zvyčajne označujeme viacrotorové lietajúce stroje s vertikálnym umiestnením rotorov.










Pravda, sú medzi nimi aj výnimky a to i jednorotorové (VTOL) alebo dvojrotorové s meniteľnou osou rotorov z vertikálnej do horizontálnej (niečo typu Osprey).


Z konštrukcií sa najčastejšie využíva tri alebo qaud verzia (kompromis vyplývajúci z letovej hmotnosti a pohonu z relatívne dostupných dielov).
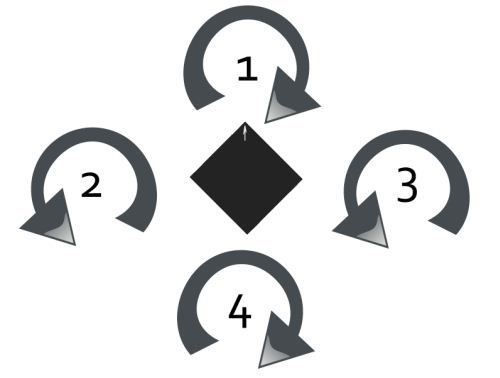
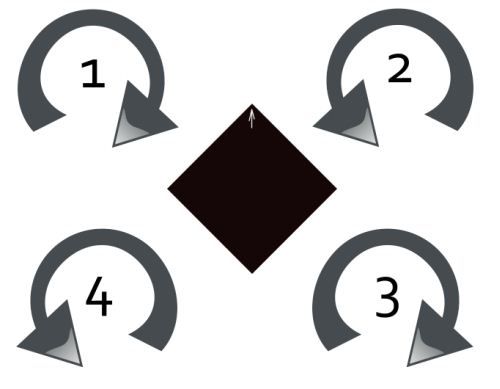
Prevedenie Quad má dve možné riešenia, tvar "+" alebo "X" podľa toho, ako sú zapojené motory a umiestnené gyroskopy, t.j. ako stroj "letí" dopredu vzhľadom k riadeniu.
Väčší počet motorov volíme v prípadoch, keď vyžadujeme kľudnejší, plynulý let s tažším nákladom. Cenou za to je ale zvýšený nárok na napajánie, čo však má zase vplyv na váhu.

Mechanická konštrukcia:
Na ramená sa zvyčajne používajú tenkostenné hliníkové rúrky s okrúhlym alebo štvorcovým prierezom priemerom cca 10-15 mm. Ich dĺžka sa volí zhruba tak, aby vzdialenosť medzi osami protiľahlých
motorov bola 40 až 70cm. Sú však aj konštrukcie zo sklolaminátov alebo komprozitných materiálov, u ktorých je však potrebné riešiť kvôli hmotnosti množstvo odľahčovacích otvorov a tak si to môžu dovoliť len tí, čo majú dostatok trpezlivosti na ich vyrezávanie, alebo vlastnia CNC stroj, ktorý im to uľahčí.
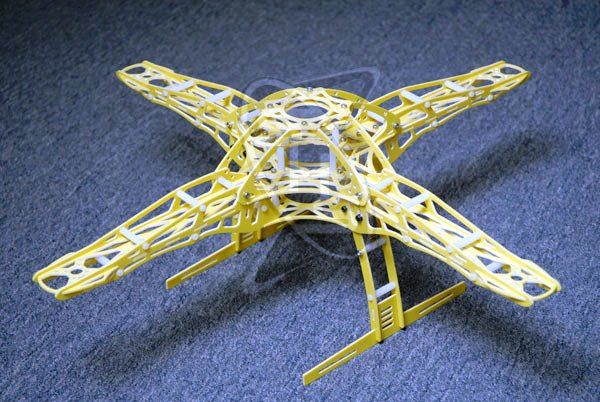
V strede býva (jedna alebo viac ks) centrálna doska (base plate) , ktorá zabezpečuje presné smerovanie a uchytenie jednotlivých ramien. Ďalej slúži na upevnenie elektrovybavenia a pohonnej batérie. Niekedy sa používa ešte rozvodná doska pre napájanie regulátorov.
Motory sa upevňujú buď priamo na rameno alebo pomocný držiak motora zo sklolaminátu. Niekedy je tento sklolaminát schválne v jednej časti oslabený tak, aby sa pri prípadnej kolízii rozlomil a zabezpečil tak čiastočnú ochranu motora.
Pri konštrukcii sa ale samozrejme dá zapojiť vlastná fantázia:

Poslednou časťou býva podvozok - od prebratých z modelov vrtuľníkov až po jednoduché "ostruhy" pod jednotlivými motormi. Letová váha takej konštrukcie sa pohybuje od 0,5 po 2 kg, Samozrejme, sú aj
Mikrocoptery s váhou nižšou alebo aj naopak väčšou, ich vybavenie však vyžaduje nie celkom bežne dostupné komponenty.
Pohon:
Na pohon sa používajú motory s nízkym Kv ~ okolo 1000. Odporúčané typy aj s nameranými charakteristikami určite nájdete na stránkach popisujúcich takéto projekty. Vrtule ako som si všimol, väčšina používa rozmerov 10x4,7. Musia zabezpečiť dostatočný ťah motorov ale taktiež musia umožniť rýchlu reakciu na požiadavku zmeny počtu otáčok ktorú vyžaduje stabilizácia (malá zotrvačnosť). U niektorých xcopterov je kvôli reakčnému momentu potrebné používať aj vrtule protibežné, s opačným smerom otáčania. Napr. Quadcopter sa okolo zvislej osi otáča práve len kvôli tomuto momentu.
.jpg)
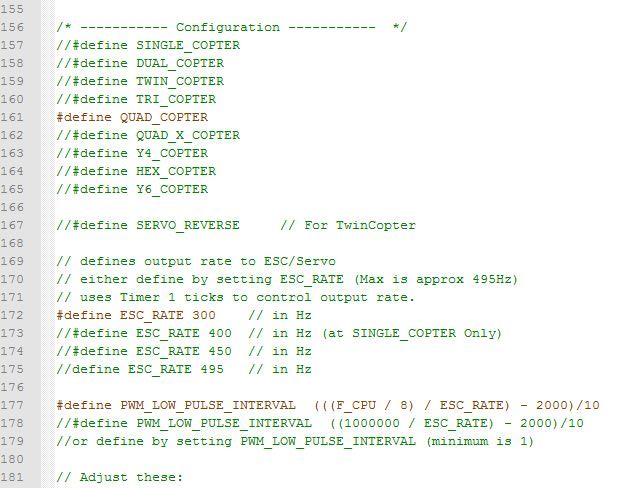
Regulátory na riadenie motorov sú odvodené od použitých motorov tak, aby boli pre ne dostatočne dimenzované. Niekedy je však na ne kladená aj ďalšia požiadavka – pre zabezpečenie rýchlejšej reakcie na zmenu otáčok motora je ich schopnosť pracovať s vyššou frekvenciou PPM signálu. Všeobecne používaný PPM signál má opakovaciu frekvenciu 50Hz. Impulz pre riadenie serva alebo regulátora s dĺžkou 1 až 2 ms sa tak opakuje každých 20ms. Elektronika riadenia xcoptera však môže byť nakonfigurovaná až do frekvencie 500Hz, t.j. impulzy riadenia sa môžu opakovať už po 2ms. Samozrejme, toto musí regulátor zvládnuť. Takéto regulátory sú napr. niektoré typy TowerPro alebo Turnigy Plush. Niekedy sa však kvôli zjednodušeniu riadenia pristupuje k preprogramovaniu týchto regulátorov. Obsahujú totiž známy procesor Atmega8 a tak modelári-vývojári navrhli do neho riadiaci program, ktorý s riadiacim procesorom komunikuje po I2C zbernici (tá má komunikačnú frekvenciu 400kHz).

Takto upravené regulátory sú prepojené na jednu riadiacu zbernicu a požiadavka na ne je realizovaná rýchlou komunikáciou pomocou ich vlastných adries. Z hľadiska riadiaceho procesora je to výhoda, keďže sa nemusí venovať generovaniu n (podľa počtu motorov) PPM signálov. Tento čas môže využiť na skvalitnenie stabilizácie letu.
Batérie sa ako inak, používajú LiPol, s kapacitou a počtom C podľa pohonných motorov. Tu treba brať do úvahy, že sa napája n - motorov a tak treba voliť typ podľa toho. Sledovaním jej napätia je vhodnejšie poveriť riadiaci procesor a tak sa regulátory nastavujú na Nimh články. Ešte poznámka k napájaniu - i keď máme n-regulátorov a zvyčajne v nich aj n-BECov, aj tak sa niekedy používa aspoň na naštartovanie systému vlastný uBEC. Úvodná inicializácia a kalibrácia riadiaceho systému trvá aj desiatku sekúnd a vlastný pohon sa pripája až po tejto dobe.
Riadenie:
K riadeniu zvyčajne postačujú štyri kanály, podobne ako u lietadla. Samozrejme, niekedy sa využíva aj viac - nastavovanie citlivosti gyroskopov, ovládanie kamery, nastavenie autonómnej výšky letu a podobne. Všetko závisí od samotnej riadiacej elektroniky v xcopteri. Podľa nej je potom aj rozloženie ovládacích prvkov na vysielači - od heli programu, cez riadenie typu motýlik až po klasické - motor, krídielka, výškovka a smerovka.

Riadiacu elektroniku v najjednoduchšom prípade nahrádza niekoľko šikovne poprepájanych gyroskopov. Pekný popis takého tricoptera nájdete na stránke http://hombre333.webnode.cz/projekty/tricopter/
U zložitejších konštrukcií sa však už nevyhneme riadiacej doske s procesorom.
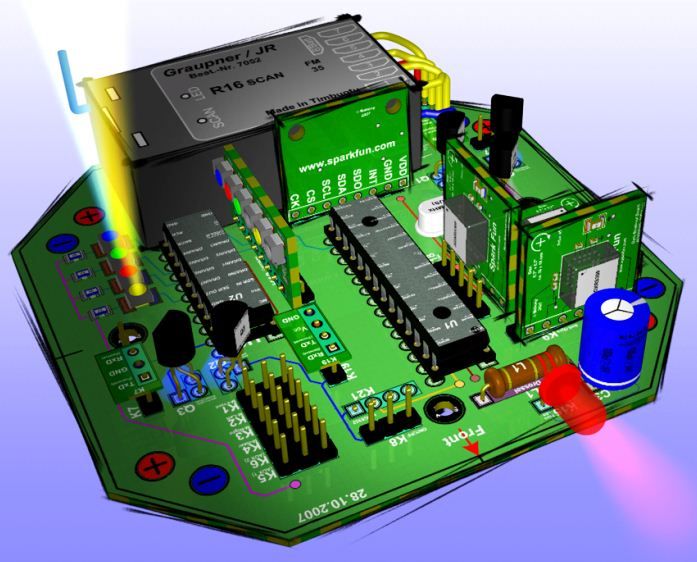
Asi najznámejšou je konštrukcia http://kkmulticopter.com/ kde nájdeme všetky podklady pre jej stavbu. Jej základom (a aj väčšiny ostatných) býva mikroprocesor Atmega48 až Atmega328.
Ďalej je minimom potreba 3 gyroskopických snímačov. Tie sa zvyknú používať z rozobratých HK401B. Plošné spoje na KK stránke sú navrhnuté priamo pre ich použitie. Stačí potom do procesora "napáliť"riadiaci program. Tých existuje niekoľko verzií. Sú k dispozícii aj ich zdrojové kódy a tak si stačí vybrať, upraviť podľa vlastných podmienok (verziu coptera, opakovacie frekvencie, použité snímače...), a skompilovať.
Niektoré z projektov využívajú namiesto trojice gyroskopov jednu modernú súčiastku - trojosý gyroskop IGT3200 alebo ešte novší IGT3205. Tieto nájdeme ani nie tak u predajcov elektronických súčiastok. Ich zdrojom skôr býva doplnok pre Nintendo konzoly - Wii Motion Plus, kde sa využíva na interakciu herných ovládačov s konzolou (a nájdeme ho na eBay). V prípade zadováženia si aj doplnku Wii Nunchuck tak naviac ešte získame aj akcelometre.

A aby sme si uľahčili stavbu (a neskôr aj následné programovanie či
preprogramovanie), rovno môžeme použiť vývojovú dosku Arduino. Tých existuje niekoľko typov. A existuje k nim aj niekoľko doplňujúcich dosiek - napr. ArduPilot shield. Pekne to nájdete rozpísané napr. na stránkach http://www.multiwii.com/
Pokiaľ prejdete niektoré zo zdrojových kódov z týchto projektov, zistíte, že sú pripravené na komunikáciu s rôznymi typmi snímačov rôznych veličín a ich zakomponovanie do celého systému riadenia stroja.
Najjednoduchšie riadiace programy v podstate len aplikujú regulačné výchylky na zmenu otáčiek toho-ktorého motora pre stabilizáciu letu, podobne ako v spomenutom tricopteri len s gyroskopmi. Zložitejšie už k tomu aplikujú rôzne algoritmy známe z automatizácie a regulácie - PID regulátory, Kalmanov filter a podobne. Nuž a tie najzložitejšie, pracujúce aj so snímačmi výšky, GPS, akcelometrami, magnetometrami atď. už umožňujú dosiahnuť určitý až úplný stupeň autonómnosti. Ako priklad uvediem http://gluonpilot.com/wiki/Main_Page .
Takéto projekty už často obsahujú aj program pre PC, v ktorom jednotlivé parametre riadenia xcoptera nastavujeme priamo (napr. krivky riadenia, konštanty PID regulátora, GPS súradnice a mnoho ďalších). K iným sa dá zase pripojiť modul s LCD a tlačidlami. Množstvo projektov nájdete na stránke http://diydrones.com/.
A čo sa dá s takým nadupaným quadrocopterom predviesť?
http://www.engadget.com/2010/12/22/quadrocopter-plays-the-piano-wishes-us-a-happy-and-complacent-h/
Ďalšie videá, natočené pomocou X-koptérov je možné vidieť na stránke http://multicopter.ru/
vpershing
<Staršie | tento článok | Novšie>
Napísané: 29. 6. 2015, 18:42 | Prečítané: 12626x | Kategórie: Elektronika | Napísal: mior |
Komentáre: 3
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
odkaz
Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
tak som presiel k "instantnemu" rieseniu, kamarat mi predal kkmullticopter dosku (cervena varianta), s tou je to ina hudba.
Len musim este spravit to vyvazenie motorov. Uz len najst cas.

Deprecated: Function ereg_replace() is deprecated in /home/gh118500/www_root/rcmodely/inc/func.php on line 407
Pridaj komentár
- Pre odoslanie správy môžete aj použiť klávesovoú skratku Alt+S. (Podporujú len niektoré prehliadače)
- HTML znaky budú prevedené na entity.
- Vyjadrujte sa tu ako doma, aby sme vedeli ako to u Vás vypadá.
- Odkazy začínajúce http:// budú automaticky prevedené na odkazy , nepoužívajte však v jednom príspevku viac ako 3 - to robia len spam roboti:-)